利用倾斜摄影与激光扫描技术构建城市级实景三维模型
2024-01-15罗振威刘承承
罗振威,李 骁,刘承承,张 勇
(1. 成都市勘察测绘研究院,四川 成都 610023 ; 2. 武汉大学资源与环境科学学院,湖北 武汉 430079)
实景三维数据是新型基础测绘转型升级的具体成果形式,也是数字中国、数字政府、数字经济最坚实的数据底座[1-2]。近10年来,实景三维建设作为一种新的城市空间信息管理辅助手段,越来越受到城市规划、城市建设等政府行政管理部门的青睐,产生了良好的社会效益和经济效益[3]。
随着“实景三维中国”[2]建设计划的快速推进和“智慧城市”[4]建设需求的不断提升,城市级实景三维模型成为构建三维基础地理信息系统的重要数据载体。目前实景三维建设技术主要包括以测绘数字地形数据构建实景三维的方法、以数字高程数据为基础的实景三维构建、基于倾斜影像数据的软件半自动实景三维构建和基于三维激光扫描技术的实景三维构建技术[5]。前两种方法属于传统的实景三维构建技术,存在着地形数据获取手段复杂、模型构建周期长、人工成本高等问题[6-7]。后两种方法是目前较为先进的技术手段,在实际三维实景模型构建中应用较为广泛,但基于倾斜影像的半自动三维构建的模型精度较低,通过三维激光扫描技术获取点云构建模型可以解决精度低的问题,但仅通过处理激光点云数据进行城市级大规模的三维实景建模成本太高。目前传统或非传统的三维实景构建方法都只能满足特定的工作需求,因此,如何能够进行高效快速的整体模型构建、准确的模型轮廓构建及精美的纹理特征呈现是三维城市实景构建技术发展的关键步骤[8]。
针对上述问题,本文利用倾斜航空摄影和机载激光扫描技术,从顶层设计出发,构建一套城市级实景三维建设的全生命周期技术路线框架,从而更加高效地获取和生产多项高精度实景三维数据和模型成果,并以成都市天府新区的实景三维建设为例,验证该架构的可行性,以期为城市规划、城市建设及智慧管理等提供支撑和保障。
1 城市级实景三维建设技术路线架构
相较于传统的二维测量手段,倾斜摄影技术不仅能够从更大的空间范围进行信息采集,而且在面对城市复杂的元素和地形时能够很好地获取空间信息,倾斜影像数据的分辨率更高,因此由倾斜摄影技术得到的影像数据可操作性更强,也是城市建筑群纹理特征信息来源的基础[9]。而激光扫描技术相较于传统测量技术,具有测量速度快的优势,能够快速得到目标测量地物的空间位置和物体表面的三维信息,可提供完整的点云数据,是地形场景构建及城市建筑群提取轮廓线的依靠[10]。
面向城市级实景三维建设,不仅需要构建大规模地形场景模型,也需要精细化、单体化的三维建筑模型[11],而单一的技术难以构建如此复杂且精细化的实景三维模型。融合了倾斜摄影技术和三维激光扫描技术的方法则可以突破传统方法构建城市级实景三维模型的技术瓶颈,因此,本文基于这两种前沿技术,构建了一套包括数据采集、数据处理与建模、模型精度评价在内的技术路线框架,如图1所示。

