远场合成孔径计算光学成像技术:文献综述与最新进展
2024-01-13王博文管海涛梁坤瑶
李 晟,王博文,管海涛,梁坤瑶,胡 岩,邹 燕,张 许,陈 钱*,左 超*
1 南京理工大学电子工程与光电技术学院,智能计算成像实验室(SCILab),江苏 南京 210094;
2 南京理工大学智能计算成像研究院(SCIRI),江苏 南京 210019;
3 江苏省光谱成像与智能感知重点实验室,江苏 南京 210094;
4 陆军装备部驻南京军事代表处,江苏 南京 210024
1 引言
当罗马人单手半握成环形并置于眼睛前方以求远处所观物体变得清晰时,探测“detection”一词的拉丁语“dētēctiō”就伴随着简易光学成像系统的出现诞生了,其中“dē”意为缺乏,“tēctiō”意为隐藏,以此表明彼时罗马人利用光学系统进行探测的意图-使观察目标无所遁形。自1608 年汉斯·李波尔将两块透镜装载在直筒中形成望远镜伊始,人类探索遥远彼方的历史便由此书写。蓦然回首,我们已经在影像的发展中通过光学、信息学、遥感技术等手段将长筒望远镜进化为数码相机、摄影手机等高度集成的成像系统,人们只需要轻按拍摄键就可以用图像记录下静谧的宇宙。得益于电荷耦合元件 (charge-coupled device,CCD)与互补金属氧化物半导体 (complementary metal oxide semiconductor,CMOS) 的发明,光信号的数字化记录、存储、传输已被广泛应用,并极大地拓展了人类的视觉感知,如今人类已能够共享詹姆斯-韦伯等天文望远镜所拍摄的来自于130 亿年前的星光图像,这不仅从空间维度上记载无垠远方的探测结果,更从时间维度上实现对光学信号的映射。光学研究人员在现有知识与技术的积累上,更加前赴后继地将能够探测“更远、更广、更清晰”目标的愿望寄于手中精密的光学成像系统中,力求在时间分辨率、空间分辨率、成像灵敏度等诸多方面进一步突破光学成像技术的限制。
时至今日,光学成像技术已经不局限于“所见即所得”的成像模式,特别是在先进光学遥感与高性能成像领域,光学成像技术正逐步以多方向、多维度、多层次为目标向前发展。然而,传统光学成像技术本质是场景的光场强度信号在空间维度上的直接均匀采样记录与再现的过程:场景经过光学透镜系统折射后聚焦投影到传感器,传感器像素和目标场景之间通过建立“点对点”的一一对应关系来获取图像,传感器得到的数据经过数字化处理后形成计算机能够储存、分享与显示的数字图像。在此过程中,图像的分辨率与信息量不可避免地受到光学衍射极限、探测器离散采样、空间带宽积(space-bandwidth product,SBP)等若干物理条件制约[1-3]。
另一方面,光学成像经历了光化学成像、胶片成像再到当下以光电成像技术为核心的数字成像,成像方式已有巨大改变。在商用成像领域作为传统光学成像技术的具体映射,光学成像系统却在这期间几乎不存在根本性的变革,成像系统的空间带宽积始终限制了更多信息量的获取,导致在空间分辨[4]、时间分辨[5]、光谱分辨[6]、信息维度与探测灵敏度[7-8]等多个维度上无法满足成像需求。特别是空间分辨率作为天文、遥感等远场探测应用中评判图像质量和信息量的重要指标,长久以来受限于光学衍射极限和探测器离散采样的物理限制;前者是由于光学成像系统相当于一个图像信号的低通滤波器,接收的目标信息频率响应会在某个衍射上截止,称之为衍射极限影响的光学分辨率;后者是由于传感器的像素是组成数字图像的最小单元,像素数量越多且越细腻,图像分辨率越高,而图像承载的信息量就越大,但受到探测能效、制作工艺、光电串扰、功耗成本等因素的限制,光电探测器的像元尺寸无法无限制缩小,规模也无法无限制扩大,称之为采样极限影响的图像分辨率。可以说,现有光学成像系统都面临着“看不见”、“看不清”、“看不远”的目标观测困境。
不同于采样极限是探测器像素数量的限制,光学衍射极限对系统成像分辨能力的限制本质上是系统孔径的限制,即有限的系统孔径限制了成像系统的成像分辨能力。合成孔径光学超分辨率成像技术主要借助于 Lukosz 超分辨率思想,通过多个小口径光学系统的图像数据合成等效获得大口径光学系统的成像能力。传统合成孔径成像技术(如合成孔径雷达)是一种基于主动照明的相干探测成像机制。通过发射大时宽-带宽积的信号(如线性调频信号),对目标回波进行脉冲压缩,获得面向距离的高分辨率;其成像原理是在平台与目标相对运动的情况下,利用多普勒频率的线性变化,记录平台不同位置处的目标回波信号;经过数据处理,将发射孔径在空间上合成一个虚拟大孔径,实现方位聚焦,获得方位向的高分辨率图像。在七十年的发展中,合成孔径技术已经在微波探测领域广泛应用。尽管已经拓展出了光学合成孔径和激光合成孔径雷达等细分领域,但合成孔径技术的整体内涵概念仍旧局限在Lukosz 所提出的“空间带宽积调控”理论中,彼时基于“调制解调”的计算成像思想还仅仅处在启蒙阶段,因此将合成孔径纳入计算成像体系的实例还相当有限,合成孔径技术的概念依旧被孤立在现代计算成像体系之外。
随着信息技术的高速发展,光学成像技术被赋予了新的活力,在20 世纪90 年代中期,原本只负责前端调控的光学成像研究人员和只进行图像数字处理的计算机视觉研究人员为了突破各自领域的成像瓶颈,将前端光学调控与后端探测信号处理进行联合设计,“计算成像”(Computational Imaging)应运而生,悄无声息中颠覆了人类与机器感知世界的方式。得益于“可调控”光学器件的出现、先进高分辨高灵敏度光电传感器的诞生以及数据处理能力日益提升,如今,计算光学成像已发展为一门集信息光学、计算机视觉、计算光学、现代信号处理、几何光学等理论于一体的新兴交叉技术研究领域。在计算成像体系趋于成熟的今天,再回到Lukosz 所提出的“空间带宽积调控”理论时,合成孔径技术能够算是人类历史上最早采用“计算成像”思想的光电探测系统,因为Lukosz 超分辨率思想反映了计算成像的最精髓部分,即“先调制,再拍摄,最后解调”这种“混合光学-数字”成像方式的缩影。特别是,随着计算成像中存在的相位复原、叠层成像等机制进一步引入合成孔径技术中,计算成像又赋予了合成孔径崭新的可能性。因此,在多个实例的进一步验证下,合成孔径技术被归纳于当下计算成像的体系框架中。
