新型测绘技术在城市部件普查中的应用
2024-01-15周长江张晨辉
周长江,张晨辉
(1. 济南市勘察测绘研究院,山东 济南 250101; 2. 山东省城市空间信息工程技术研究中心,山东 济南 250101)
城市部件是城市基础设施的重要组成部分,是城市运行管理服务平台的基础设施数据,是智慧城市、智慧城管建设的基础。为满足国家对社会治理、城市管理的现代化及精细化要求,新时代的城市部件普查工作应重视新设备新手段的应用,探索大范围、快速、高效的城市部件普查方法。
传统的城市部件普查方法是依托传统测绘方式采用“GPS-RTK+全站仪”技术,该方法采集效率低、生产成本高、难度大、部件遗漏率高;有些普查项目在传统测量方式基础上采用移动端采集APP进行补充采集[1],受限于移动端设备的定位精度,采集APP仅适应于桥梁、停车场等空间位置概略表达的部件。随着移动测量技术的发展,车载移动测量系统被应用于部件普查,经多地部件普查项目案例验证[2-4],车载移动测量系统相比于传统的测量与普查方法,其普查成果精度更高、成果更丰富[5-6],能够大幅提高外业普查工作效率。
综上,本文分别在外业基础数据采集、部件要素提取、现场核查及补调、成果展示及应用等方面应用多种新型测绘技术,以期实现城市部件的高效采集和成果的有效利用。
1 总体技术路线
国家新型基础测绘体系为城市部件普查提供了新思路和新技术手段。按照新型基础测绘的要求[7-8],一个地理实体只测一次,避免重复测绘,缩短生产周期,提高生产效率,提升基础测绘有效供给能力;在成果应用时,实现一库多能、按需组装。因此,研究制定了以三维激光移动测量技术为主、APP补调为辅的外业普查技术路线,以及智能化自动提取为主、人工干预处理为辅的内业部件提取及处理的技术路线。三维激光移动测量的成果包括高精度点云及全景影像,能够满足大部分城市部件空间信息提取及部件照片截取的要求。
城市部件普查成果最终被应用于城市运行管理服务平台,作为其最基础的数据资源、最小的管理单元。目前,国内很多城市在开展城市运行管理服务平台建设实践[9-10],按照要求,平台需要依托城市信息模型平台进行建设。为满足在CIM基础平台、城市运管服务平台等实景三维或数字孪生平台上应用的需求,在参考《数字化城市管理信息系统》(GB/T 30428-2020)等标准的基础上,对部件的空间定位精度(见表1)、要素类型及采集原则制定了更明确、更精准的要求。总体技术路线如图1所示。