图1 城市级实景三维建设技术路线架构
技术架构在内业和外业两个大技术流程下进行构建,外业数据采集的成果直接决定了后期数据处理与建模的精度与效率,外业数据成果主要由倾斜摄影测量数据与激光点云数据两部分构成。其中,通过倾斜摄影获取的影像数据可以构建单体化模型成果及数字正射影像图(DOM)成果,单体化模型构成城市实景三维场景中的精细化建筑三维模型;而激光扫描获取的点云数据可以构建数字高程模型(DEM)及数字表面模型(DSM),与DOM共同构成城市实景三维场景中的大规模地形场景模型。两类数据分别处理且相互交汇形成多种实景三维模型成果,通过精度评价后,最终构成城市级实景三维场景模型。
构建的技术架构较好地结合了倾斜摄影和激光扫描两种技术的优势,提供了一种可实施的技术参考,在保障模型精度的同时减少了人工交互成本,是一套完备可行的城市级实景三维建设技术流程框架。
2 研究区概况
选取成都市天府新区作为研究区域,其位于天府新区成都直管区西南区域,面积为154.4 km2,研究区范围如图2所示。研究区域大部分坡度在2°~6°范围内,高差较大,坡度较缓,东南部分为山地。整个研究区内最高点为820 m,最低点为450 m。研究区域内约20%属于城镇区域,建筑物较密集,其余区域植被覆盖茂密,农作物、低矮灌木、乔木等植被面积占约70%。成都市天府新区属于城市中较为复杂的地理场景,单一技术难以完整且精细地进行三维表达。
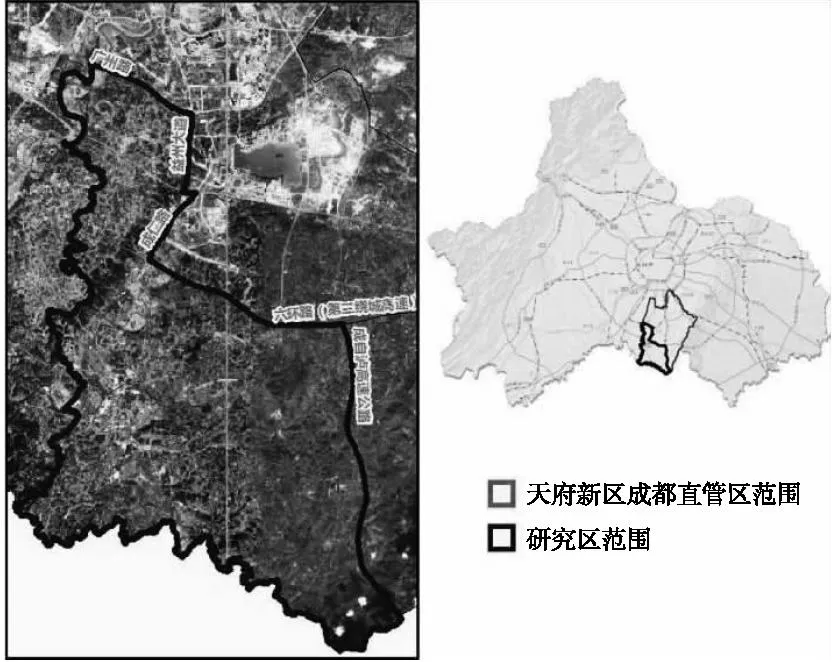
图2 研究区范围
3 实景三维模型构建方法
3.1 外业数据采集
外业数据采集分为倾斜航空摄影测量与机载激光扫描测量。为确保实景三维模型成果精度及部分中间成果的检查[12]精度,完成了各类控制点、检查点1323个,平均点密度为8.6点/km2。并以像控点设计位置为依据,在实地实施像控点标记布设和点位测量工作。汇总所有像控点坐标测量成果,实现了平面坐标转换与水准面精化处理。
(1)倾斜航空摄影测量数据采集。通过倾斜航空摄影技术获取影像数据,根据无人机平台的续航时间、操控半径及测区地形起伏情况,将测区分为多个航摄分区。在测量过程中,确保每个分区的航线长度均不大于无人机平台遥控半径的60%,以确保飞行时的安全性。根据每个分区的地形起伏情况、高层建筑分布、交通道路等情况分别设计完成了航线和像控点,将研究区域航摄分区为37个,具体分区如图3所示。

图3 航摄分区范围
同时,为满足实景三维模型的空间位置精度和结构精细度的需求,考虑测区地形起伏和高层建筑,本文设置的航摄飞行高度为240 m,航摄影像的分辨率为3.8 cm/像素,影像航向重叠度为80%、旁向重叠度为65%,满足《低空数字航空摄影测量规范》(CH/Z 3005-2010)的要求。
(2)机载激光扫描数据采集。通过机载激光扫描技术获取点云数据[13],为满足DEM高程精度和实景三维模型高程精度的需求,将点云密度设为30点/m2。根据激光扫描仪的有效测程,并考虑研究区域内地形起伏和高层建筑等因素,将飞行高度设为150 m。为保证点云预处理精度与数据覆盖范围,航向重叠度设为30%,满足《机载激光雷达数据获取技术规范》(CH/T 8024-2011)要求。
(3)外业数据成果检验。共布设和测量有效点位1323个,经过检查,像控点符合使用要求。倾斜摄影数据获取共计飞行109架次,激光扫描共计飞行23架次,包括正常飞行和补充飞行,获取数据质量全部满足后续应用要求。
3.2 内业数据处理与建模
(1)影像数据空中三角测量与自动建模。本文的空三工程在瞰景Smart3D软件[14]中完成,完成后即开始进行连接点匹配,软件自动匹配出相邻影像的大量同名点,并完成影像自由网空三平差。完成连接点提取且检查通过后,开始对该分区的像控点进行量测处理。由软件对连接点、控制点、POS值等进行光束法约束平差处理,最终获得具有高精度的连接点和影像的内、外方位元素成果。在空三平差后,自动计算出每个检查点的误差值。
模型的生成是利用倾斜摄影软件,完成空三处理,并检查通过后进行自动建模,最终得到精度、精细程度、纹理色彩均符合真实场景的OSGB格式的三维模型,模型成果如图4所示。