在此背景下,本文概括性地综述了计算成像技术在远场光学合成孔径探测领域中的历史沿革、发展现状以及未来趋势。从计算成像的大框架体系中对现有的各种合成孔径技术进行解读,梳理基于计算成像技术的远场光学合成孔径研究脉络,以计算成像视角建立合成孔径技术体系的分类,进而对体系中的共性问题及关键点进行讨论。在第二节中我们首先从光学衍射的角度阐述了分辨率与系统口径的关系。第三节中介绍了合成孔径思想的起源及其在射频波段的发展与应用,并基于Lukosz 超分辨原则阐述了合成孔径技术可以被理解为“空间带宽积调控”策略。在第四节中,我们将专注基于相干光调控的光学合成孔径技术的介绍,由主动发射的相干信号作为探测光,在微波、近红外、可见光波段成功验证合成孔径超衍射极限成像的可行性。介绍了基于相干光调控的干涉合成孔径成像技术,并对其发展方向进行了概述。第五节详细介绍了基于非相干光远场被动合成孔径成像技术,阐述了经典非相干光学合成孔径技术到新兴非相干光学合成孔径技术的演变,进一步揭示了当前“非相干、无源被动、超衍射极限”成像的迫切需求及其现阶段存在的瓶颈问题。在第六节中展望了今后的研究方向以及解决这些问题可能的技术途径。
2 衍射极限与分辨率
光学成像过程通常是一个点对点映射的过程,理想情况下,一个无穷小的物点通过理想光学系统后,会在像面汇聚形成一个无穷小的点。然而,由于光波的衍射特性以及系统的有限口径,物点经过成像系统后会扩散形成点状光斑,称为“艾里斑”。定义能够区分两个等强度物点的最小距离为成像系统的空间分辨率(后简称分辨率,并且为衍射受限引起的光学分辨率)。根据瑞利判据,以第一个物点产生光斑的中心与第二个物点产生光斑的一级零点重合的情况作为能够分辨的临界位置,可以得到系统分辨率与口径、波长的关系,用公式表示即δ=1.22λf/D,其中D为光学系统的口径,f为光学系统的焦距,λ表示波长,即分辨率与波长成反比与口径成正比。
如图1(a)所示为一般系统的成像过程,目标经光学系统后形成图像,并由传感器记录。根据瑞利判据,在系统光照确定的情况下,要通过减小系统的工作波长来提高成像分辨能力并不现实。因此光学衍射极限对系统成像分辨能力的限制本质上是系统孔径的限制,即有限的系统孔径限制了成像系统的成像分辨能力,这是合成孔径作为技术手段进行分辨率提升的核心思想[10]。因此,以往的光学成像系统大部分都是以增加系统口径作为提升分辨率的主要手段。然而,成像系统口径的增加会造成重量和成本的增长,在商用成像领域,系统分辨能力与重量、成本的矛盾关系如图1(b)所示。更为重要的是,天文望远镜以及侦察卫星等高精尖设备对运载重量的限制会更为苛刻,1976 年发射的KH-11 的主镜口径约为2.4 m,整个卫星的重量为11 吨。而1986 年发射KH-12 的主镜只将口径提升了0.8 m,卫星重量就已增长到了17 吨,接近空间运载能力的极限。不仅如此,由于光学系统的制造成本约与系统口径的2.76 次方成正比,因此超大口径的成像系统还会引起制造成本难以负担。例如1990 年发射升空的哈勃空间望远镜的主镜尺寸为2.4 m,但从研制到升空,总共花费了将近12 亿美元,工作至今的累积费用已达到100 多亿美元,远远超过了当时2 亿美元的预算。而原定于2007 年发射的韦伯望远镜也由于经费等各种原因数次推后至2021 年才发射升空。另外,随着口径增加,还需要考虑工艺制造难度、对系统的材料要求、现有制造技术瓶颈等问题,导致在实际的成像系统中,一味增加系统口径不现实。综上所述,基于“所见即所得”的传统成像技术已无法满足当今军事和民用领域对高分辨率成像应用日益增长的需求。

图1 传统光学成像系统。(a) 传统光学成像系统的成像过程[2];(b) 远场探测中不同光学成像系统分辨能力与成本、重量的矛盾关系[9]Fig.1 Conventional optical imaging system.(a) Conventional optical imaging process[2];(b) The contradictory relationship between resolution,cost,and weight of different optical imaging systems in far-field detection[9]
3 合成孔径技术与计算光学成像
合成孔径技术是突破口径的衍射极限、提升成像分辨率的重要手段,根据衍射极限δ=1.22λf/D,合成孔径技术通过增加系统孔径大小实现成像分辨率的提升。其思想最早可以追溯到1868 年Fizeau 提出的恒星干涉技术,通过在望远镜前放置两个通光小孔,测量并分析从小孔中通过的光信号产生的干涉体条纹,进而推算星体的直径。1920 年,Michelson 利用这一方法首次对猎户座α 恒星的角直径进行了精确的测量(如图2(a,b)),测量结果为0.047 arcsec,分辨率远高于当时单孔径望远镜镜头衍射极限所能达到的最高分辨率。虽然这一技术在当时仅能够用于测定恒星尺度,无法形成图像,但其中所蕴含的干涉测量的思想为后续的非相干合成孔径成像与探测的发展打开了全新的思路。然而,受到时代技术条件的限制,合成孔径在光学波段并没有得到很好的实践。但是相关理论在波长更长的射频波段却得到了广泛的应用,并逐步成为了射频波段实现高精度探测的主要手段。1946年Ryle 和Vonberg[11]基于光学干涉测量的原理,建造了早期的两单元射电干涉仪,用于宇宙射电辐射的研究,借助两天线信号的干涉处理,能够实现较单天线更高的射电源观测精度。
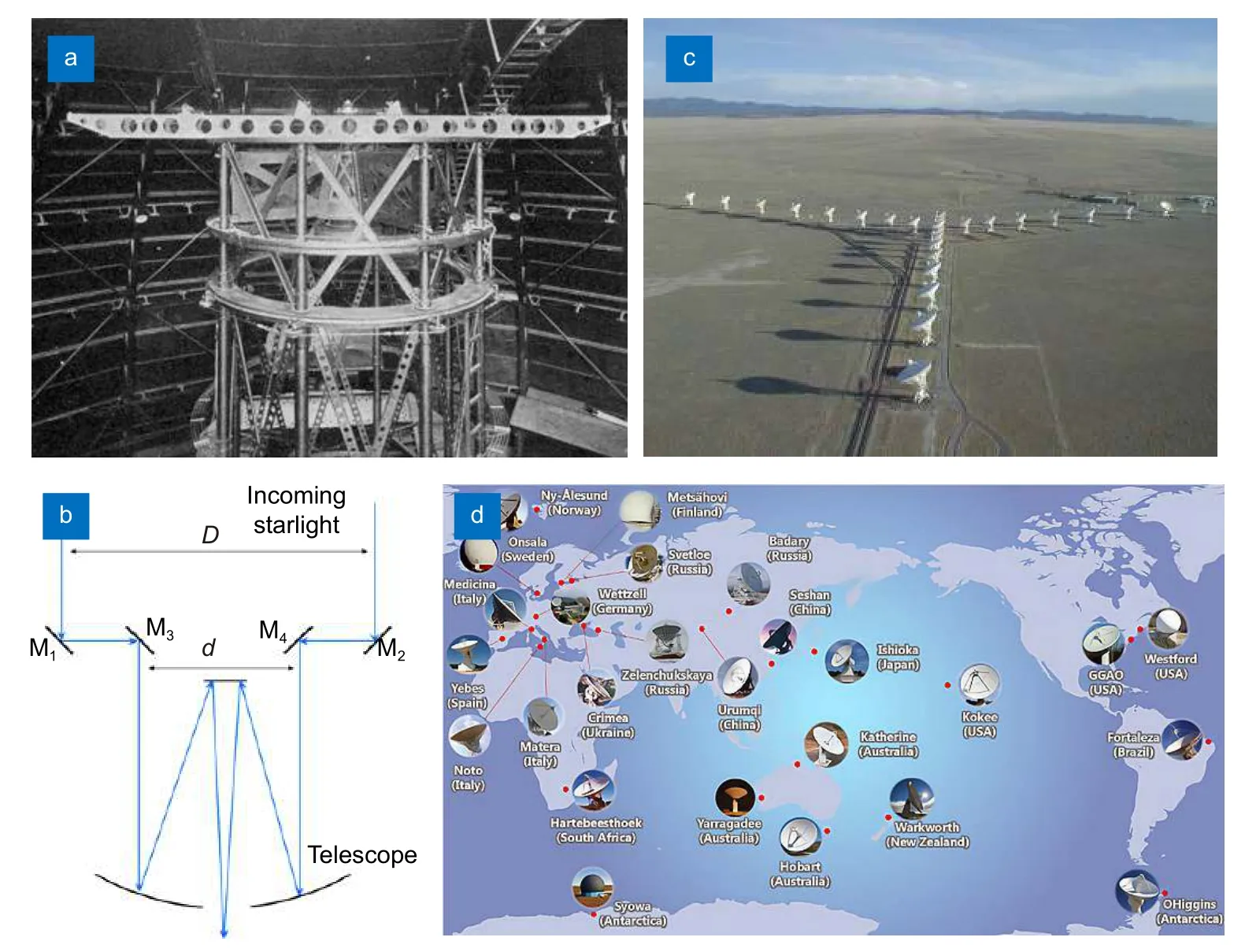
图2 (a) 迈克尔逊恒星干涉仪;(b) 恒星光干涉结构示意图;(c) 位于美国新墨西哥州的甚大天线阵[12];(d) 全球范围的甚长基线干涉测量技术Fig.2 (a) Michelson stellar interferometer;(b) Schematic diagram of stellar light interference;(c) Very large array (VLA) in New Mexico,USA[12];(d) Global very long baseline interferometry (VLBI)
随着计算机技术的发展,通过地球自转等方式改变干涉基线以采样目标的空间频谱,进而对获取观测目标图像的技术也陆续实现。当前,射电干涉已经成为天文观测不可或缺的手段,并借助于合成孔径技术,逐步形成了射电天文学这一新兴的学科。图2(c)为位于美国新墨西哥州的甚大天线阵列[12](very large array,VLA)是目前世界上最大的合成孔径射电望远镜。图2(d)所示的甚长基线干涉测量(very large baseline interferometry,VLBI)是当前射电天文观测中的一项重要技术,其允许全球范围内的射电天文望远镜进行联网构成干涉基线,以合成孔径的方式实现更高精度的干涉测量。合成孔径技术在射频波段的发展也为用于计算光学成像的合成孔径技术提供了借鉴[13-14]。