2 外业基础数据采集
外业基础数据(基础点云及全景影像)采集包括3个阶段:第1阶段,采用车载移动测量系统,采集测区内所有道路,获取高精度点云及全景影像成果;第2阶段,采用便携式三维激光扫描系统,对移动测量车未覆盖到的路段进行补测;第3阶段,车载点云成果与便携式激光扫描点云成果配准融合,形成完整的外业基础数据。
2.1 车载移动测量系统采集
车载移动测量系统集成了高精度三维激光扫描仪、IMU惯性测量装置、全景相机、高精度GNSS接收机等传感器,同时配套外业操控、POS解算、点云融合生产、全景处理生产软件等,最终成果主要为高精度点云和全景数据。车载移动测量系统采集包括准备工作、外业数据采集、采集成果质检、车载数据处理等环节,其具体流程如图2所示。
(1)准备工作。通过资料收集和现场踏勘,确定测区内道路的限高、道路施工状况、通车情况、辅道可通行性等情况,获取路线之间的关联性,最终对车载采集路线、采集时间、基站架设位置、静态停车区域进行合理规划,避免冗余或遗漏,提高外业采集效率和质量。
(2)外业数据采集。基站采集时间应覆盖车载外业采集时间,经试验,基站采用现有的GNSS基准站且采样间隔在1 s之内能保证更高的成果质量。为保证车载成果能满足城市部件采集的要求,在遵循车载移动测量系统常规采集规范的基础上,需注意以下事项:①一般城市道路行驶速度不宜超过40 km/h;②全景相机采用距离触发方式,距离不大于12 m,确保拍到尽量多的部件;③采集过程中不宜与大车并行,尽量避免出现点云空洞、全景被遮挡现象;④采集时间避开早晚上下班高峰期、避开日照过弱时间,保证部件照片质量。
(3)采集成果质检。在车载数据处理前对车载原始数据成果进行质量检查,确保没问题后再进行数据处理。车载原始数据包括:车载GNSS定位数据、基站数据、激光扫描轨迹数据、全景照片、原始点云文件。主要对这些数据的完整性及逻辑一致性进行检查:①检查GNSS基站开始时间是否早于车载GNSS开始时间且基站结束时间晚于车载GNSS结束时间,若不满足,后续POS解算将无法通过;②检查基站数据的连续性、采样频率;③检查全景照片、点云、IMU等原始文件大小、数量等。