图4 OSGB格式的模型成果
(2)激光点云处理。激光点云数据的处理包括剔除噪声和异常值。通过对点云数据的滤波,从较低的激光点中提取初始地表面,基于初始地表面进行迭代运算,获取地面点云数据和非地面点云数据,如图5所示。目前自动分类的算法可以达到约80~90%的正确率,但是在陡坎、梯田田坎等地形突变的区域就会出现地面点缺失的现象。因此,为确保地形的完整性,滤波完成后还需要由人工交互进行分类纠正。最后将点云数据进行必要的平面坐标系转换和高程转换,得到成都市平面坐标系和1985国家高程基准下的点云成果。

图5 点云自动滤波处理
(3)模型成果。点云数据处理完成后,设置相关参数,包括格网尺寸、外扩缓冲区、最大三角网尺寸等,再利用地面点自动输出DEM,利用格网内最高点自动输出DSM。同时,对倾斜摄影测量中导出的空三成果进行相应的数据分析和转换,形成可靠准确的相机参数和影像的外方位元素;并利用旋转角系统转换系统[15],将矩阵形式的影像姿态信息转换为Omega-Phi-Kappa形式的转角系统。最后,在数字摄影测量系统中导入上述成果及DEM数据成果。利用DEM构建的地形模型对影像进行正射纠正,输出每张影像的正射纠正成果。在数字摄影测量系统中对正射纠正的影像进行自动拼接和镶嵌处理,使不同影像之间色彩均匀、过渡合理,最终输出为指定图幅的分幅DOM成果,如图6所示。

图6 影像镶嵌处理形成的DOM
(4)实景三维模型。利用三维GIS平台的地形模型制作工具,导入DEM与DOM成果,自动构建地形场景模型,如图7所示。地形模型是下一步构建实景三维模型的基础。

图7 地形模型制作
另外,将由影像数据处理得到的OSGB模型导入软件中,设置相关参数后,根据OSGB中需要单体化的建筑物对象所呈现出的位置、形状、结构等信息,重新构建出模型。对原始倾斜影像自动贴纹理实现模型精修,纹理通过照片坐标和模型坐标匹配,人工进行干预选择最佳纹理吻合的区域,自动完成纹理映射(如图8所示)。

图8 单体化建筑模型制作
3.3 精度评价
为保证最终构建的实景三维模型精度,本文根据相关规范标准对技术架构过程中的各项成果进行了精度评价,采用中误差与误差最大值两个指标评价模型的精度,结果见表1。

表1 模型精度评价结果 m
经查验,成果各项指标满足《实景三维中国建设技术大纲》中城市级实景三维建设数据精度和地理实体的采集要求,模型精度符合设计要求,表达质量符合要求,逻辑一致。
3.4 城市级实景三维模型成果
经过精度评价检验后,由地形场景模型与建筑单体化模型融合并共同构成城市级实景三维模型,如图9所示。该实景模型包括DEM、DOM、DSM及单体化模型在内的各种模型成果,形成了数字城市建设的二三维一体化基础底座。

图9 城市级实景三维模型局部示例
4 结 语
城市实景三维模型是对城市进行信息管理的重要手段,随着无人机技术与三维激光扫描技术的不断发展,地理信息数据的现势性和准确性得到了进一步提高。本文基于倾斜影像数据和激光点云数据系统性设计了城市级实景三维建设技术架构,包括数据采集、数据处理与建模、模型精度评价在内的全生命周期流程。试验证明,本文方法在全面保障三维模型精度的同时,大幅节约了生产成本,也为后期实景三维成都建设和其他城市级实景三维建设研究提供了参考依据。
在实际生产过程中,面向城市级实景三维建设的整体技术框架设计仍然存在依赖于人工的关键技术,但其有待攻克。总体而言,当前实景三维信息源数据的快速获取与自动化处理技术已逐步成熟,但三维实体数据提取与构建的自动化率还较低,仍涉及大量人工处理,多源多尺度三维实体的自动化匹配技术也有待研发,这是未来实景三维建设的重要挑战。