计算光学成像是近年来提出的一种联合前端光学调控与后端信号处理,从而实现特定成像功能与特性的新兴领域。然而,在远距离探测的应用背景下,尤其是电磁波谱中的长波波段,这种基于信号处理与分析实现间接成像的思想事实上早已得以应用。
1966 年Lukosz 从光学信息传递系统出发建立的Laue-Lukosz 自由度不变定理:给定一个光学系统,其可传递的光信息自由度数是常量;但系统的空间频带是可变的,因此可以通过减少总自由度数N的某一个因子来扩展空间频带宽,以提升成像系统的分辨率[15]。这一理论也从信息论角度对SAR 等突破孔径衍射极限实现超分辨探测的理论重新进行了阐述。借助于这一定理,SAR 等一系列以计算成像思想为基础的分辨率提升方法都可以归纳为空间带宽积调控的方法:如图3 所示,通过一定的编码方案,将总信道容量的一部分用于传输图像信号的各个频段,这些频段可以在原系统的通带之外,从而为突破成像系统的光学衍射极限提供了可能性。

图3 计算光学成像系统的成像过程[2]Fig.3 Imaging process of the computational optical imaging system[2]
根据Laue-Lukosz 自由度不变定理,经典空间频带展宽可以通过牺牲另一个维度上的自由度实现。这也是经典空间频带展宽方法需要遵循的一个前提-信息不会无中生有,想要在“分辨率”上有所“得”,就必须在另一个自由度上,如时间分辨率、成像视场等,有所“失”[1]。相较于传统光学成像系统的单一提升手段,计算成像技术实质上给人们提供了各种方法选择“得”与“失”的合理对象。在合成孔径雷达中,自由度的选择体现为牺牲时间分辨以换取空间分辨,因为单次测量的图像依旧是衍射受限,借助于物体与目标的相对运动实现连续记录系列衍射受限图像后才能合成一张高分辨率图像。后续工作中,激光合成孔径雷达、综合孔径光学成像以及新兴的非相干合成孔径远场探测等技术都是在“得”与“失”的选择中力求以更简洁高效的方法获取成像分辨率的进一步提升。
按照计算成像技术的发展时间线来理解,合成孔径的发展可以整理与归类为图4 所示:在计算成像体系还未构建时,微波领域就已借鉴了Lukosz “空间带宽积调控”策略实现了合成孔径雷达、射电望远镜的孔径合成;当将微波的合成孔径技术向可见光迁移时,全息、混频等相位获取方法又进一步推进了计算成像体系中合成孔径以及空间带宽积调控的发展,其中不乏将远场探测的理论与技术应用到了医学成像、显微成像、工业检测等领域;到21 世纪计算成像技术已经发展为一门较为完整的交叉技术研究领域时,受显微成像发展需求诞生的非干涉合成孔径成像技术又对同属于计算成像体系下的远场探测技术进行反哺,实现了基于相干光调控的非干涉式远场合成孔径成像;同理,全息成像、微透镜阵列等技术在成像学的应用也从另一方面为SPIDER、FINCH 等新兴合成孔径技术在远场探测的发展提供可能。
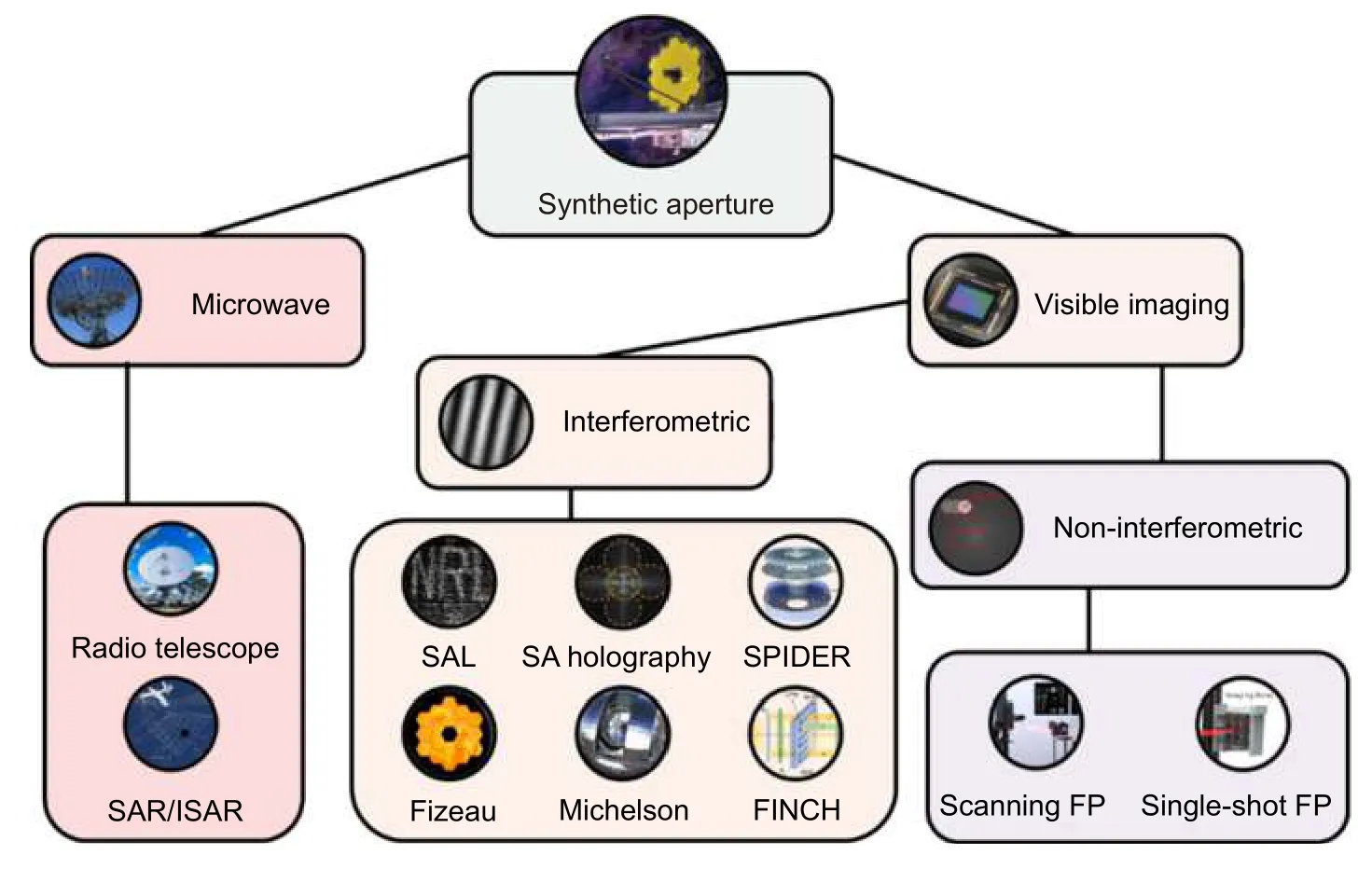
图4 合成孔径技术在远场探测领域的分类及发展Fig.4 Classification and development of synthetic aperture technique in the far-field detection
4 基于相干光调控的远场合成孔径成像
4.1 基于相干光调控的干涉式合成孔径成像
在可见光成像中,要实现合成孔径直接成像(即通过衍射极限公式δ=1.22λf/D提升系统孔径),通常需要共相探测的方式获取,而相干光调控下的合成孔径则需要获取各个子孔径的相位信息。基于相干光调控的远场探测合成孔径成像技术通过发射一束相干光实现对探测目标照明,成像系统通过收集其反射光的信息实现合成孔径成像。由于能够主动对目标进行全天候成像而不依赖于环境光,因此基于相干光调控的远场合成孔径成像技术在遥感、军事探测等领域应用较广,作为计算成像思想的衍生,合成孔径雷达和综合孔径射电望远镜[16-17]都具有明显基于相干光调控的合成孔径成像技术的特点,由于使用的微波波段限制,这些合成孔径技术都无法获取突破性的分辨率提升。从另一方面来看,由于这些技术都是在微波波段进行,因此探测系统的天线能够直接获取目标的相位信息,从而直接实现孔径合成。如果使用可见光波段进行合成孔径成像,理论上能取得更高的分辨率,然而,现有探测器无法实现对相位信息的直接记录,因为如果要记录可见光的相位,则需要探测器的响应频率大于1 fs,现有的光电探测器远远达不到此标准。因此要想实现基于相干光调控的合成孔径成像,只有通过另外的方法求解获取相位,才能够准确地实现孔径合成。通过干涉的方法获取相位信息已经在信号处理等多个领域得到了验证,即记录对应形成的干涉条纹,再通过解调获取记录的相位信息。基于相干光调控的干涉合成孔径成像主要在合成孔径数字全息术(synthetic-aperture digital holography)以及合成孔径激光雷达(synthetic aperture lidar,SAL)两个方面被广泛应用。
自1961 年世界上第一台红宝石激光器诞生时起,通过主动发射激光实现相干探测的研究也随即开始。利用相干光实现合成孔径成像可以追溯到全息技术的使用中。在激光器问世前的1948 年,英国物理学家Gabor[18]就在Nature上发表了相关论文。他在电子显微领域通过将两束电子干涉获取了明暗条纹,再通过解条纹而获取到了图像信息,Gabor 将其称为全息术。然而由于相干性的要求,真正的光学全息图直到1964 年才由相干激光光源实现[19]。在此之后,全息术开始向高分辨、高精度、无伪影快速发展。借助合成孔径雷达突破孔径衍射极限的方案,研究人员将多帧数字全息图的数据组合从而合成更大的成像孔径,显著提高了系统的空间带宽积。Aleksoff[20]利用了光学干涉和全息成像的思想,在1987 年利用二氧化碳激光器实现目标的高分辨率3-D 合成孔径。激光器能够以100 Hz 的速度运行,并且此时能够以数字化系统记录接收脉冲和发出脉冲,因此成像精度有一定提高。但是Aleksoff 提出的成像方案的工作方式过于复杂,通过收集合成孔径激光雷达获取的测距信息后通过多普勒频移实现分辨率提升。整个实验装置不仅需要三台迈克尔逊干涉仪来监测目标和传感器台的运动,并且还需要利用四分之一波板等器件进行分束、重组等过程,如此复杂的成像方式明显不适用于实际应用场景。因此,要想在可见光以及近红外范围内实现合成孔径成像,首要考虑的应该是简化成像系统,避免利用复杂的合成孔径激光雷达系统实现分辨率提升。