(4)车载数据处理。将车载原始数据经POS解算、点云融合生产、全景拼接处理、点云输出等处理过程,得到高精度点云及全景照片成果,后续城市部件提取将主要依托该成果。
2.2 便携式激光扫描系统采集
车载移动测量系统能够覆盖测区内绝大部分的道路,其数据成果满足大部分部件提取的要求,但受道路限高、通行状况、遮挡等因素的影响,还需要采取更加便携灵活、适应性强的便携式三维激光扫描系统进行补测[11],本文采用的是背包式三维激光扫描系统。在部件普查外业采集中,它适用于以下场景:①车辆无法通行的、较宽的、存在较多部件、与主道之间存在防护设施或绿化设施导致点云遮挡严重的辅道;②限高导致车辆无法进入道路;③由于现场施工、堵车、路边停车等状况造成的较大范围点云空洞或拍摄被遮挡。
便携式激光扫描系统外业补充采集的生产流程包括确定测区、路线规划、现场采集、数据处理等内容。检查车载移动测量系统的点云及全景成果,确定需要用便携式激光扫描系统进行补充采集的路段,进一步规划采集路线和采集时间,进入现场进行扫描作业,对外业采集的点云及照片成果用配套的软件进行自动化处理,得到点云及全景照片成果。
2.3 多源点云配准融合
便携式激光扫描系统依靠SLAM+GNSS进行定位,本文未采用通过控制点或标靶进行点云配准的方法[12],而是在后处理阶段采用多源点云数据融合算法将便携式激光点云数据与车载点云数据进行配准融合。该技术路线有以下优势:①可有效减少控制点测设及标靶放置的外业工作量;②得到的点云成果是融合了车载点云和便携式扫描点云的完整点云,填补了车载点云的空洞和缺失;③避免在基于点云提取部件要素过程中分别加载两种点云文件造成的重复提取现象;④点云精度同样可满足部件提取要求,且作业效率更高。
点云配准融合算法采用ICP(迭代最近点)算法,配准过程如图3所示。根据同名特征点对背包原始点云和车载原始点云进行裁剪和预处理,得到背包点云数据作为源点云P,车载点云数据作为目标点云Q,点云P中的点pi从点云Q中查找距离pi欧式距离最短的点qi,通过pi和qi建立变换矩阵,并不断迭代,最终得到最优变换矩阵,实现两点云重合。公式为

图3 多源点云配准流程
(1)
式中,R为旋转变换矩阵;T为平移变换矩阵。

3 城市部件要素提取