2011 年,Tippie 等人直接利用CCD 在二维平面上移动,将不同位置的全息数据组合,获取了两亿像素的合成孔径数字全息图。在此基础上通过相位误差修正算法解决了参考光束漂移以及定位误差等问题[21]。利用相机扫描实现合成孔径数字全息的成像光路示意图及USAF 分辨率板的成像结果如图5 所示。通过将450 mW 功率的氩离子激光分为参考光和照明光两臂,其中参考光通过5 倍显微物镜耦合至单模光纤,同时照明光束对镀铬USAF 分辨率靶标进行照射,相机获取目标粗糙表面的漫反射光与参考光的干涉信息后进行扫描合成等效大孔径。相机在扫描过程中相邻帧之间存在50%重叠以实现对齐以及帧配准,显著降低了全息合成孔径中的像差,使得全息合成孔径能够相比合成孔径激光雷达更为简化的系统中实现空间带宽积提升。为了波前误差的校正,全息合成孔径在扫描过程中必须要将相位误差控制在波长的十分之一以内,并且配准必须要控制在七分之一像素内,而连续采集多帧图像的过程将成像时间增加到6 个小时,自Abbie 后的改进工作也并没有解决成像条件严格以及采集时间过长的问题,因此没有取得显著的后续发展。

图5 Tippie 通过相机扫描获得两亿像素合成孔径数字全息成像的系统示意图及USAF 分辨率板的定量提升效果[21]Fig.5 Tippie's system schematic for obtaining 200-megapixel synthetic aperture digital holographic result from camera scanning and the quantitative enhancement effect of USAF resolution chart [21]
合成孔径激光雷达作为合成孔径雷达的进一步拓展,通过主动发射激光光束并接收辐射到目标上反射的回波来实现对目标的精确测距与高分辨率成像[22]。相比于合成孔径数字全息术,合成孔径激光雷达在更受军事探测等领域受到关注。同时,受合成孔径激光雷达思想的启发,逆合成孔径激光雷达[23](inverse synthetic aperture lidar,ISAL)也随之被提出,只是原本通过移动探测端实现不同频率信息模式采集转变为通过记录目标运动场信息来捕获孔径外高频成分。合成孔径激光雷达的原理如图6 所示,与利用干涉获取相位的可见光合成孔径技术存在同样的需求,要想利用合成孔径激光雷达实现高分辨率探测,必须获取探测目标的精确相位信息以实现孔径合成,这意味着要实现激光雷达的合成孔径超分辨探测,需要同时探测到信号的幅度信息和相位信息。在实际应用中通常利用外差探测方式获得激光信号的振幅和相位,这本质上是利用本征信号与回波信号进行干涉后,经过光电转换最后得到相位调制项与被测量项,再通过对干涉信号进行解调最后获取带有多普勒频移相位信息和记录有目标强度的原始数据信号。因此,合成孔径激光雷达与全息合成孔径以近似的方式获取了可见光波段的相位,在构建合成孔径远场成像体系时,都可以归于基于相干光调控的干涉式合成孔径成像。
图6 合成孔径激光雷达在相干照明条件进行孔径合成,实现方位向分辨率提升Fig.6 Synthetic aperture lidar achieves azimuthal resolution enhancement by aperture synthesis with coherent illumination
进入21 世纪以后,随着激光技术和光电探测技术的成熟,SAL 得到了极大发展。2002 年,美国海军实验室成功研制了世界上第一个扫描式的二维合成孔径激光雷达系统[24]。严格来说,实验中是通过移动目标实现的合成孔径,因此海军实验室所实现的是逆合成孔径激光雷达。然而,由于需要在图像形成之前预先了解目标范围,因此在实验室外的适用性有限。到2005 年,受到美国海军实验室合成孔径激光雷达系统的启发,Buck[25]设计了一套全光纤结构的合成孔径激光雷达系统,这也是现代合成孔径激光雷达的标志性系统。通过将参考通道数字化,不在实际的系统中加入参考通道。通过建立的模型以及数字信号处理技术补偿非线性相位误差。然而,Buck 所设计的系统依旧存在许多问题,如易受振动和大气影响,对于光源的要求严格,整体系统的稳定度需要保障,以及光束波前控制等。
由于合成孔径激光雷达的信号处理就已十分复杂,同时还需要考虑激光线性调频技术存在频率调谐的非线性积累以及调频速率低的问题,导致通过干涉的方法实现基于相干光调控的远场探测合成孔径成像无法大规模应用。特别是,对目标的散射光信号的强度和相位信息需要进行高精度收集与采样,成像算法必须有效减少相位误差,并对系统不稳定性带来的相位误差进行补偿才能达到理想的精度。另一方面,要想精确获取散射光的相位信息,基于干涉的成像系统往往较为复杂,加之存在大气湍流等影响,高精度的相位探测往往难以实现。如果能摆脱复杂的干涉系统,仅采用强度探测而无需相位探测实现激光合成孔径成像,将会显著降低远场探测的合成孔径成像复杂度,提升其抗干扰能力,成为最为理想的相干光调控合成孔径远场探测手段。
4.2 基于相干光调控的非干涉式合成孔径成像
基于相干光调控的干涉式合成孔径成像作为当前主流的相位获取手段,已经在全息合成孔径以及合成孔径激光雷达中发挥了强大的作用,然而其存在干涉条件复杂、成像光路要求严格以及相位反演精确度等问题,在远场成像中这些问题会被进一步放大。与此同时,在斯坦福大学、麻省理工学院、哥伦比亚大学、杜克大学、南加州大学、微软研究院等国际著名研究机构的学者们推动下,计算成像技术得以快速发展。这种将前端光学调控与后端探测信号处理进行联合设计的技术体系巧妙地对应了合成孔径技术的理论。合成孔径技术正式被纳入计算成像的体系框架中。为了应对基于相干光调控的干涉式合成孔径成像面临的挑战,许多计算成像中的新兴机制被引入到合成孔径技术中,为合成孔径远场成像提供了新的可能性。特别是,可见光的合成孔径技术能在生物医疗领域的计算光学显微成像中获取到高分辨率的无标记成像结果,因此在显微领域大放异彩[26]。在诸多计算光学显微成像技术中[27-29],2013 年由加州理工学院的郑国安等人[30-33]提出了一种大视场高分辨率定量相位计算显微成像技术,能够在不利用干涉的方法进行相位恢复与合成孔径,称为傅里叶叠层显微成像技术 (Fourier ptychographic microscopy,FPM)。在实验中,待测样品被不同角度的照明光束(通常是一个 LED 阵列)依次照射,采集的低分辨率图像基于叠层相位恢复算法实现合成孔径,从而使频谱支持域得到显著提升。
与传统的合成孔径超分辨率算法不同,傅里叶叠层显微成像技术中相位恢复和频域合成孔径在更新算法中同时完成,这一优势也使得它可以在多个应用领域发挥强大的潜能。通常情况下,傅里叶叠层成像技术使用低倍率物镜的低数值孔径来获得大视野,然后使用大角度范围的照明光束在频域中依次照亮样品实现合成孔径[34-35],其具体成像系统以及实验结果如图7 所示。最终图像的等效数值孔径能够提高到物镜和照明的数值孔径之和,同时保持低倍率物镜的大视场,从而实现大空间带宽积。FPM 解决了基于相干光调控的合成孔径成像技术中难以获取可见光信息的相位问题,利用迭代尽可能缩小物函数对应的低分辨率振幅与实际采集的低分辨率振幅的差异,其利用空域和频域的傅里叶变换关系,通过在空域和频域中添加约束条件进行交替迭代,从而不断逼近、收敛至物体的真实复振幅。
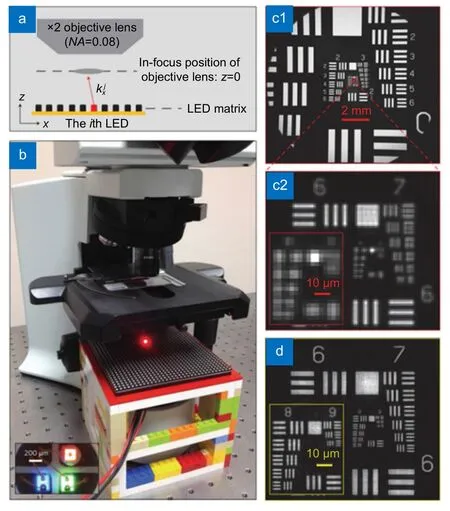
图7 傅里叶叠层显微成像系统以及USAF 分辨率板实验结果[32]Fig.7 Fourier ptychographic microscopy imaging system and experimental results of USAF resolution chart [32]
2014 年,Dong[36]等人改进了傅里叶叠层显微成像系统,新的成像结构中不再采用多角度照明实现频谱搬移,而是直接将成像透镜放置于待成像目标的频谱面,通过小孔扫描分别记录不同位置的目标强度信息,再通过FPM 中对存在一定重叠率的子孔径图像进行相位反演,获得远超出单个子孔径所能获取的频谱信息量,从而将傅里叶叠层方法的成像平台从显微系统拓展至 4f 系统之外,实现了最初理论上的宏观傅里叶叠层成像原理性系统。在Dong 等人的基础上,2016 年由莱斯大学Holloway[37]等将相机阵列与相干调控相结合,利用基于相位检索的重建算法来有效地从多个低分辨率采集图像中恢复丢失的高分辨率细节。利用相机阵列的方法对目标进行合成孔径成像的基本成像思想如图8 所示。然而,由于成像系统在设计上的局限性,如图8(c)所示的设计方案中,宏观傅里叶叠层成像实验只能对物体进行透射成像,即只能通过收集透过物体的散射信息来实现强度图像的记录和孔径合成,这样的限制阻碍了远场高分辨率探测的实现,因为对于远场探测而言,无论是雷达或射电望远镜,其探测系统大多按照收发系统一体的模式进行设计的,以便通过收集物体的反射信息实现成像。要实现如图8(a)以及图8(b)所示的反射式宏观傅里叶叠层成像,需要进一步考虑后向散射光的收集以及物体粗糙表面的影响。
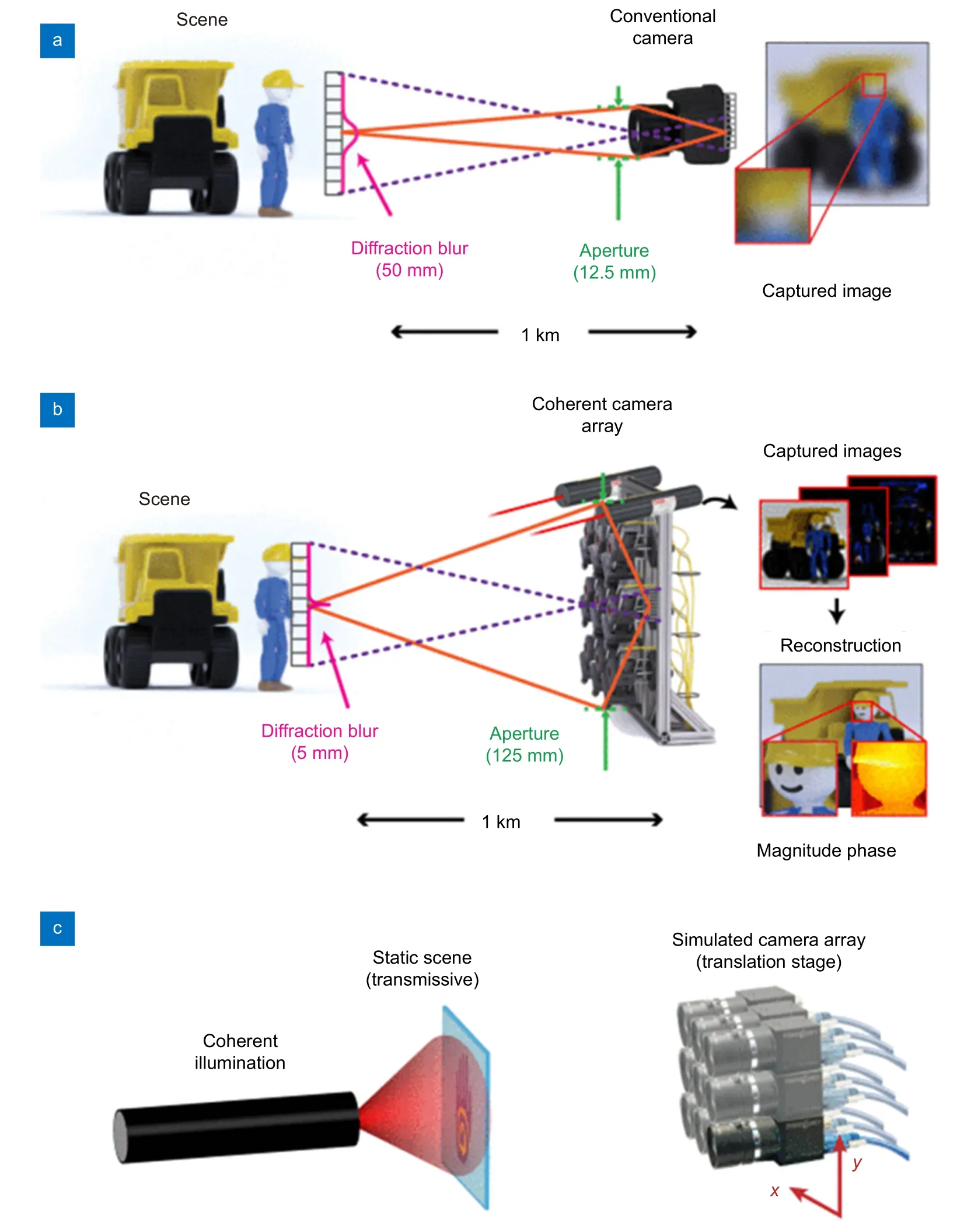
图8 相机阵列傅里叶叠层成像方案示意图[37]。(a)尺寸为12.5 mm 的单个孔径成像方案;(b)利用相机阵列实现125 mm合成孔径成像结果的方案;(c)使用孔径扫描模拟图(b)中的成像方案以获取成效的高分辨率成像结果Fig.8 Schematic diagram of the camera array Fourier ptychography imaging[37].(a) The single aperture imaging scheme with a size of 12.5 mm;(b) The scheme to achieve 125 mm synthetic aperture imaging results using the camera array;(c) The imaging scheme in (b) using the aperture scanning to obtain effective high-resolution imaging results
根据Sun 等人[38]在傅里叶叠层显微成像中所提出的采样理论,基于叠层重建的合成孔径成像系统至少要保证35% 的频域子孔径重叠百分比才得以满足子孔径间相位检索与重建。Holloway 用于分辨率提升实验的概念验证系统利用二轴位移台以孔径扫描的方式重建高分辨率图像,重建结果相比于低分辨率图像的分辨率提升接近7 倍,进一步证实宏观傅里叶叠层成像在远场探测中的可行性。2017 年,Holloway[39]进一步提出基于傅里叶叠层成像的远距离、亚衍射极限的合成孔径可见光成像技术(synthetic apertures for long-range,subdiffraction-limited visible imaging using fourier ptychography,SAVI),真正意义上对含有粗糙表面的漫反射物体实现了基于宏观傅里叶叠层的合成孔径成像。其系统结构如图9 所示。在1 m 的距离下,光源发出激光通过空间滤波器,照射探测目标后,通过移动相机实现不同角度下的频率信息获取。

图9 基于傅里叶叠层成像的远距离、亚衍射极限可见光成像[39]。(a) 成像示意图;(b) 实际搭建的1 m 成像距离下的系统结构图Fig.9 Synthetic apertures for long-range and subdiffraction-limited visible imaging using Fourier ptychography[39].(a) Imaging schematic;(b) Structural diagram of the system at 1 m imaging distance
与传统的基于干涉相干合成孔径(如SAL)成像技术不同,宏观傅里叶叠层成像技术虽然采用相干激光照明,但不采用干涉的方式对散射场的强度和相位进行直接探测,而是利用一定重叠率的子孔径在频域中迭代更新,恢复目标不同的空间频率的振幅与相位成分,在非干涉条件下实现合成孔径超分辨率成像。其基本成像思想为在相干光照明下,利用多个小孔径低分辨率的相机阵列获取的强度图像实现一个大孔径高分辨率相机的成像结果。