车载移动测量系统及便携式三维激光扫描系统通过外业扫描、内业处理及点云融合获取了高精度点云及全景照片,随后便基于该成果按照规范要求对城市部件进行提取。试验和实践证明[13],高效率的部件要素提取软件对城市部件普查的成本控制、精度提高、效率提升起着关键性作用。本文采用的是适应部件采集需求的定制版LiDAR360 MLS三维要素提取软件(如图4所示)。该软件具有以下优势:①提供点云及全景双屏联动操作,较小的城市部件仅依靠点云难以分辨,依托全景照片可提高人工识别准确率;②提供多种自动化/半自动化部件要素提取方式,如基于AI的一键式全自动道路要素识别与矢量化功能,可初步提取标牌、井盖等部件要素;③拥有完善的空间要素编辑及属性编辑功能,方便提取过程中补充属性信息;④具备针对部件要素快速截图等便捷化功能。
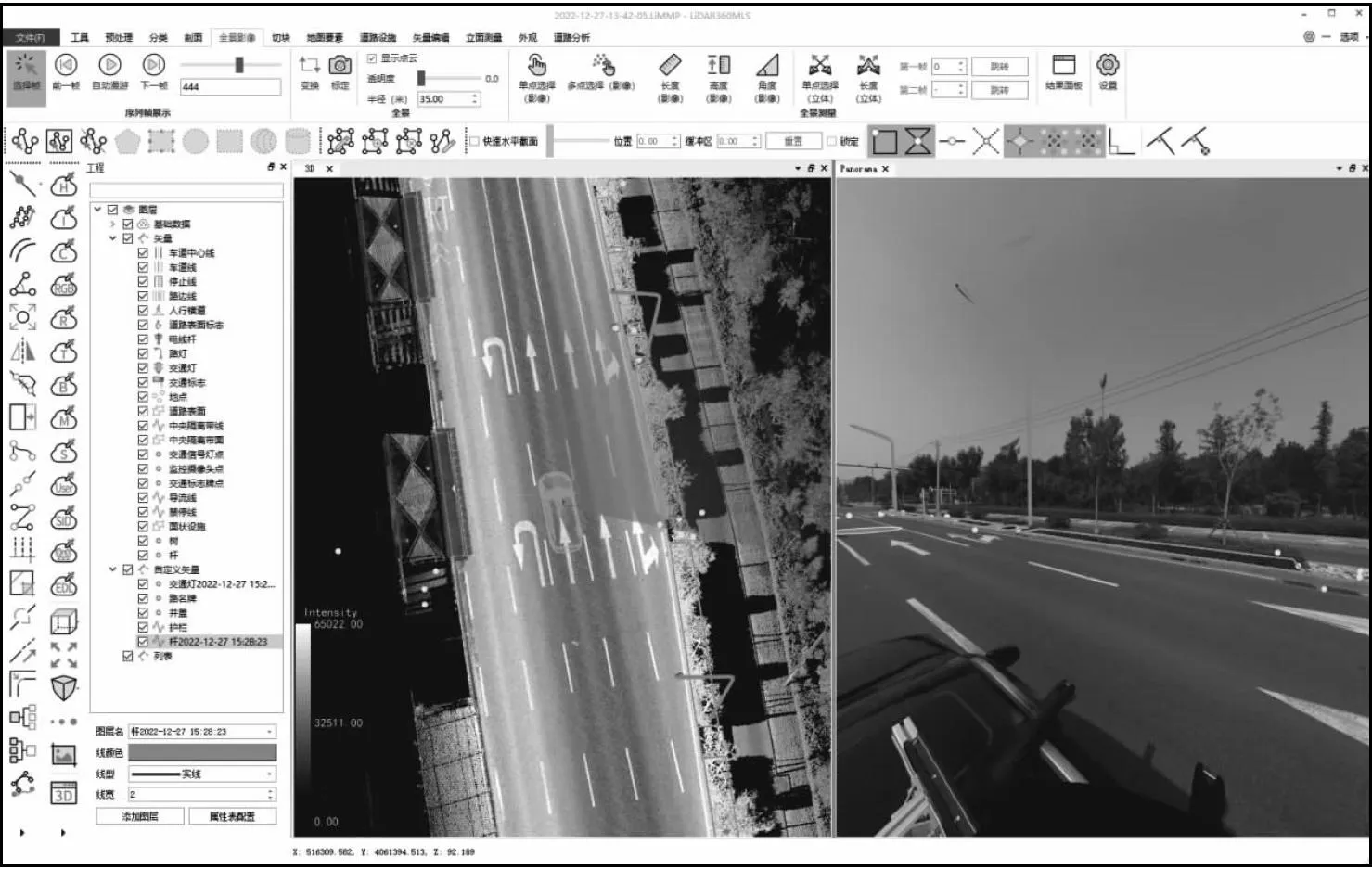
图4 要素提取软件
受传统技术条件限制,规范默认所有部件均以点符号表示。很多部件单纯以点符号表示,无法表达部件要素的真实轮廓特征,难以满足精细化管理的要求,也不适合在三维数字孪生平台中展示。三维激光移动测量技术能够提供更丰富、更精确的空间信息,可以支撑部件要素以更加精细化的方式进行表达。
本文将城市部件要素按空间数据类型分为点、线、面3种,并规定了各类部件的空间要素类型及采集原则。大部分部件如各类井盖、垃圾箱、行树等能够以点要素表达其空间特征的,仍然采用点符号表达;杆状地物、连续密集分布的地物如交通护栏等以线状要素表达;绿地附属设施、隧道口等成片分布或轮廓较为重要的部件以面状要素表达。
4 现场核查及补调
便携式激光扫描系统虽然对车载点云提供了一定的补充作用,但受树木、其他车辆遮挡的影响,点云中还是会出现不连续、范围较小、无规律的空洞;同时,部件普查需要采集部件的照片,受移动测量设备的相机分辨率、拍摄距离等限制,较小的部件及距离拍摄点较远的部件,其照片清晰度不够,部件易丢漏,部件类型易误判。因此,本文开发了外业检补调查APP(如图5所示),用于补充遗漏的部件要素、完善部件属性信息、采集更清晰的照片,还可对已采集的部件要素进行现场核查。
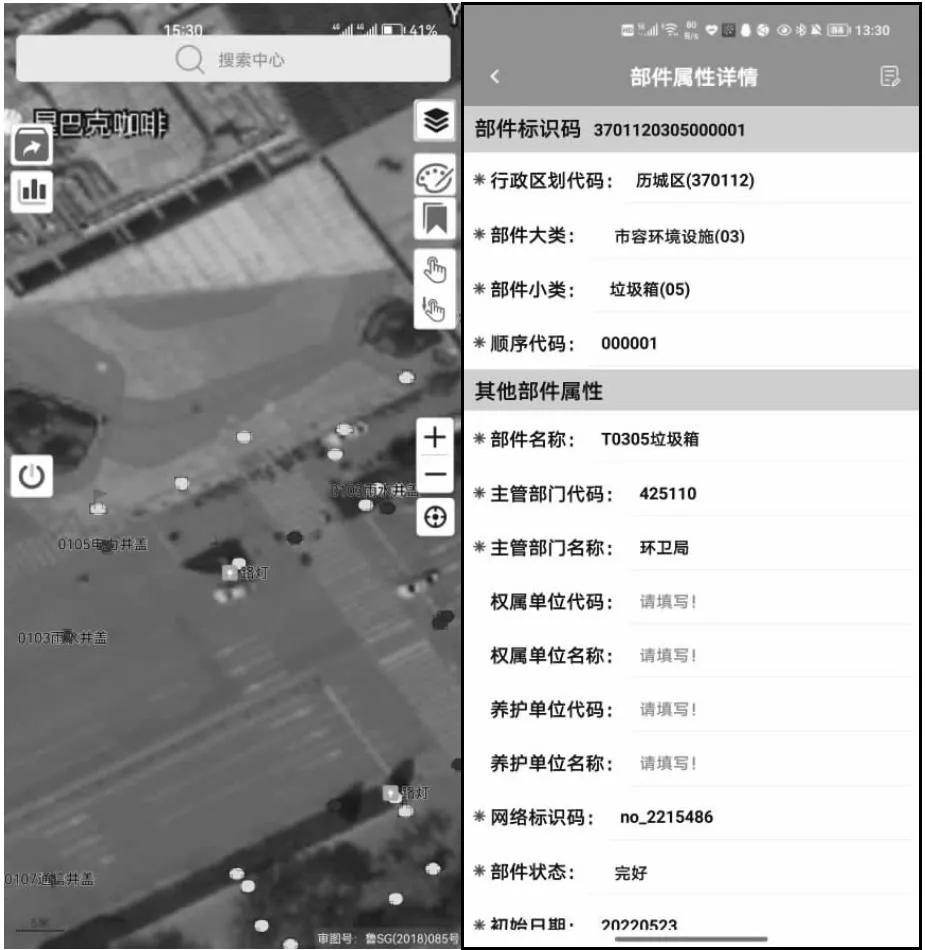
图5 外业检补调查APP界面