当SAVI 成像系统在满足夫朗禾费衍射条件的情况下(成像距离do≥2D2/λ,其中D为孔径尺寸),反射后光场在成像透镜经历一次傅里叶变换后从成像透镜出发,再经过菲涅尔衍射,从而在传感器上被记录,在这样的条件下,探测器上获取的图像信息不存在二次相位因子影响。当成像距离不满足夫朗禾费衍射近似时,SAVI 在成像系统中加入聚焦透镜作为解决方案,借助于光通过透镜的一次傅里叶变换将菲涅尔衍射区形成的二次相位因子抵消[40],探测器上形成的光场分布就能够与夫朗禾费近似下的分布保持一致。在此基础上,Holloway 针对成像透镜的相差问题,利用了ePIE 算法[41]在恢复目标相位的同时并行恢复光瞳函数[41],获取了高分辨率和高成像质量重建结果的同时加快迭代收敛速度。经分辨率板的定量评价实验可以得到合成孔径后成像结果的可分辨线,由低分辨率图像的1.26 lp/mm 提升到了7.13 lp/mm,将分辨率提升了将近六倍。对USAF 分辨率板的重建结果如图10 所示,分别对比了子孔径的低分辨率图像、短曝光平均结果以及旋转漫射体成像结果,证明了利用宏观傅里叶叠层能够获取高分辨率、高信噪比的成像结果。

图10 USAF 分辨率板实验结果[39]。(a) 分别为子孔径直接成像结果、短曝光平均结果,旋转漫射体成像结果以及合成孔径、合成孔径去噪结果;(b) 五种方法的成像结果区域放大;(c) 可分辨线对与对比度曲线图;(d) 合成孔径尺寸与散斑尺寸曲线图Fig.10 FP for improving spatial resolution in diffuse objects[39].(a) Resolution of a USAF target under coherent light under various imaging modalities;(b) Magnified regions of various bar groups recovered by the five techniques;(c) Contrast of the bars as a function of feature size;(d) Speckle size and resolution loss are inversely proportional to the size of the imaging aperture
基于傅里叶叠层的非干涉合成孔径成像技术为新一代“宽视场、高分辨”的智能探测与感知奠定了理论基础与技术支撑。以此为开端,基于相干光调控的非干涉式合成孔径成像迸发了新的可能,从中涌现大量的研究方向,值得我们进一步探索。当然,以非干涉作为合成孔径中相位获取的方法也伴随着对应的挑战,例如孔径位置与原位置之间的误差、低时间分辨率、散斑噪声、成像距离的进一步提升等。此外,宏观傅里叶叠层成像技术作为相干光调制的主动合成孔径技术,在远场成像中依旧存在大气湍流、能量衰减后对相位的准确恢复等问题。因此,目前众多课题组正逐步解决基于相干光调控的非干涉式合成孔径成像技术发展中的存在的技术问题,努力完成相应体系的构建。
4.3 基于相干光调控的非干涉式合成孔径成像的后续发展
4.3.1 基于高精度子孔径校正的合成孔径成像技术
在非干涉式合成孔径成像系统中,大多采用二轴位移台带动相机进行孔径扫描实现子孔径图像的获取。每一幅原始低分辨率图像都由不同位置子孔径采集得到,而当孔径扫描过程中存在定位误差时,这些扫描位置对应的频域子孔径位置也会出现偏差,这在傅里叶叠层显微技术中出现时会影响重构图像质量,定位误差如图11 所示。特别是,由于定位误差导致原本的暗场图像变为明场图像时,重构结果更是严重扭曲。因此陆续有位置校正算法被提出用以提升重建精度。在傅里叶叠层显微技术的发展中就已经诞生了许多方法,例如2016 年Sun[42]等人提出了基于模拟退火算法和非线性回归法的傅里叶叠层成像LED 位置校正算法(PcFPM)。该方法也是目前应用在傅里叶叠层显微成像领域中的经典算法,先利用模拟退火法校正频域中每一个LED 对应的子孔径中心位置,然后利用LED 板的空间位置模型以及非线性回归算法对LED板的定位参数进行更新。Sun 在仿真与实验中均表明该算法能在重构迭代过程中准确地校正系统中每个LED 的位置误差,避免由于LED 位置误差导致成像质量下降。
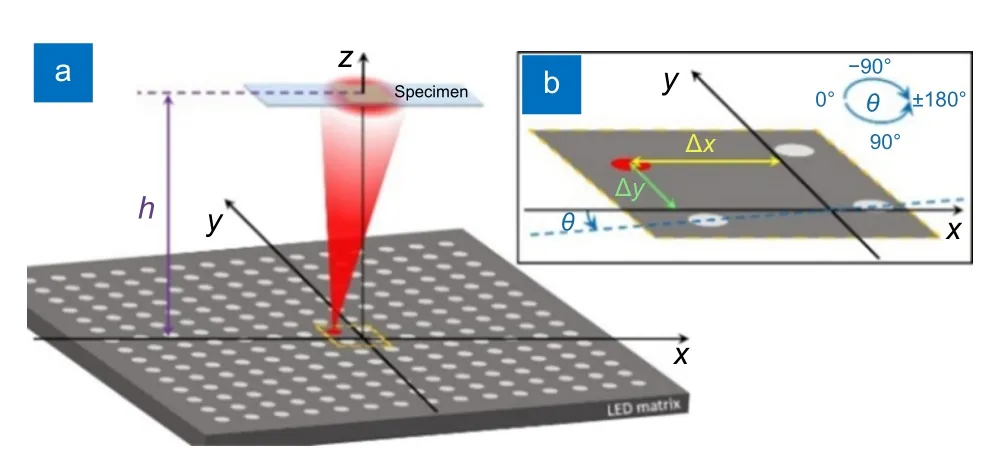
图11 傅里叶叠层显微系统中在LED 阵列上存在的定位误差示意图[42]。(a) X-Y 平面上的误差;(b) 由于LED阵列存在的角度偏移导致的位姿偏差Fig.11 Schematic diagram of the positioning errors present on the LED array in the Fourier ptychographic microscopy system [42].(a) Errors in the X-Y plane;(b) Pose misalignment due to the angular offset of the LED array
显微成像中默认LED 阵列间距相同,因此可以引入全局收敛模型来校准波矢位置,但是在远场孔径扫描过程中,相机间距存在不确定性,应用在显微成像中的校正算法并不能精确定位孔径扫描正确的位置。为了解决远场合成孔径的定位问题,北京理工大学郝群教授[43]提出一种相机标定和单应变换的相机扫描傅里叶叠层方案,通过在相机标定过程中建立变换的函数模型,利用单应变换对原始数据集进行对齐,解决了目标因为相机位姿变化引起的像素偏移问题。使用相机标定以解决每个扫描位置中目标和相机之间的相对位姿问题,最后将提取出的位置偏移强加在重建过程中,去除了由位置偏移引起的重建结果中的伪影,实现高质量的非干涉远场合成孔径成像。
除此之外,大连海事大学赵明等人[44]提出基于深度学习的位置校准算法,通过将目标的实部和虚部以及每个孔径的位置偏差作为卷积层权重,实现孔径位置的精确定位。此外,中国科学院长春光机所的何承刚等人[45]利用粒子群优化算法(particle swarm optimization),采用逐点校准策略,在频域中对部分含有低频信息的图像进行校准并更新频谱,然后对全部低分辨率图像进行迭代校准,获取精确位置后再通过相位恢复算法重建出高分辨率图像,相较于同类算法能够将运行消耗时间减少10.9%以上,有效解决了宏观傅里叶叠层成像技术对相机扫描位置精度严苛的需求,提升重建图像质量,减少时间成本。
4.3.2 基于稀疏孔径及相机阵列的高时间分辨率合成孔径成像技术
Sun 等人基于傅里叶显微叠层成像在图像采集中相位恢复和约束的情况,确定了傅里叶叠层成像只有重叠率大于35%才能实现不影响成像质量的相位恢复与合成孔径成像。而为了对远场漫反射物体进行高分辨率成像,用于宏观傅里叶叠层成像的重叠率需要进一步提升。Holloway 在SAVI 的实验中为了实现粗糙分辨率板6 倍的分辨率提升,以72%重叠率为标准采集了总共361 张低分辨率图像进行重建,获取一张高分辨率图像的时间接近1 小时。对于非合作目标而言,持续的运动需要更高的时间分辨率以便更准确地记录状态变化的目标高分辨率图像,而目前的孔径扫描方案显然无法在保证重叠率的前提下对运动目标进行成像。
2022 年由亚利桑那大学的Wang 等人[46]提出的相干孔径合成技术将单个快照式成像系统应用在非干涉远场合成孔径成像中,利用了4×4 的相机阵列以及卷积神经网络,恢复图像的分辨率相比于单个子孔径低分辨率图提升了6.7 倍,实现了单次曝光下的非干涉远场合成孔径成像。此外,清华大学的吴佳琛等人[47]利用全变分正则化(total variation regularization)的方法对频谱施加先验,将合成孔径的重叠率要求降低到了25%,如图12 所示,在一定情况下,利用全变分正则化的方法能够对零重叠率情况下的子孔径图像进行傅里叶叠层重建,实现高分辨率图像的快速获取。
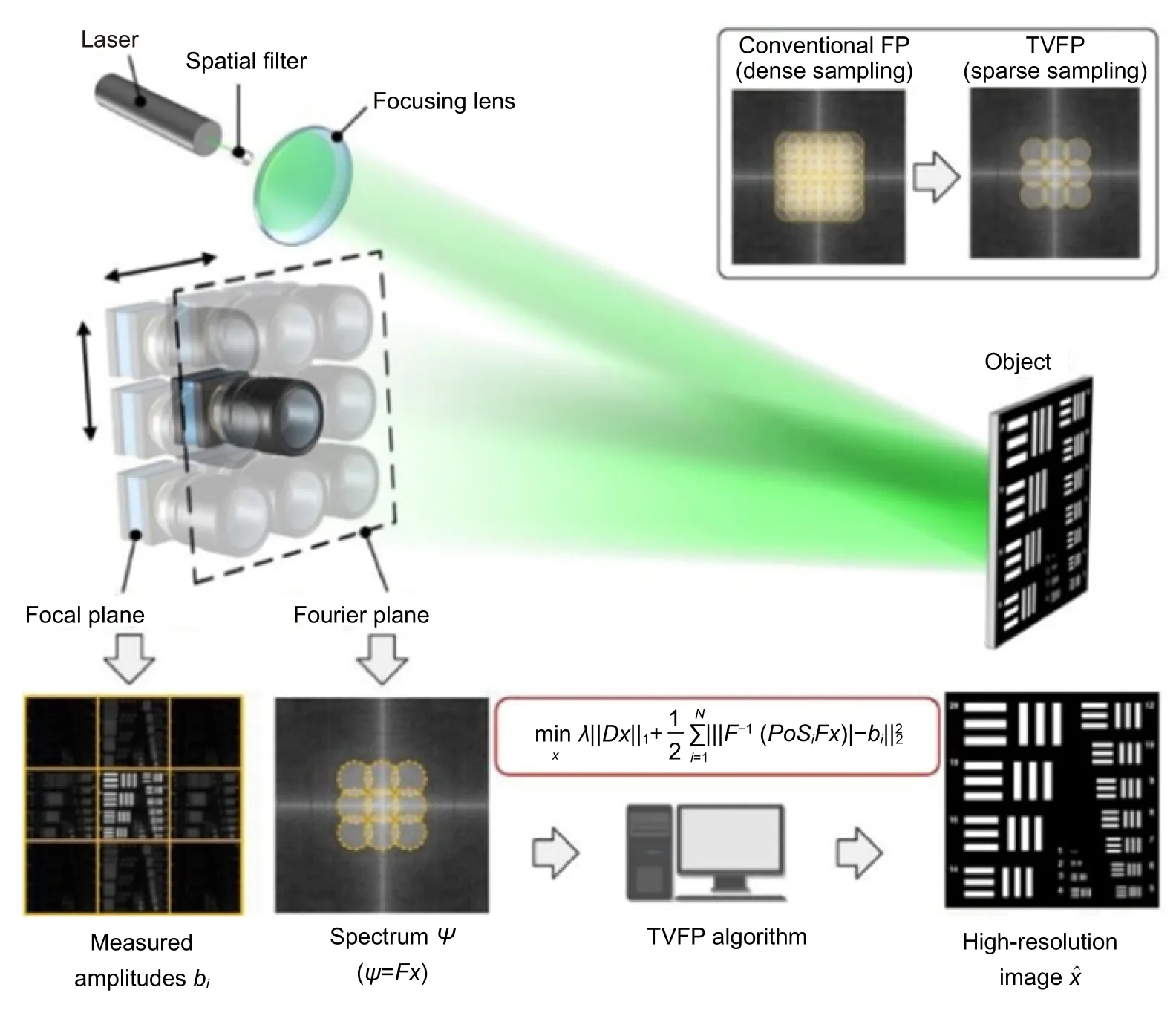
图12 基于TV 正则化宏观傅里叶叠层成像系统示意图[47]Fig.12 Schematic diagram of the macroscopic Fourier ptychography imaging system based on TV regularization [47]
本课题组也在提升非干涉光学合成孔径成像时间分辨率方面开展了相关工作[48],通过相机阵列记录非重叠区域的低分辨率强度图像,采用基于物理模型的双回归深度神经网络,合成重建得到超分辨率高质图像。与传统的宏观傅里叶叠层成像相比,提出的方法克服了对具有高频谱重叠率的原始数据的严格要求,实现了漫反射表面物体的高分辨率、高信噪比成像,使单次曝光下远场合成孔径成像成为可能,并首次实现基于傅里叶叠层成像技术的远场动态超分辨成像(30 f/s),动态成像结果如图13 所示。
4.3.3 基于重建过程优化的高信噪比合成孔径技术
由于相干光在粗糙物体表面反射引起的散斑现象是影响相干成像质量的主要原因,即光束在粗糙表面照射后作为二次光源反射,在传感器上获取的图像会出现明显的斑点[49]。理论上来讲,散斑噪声与高斯噪声、脉冲噪声等传统噪声不同[50],散斑在被传感器记录时依旧携带了物体的高频信息。在全息成像技术中,散斑噪声能够通过降低照明的空间相干性或者利用波长多样化以及多角度拍摄得到抑制,属于光学领域的去噪方法。将光学领域的去噪方法应用于基于相干光调控的非干涉式合成孔径成像中尽管会缓解散斑噪声的影响,但是也会对重建结果产生干扰以至于无法获得理想的分辨率提升。除光学去噪方法以外,也有直接利用数字图像去噪的方法而不考虑其光学成像过程,例如中值滤波法以及效果强大的BM3D 算法[51]。只不过数字图像去噪方法大多都针对单张图像的散斑噪声进行一定的抑制,无法在利用多张低分辨率图像进行的合成孔径重建过程中使用。
针对散斑噪声的进一步抑制问题,近年来研究人员试图将光学去噪方法与数值去噪方法相结合,实现去噪效果更明显的合成孔径成像结果。西安光学与精密机械研究所的李志新等人[52]在重建过程中加入重新加权振幅流(reweighted amplitude flow,RAF),同时结合去噪正则化(regularization by denoising,RED)对散斑噪声实现约束,同时能对高斯噪声、泊松噪声以及散斑噪声进行去噪,实现高信噪比宏观傅里叶叠层重建结果的获取。Shamshad[53]于2019 年提出了Deep ptych,通过图像的自适应生成先验进行子采样的傅里叶叠层成像,在定量指标和视觉质量方面有了较大提升。2022 年Li 等人[54]提出了将散斑去噪与深度解码器进行正则化的散斑噪声抑制方法(RAF-REDDD),该方法本质上是一种未经训练的深度生成模型,无需任何数据集就能获得高质量的高信噪比重建结果。
4.3.4 基于单光子和平面波照明的远距离合成孔径成像技术
在宏观傅里叶叠层成像技术中,成像距离增加会引起照明光能量衰减,特别是当成像距离提升到公里级别时,现有的探测器已经无法响应微弱的光子信号,如何在极少量光子的条件下获得高质量图像,是光电成像系统研究的基础性难题,也是推动光学成像不断向更大视场、更远作用距离、更高信息通量发展亟待克服的关键技术。此外,宏观傅里叶叠层成像技术中所使用的球面波具有会聚特性,从聚焦透镜传播的光束照明视场会随成像距离增加而急剧减小,因此成像距离与可探测视场存在明显的互相制约。
针对远场微弱光子探测灵敏度问题,单光子成像技术的发展及单光子雪崩器件 (SPAD)成像水平的日益提升,也催生了二者的有机结合。杜克大学Yang等人[55]利用SPAD 相机实现基于单光子相机阵列的傅里叶叠层成像探测,通过采用改进的FP 重建算法,从获取的二进制强度测量中重建具有更高分辨率及更大动态范围的合成孔径图像。通过对分辨率板的定量实验,将图像分辨率提升三倍,实现了通过二进制子孔径图像完成高动态范围和高分辨率成像结果的重建,进一步拓展了利用SPAD 相机等高灵敏度成像器件与合成孔径成像技术相结合的成像方案实现远场微弱信号探测的可行性。
另一方面,针对成像距离与视场的固有矛盾问题,本课题组也提出了基于准平面波的非干涉远场合成孔径方法[56]。结合平面波的特点与傅里叶叠层成像的思想,避免光束能量快速衰减的同时保留了最大的成像视场,利用本课题组所提出的方法能够在远距离的情况下实现大视场、高分辨率的成像结果,同时能够对粗糙表面的漫反射物体进行高分辨率重建。相比于以往的远场合成孔径成像工作,本课题组利用脉冲激光器搭建了实际的反射式成像系统,对常见的漫反射物体可实现高分辨率高信噪比成像,对扑克牌的成像实验及对应结果如图14 所示,对比了单个子孔径的成像结果以及多角度低分辨率图像多帧平均的处理结果,利用子孔径图像序列重建的结果体现了更多细节信息。在成像距离为12 m 的情况下,结合非干涉光学合成孔径成像技术相较于单孔径成像分辨率提升8 倍,进一步拓展了基于相干光照明下叠层合成孔径成像方案的作用距离与成像分辨率。进一步结合高功率脉冲激光及高灵敏探测器,可将成像距离拓展至公里级。
总体看来,自2017 年Holloway 为非干涉合成孔径成像技术提供合理实现的可能性后,国内外学者都进一步在非干涉光学合成孔径成像领域开展相关工作,希望将其发展为与激光合成孔径雷达和光学合成孔径雷达并肩的成熟技术体系。但目前结合相干光照明的非干涉合成孔径成像技术还处在探索阶段,现阶段在提升空间分辨率、灵敏度、成像帧频及探测距离方面值得研究人员进一步引入创新思想实现该领域的突破。因此,目前也有部分研究人员考虑将连续的光纤激光器换为脉冲激光器,试图通过将光源修改为更符合远场探测的模式,从而开辟远距离非干涉合成孔径的另一条思路。另一方面,从如何降低散斑噪声对成像质量的影响方面考虑,目前的解决方案大多倾向于通过引入后处理算法抑制探测器上的斑点对重建结果的影响,而如何利用相干散斑中的高频信息,进一步重建得到接近于无散斑噪声情况下的理想高分辨率成像结果,也不失为远场非干涉合成孔径技术另一个发展方向,值得相关研究人员进行进一步探讨。