调查手机一般采取混合定位方式(GNSS定位+基站定位+Wi-Fi定位),其定位精度一般在10 m以上[14],不满足部件空间定位精度要求。本文基于便携式亚米级GNSS接收机(北斗探针)辅助手机定位,经调研[15]与验证,其固定解定位精度在0.2~0.5 m之间,在城市主干道上GNSS信号遮挡不严重,一般都能达到固定解精度,在高楼密集区的道路上会出现浮点解,精度在0.5~1.5 m之间,满足城市部件定位精度要求。
外业检补调查APP功能包括底图展示操作、部件要素数据导入导出及展示、新增部件、部件属性查看编辑、现场拍照、空间定位、外业标记、工作量统计等。将有问题或缺失的城市部件数据进行整理,预置到研发的外业检补调查APP中。外业调查人员手持外业检补调查APP,实地检查或验证部件位置及分类的准确性并录入部件属性信息,对缺失的部件进行补充调查。
5 成果展示及应用
城市部件要素数据成果为GDB格式的空间数据及JPG格式的照片,通过在属性表中记录照片位置及名称对两者建立关联。为更加直观有效地展示并管理部件要素,研发了Web端城市部件展示系统(如图6所示),可查看部件的空间位置、属性信息、现场照片。该系统除了能够进行部件成果展示和信息管理外,还为照片检查提供了一种便捷的手段。
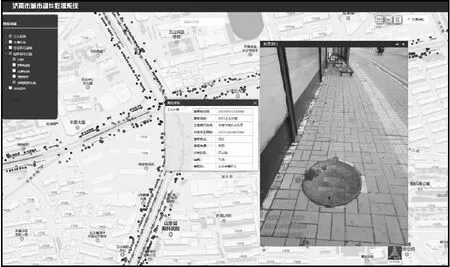
图6 部件展示系统
为实现部件数据的进一步利用,采用二三维数据融合技术将部件数据在CIM基础平台中展示,如图7所示,城市部件的矢量要素服务与实景三维可完美贴合,为实景三维数据提供了更加丰富的时空信息。

图7 部件数据融入CIM基础平台
6 结 语
随着测绘地理信息技术的发展,采用新型测绘技术的城市部件普查工作变得更加高效和智能。本文分别研究了外业基础数据采集、部件要素提取、现场核查及补调、成果展示及应用等各个阶段采用的新型测绘技术手段。外业基础数据采集阶段,应用了车载移动测量系统、便携式激光扫描系统、多源点云配准融合等技术,弥补了车载LiDAR的局限性,大大缩短了外业调查时间;部件要素提取阶段,应用了点云分类、基于点云要素提取、GIS数据建库等技术,提高了要素提取的自动化程度;现场核查及补调阶段,应用了移动GIS、混合定位、便携式GNSS接收机辅助定位等技术,为激光测量方式提供了有效补充,提高了移动端采集的精度;成果展示及应用阶段,采用了WebGIS、数字孪生、二三维数据融合展示等技术,实现了部件普查成果的有效展示和管理。城市部件普查成果如何在城市运管服务平台中深入应用,还需要进一步研究。