5 基于非相干光远场被动合成孔径成像
5.1 经典的非相干远场合成孔径成像
在合成孔径技术提出之初,研究人员就思考了将其应用在天文望远镜等大型成像系统的可能性,而要实现对遥远星球的高分辨率成像,通过主动发射相干光进行调控的方式会面临成像距离过远而能量不足的问题。因此非相干合成孔径技术在天文望远镜等领域进行了大量研究。另一方面,由于相干光调制的合成孔径技术属于主动探测领域,应用在军事战争中极易造成探测行动被敌方察觉等缺点,因此亟需应用在军事等领域上的非相干合成孔径技术,通过利用阳光、月光等天光实现合成孔径技术是当前相关研究领域的热点问题。恒星干涉技术实现星体测量给予了非相干合成孔径技术的研究方向与主要思路,非相干合成孔径技术主要采用多路并行干涉的方式实现,系统通常由一系列排布于不同空间位置的子孔径构成,光信号由子孔径收集后通过严格的光程控制最终在探测器平面产生干涉合成并记录。根据干涉合成方式的不同,非相干合成孔径通常可以分为迈克尔逊型(Michelson)干涉与菲索型(Fizeau)干涉两种,Fizeau 型又具有两种常见结构,分别为共次镜结构与多望远镜结构(或称相控阵结构),如图15 所示。

图15 非相干合成孔径的典型结构Fig.15 Typical structure of incoherent synthetic aperture
5.1.1 Fizeau 型合成孔径
早期的光学合成孔径研究主要围绕Fizeau 型干涉结构展开,其核心思想是利用一系列特定排布的子孔径构建虚拟的主镜面,从而提升系统的等效孔径尺寸。在成像原理上,Fizeau 型合成孔径与一般的成像系统一致,均由主镜面汇聚入射光形成目标的图像并通过传感器记录,因此其极限分辨率与等效主镜面的孔径尺寸相关。世界上第一台基于合成孔径光学成像技术的天文望远镜于1978 年由美国亚利桑那大学建立,命名为Multiple-Mirror Telescope (MMT)[57],采用的是多望远镜结构(图16(a,b)所示),通过6 个直径为1.8 m 的子望远镜组合,等效孔径能够达到4.5 m,但由于MMT 的成像视场较小,所以成像效果不佳,最终被1999 年新修建的MMT 望远镜[58]替代,对应等效口径也提升至6.5 m。

图16 Fizeau 型合成孔径望远镜。(a) 多镜面望远镜;(b) 多镜面望远镜的结构示意图[57];(c) 詹姆斯·韦伯太空望远镜;(d) 詹姆斯·韦伯望远镜结构示意图[59]Fig.16 Synthetic aperture of Fizeau interferometer.(a) Multi-mirror telescope (MMT);(b) Schematic diagram of the MMT[57];(c) James Webb space telescope (JWST);(d) Schematic diagram of the JWST[59]
2021 年12 月发射升空的詹姆斯·韦伯太空望远镜(James Webb space telescope,JWST)[59]是典型的共次镜结构合成孔径望远镜,如图16(c,d)所示。其主镜面由18 片六边形的子镜面拼接而成,尺寸达到6.5 m,是目前孔径尺寸最大的太空望远镜。国内采用镜面拼接的合成孔径系统以2009 年的大天区面积多目标光纤光谱天文望远镜 (large sky area multi-object fiber spectroscopy telescope,LAMOST)为代表,同时也有南京天文台的苏定强院士和崔向群院士与世界同步开展30-100 m 中国未来巨型望远镜(CFGT)方案。
Fizeau 型合成孔径系统子孔径排布方式决定了系统的调制传递函数 (modulation transfer function,MTF)。对于稀疏合成孔径系统,MTF 通常面临中频下降或缺失的情况,导致图像质量下降。从孔径排布设计角度,1971 年Golay 利用信息理论提出的无冗余最优Golay 结构[60],以及1988 年Cornwell 以最大频率覆盖为准则设计的Cornwell 分布[61],是目前存在的两种经典的稀疏孔径布局方案,具有较全面的空间频率覆盖。其中,Golay 结构的孔径数为3 的整数倍,每组三个孔径均匀分布在一个圆周上,而各组孔径所在圆周的半径不同,如美国麻省理工学院空间系统实验室的自适应Golay-3 光学卫星[62]就是利用了3 个0.21 m口径的子镜组成,实现了0.62 m 的等效口径。
此外,图像复原算法是解决MTF 中频下降问题以改善图像质量又一方案。自二十世纪50 年代图像复原技术兴起后,科研人员针对图像复原问题提出了许多方法。1996 年,Bell 和 Boucher 提出采用图像复原方式补偿光学稀疏孔径系统的MTF 的中频分量[63];2002 年Fienup 对比了维纳滤波和非线性最大似然复原算法,分析了不同方案的复原效果[64]。国内在此之后也进行了相关方面研究跟进,2007 年南京理工大学的陶纯堪、朱锡芳等人将传统的维纳滤波算法应用于光学稀疏孔径图像复原[65],谢宗良等人于2017 年改进了空间调制相位差法[66],实现了受噪声严重影响的微弱目标的波前重建,并在随后的工作中通过随机并行梯度下降算法针对稀疏孔径的活塞误差进行了矫正。除此之外,也有线性最小二乘滤波以及Lucy-Richardson 反卷积等方法进一步解决成像模糊问题。但是这些非盲算法需要点扩散函数(PSF)或OTF 等先验信息作为卷积核,导致大多数算法在实际中应用困难。2021 年,邸江磊[67]等人提出了基于RestoreNet的光学合成孔径成像框架,利用深度学习在图像恢复中的强稳定性和泛化性,无需卷积核就能够去除光学合成孔径图像的模糊。
5.1.2 Michelson 型合成孔径
Michelson 型干涉结构是基于恒星光干涉技术发展而来的,两者均以部分相干理论中的范西特·泽尼克定理(Van Cittert-Zernike Theorem)作为探测的理论基础。该定理给出了部分相干光场中远距离目标强度分布与复空间相干度之间的关系。但不同于恒星干涉仪,Michelson 干涉结构通过改变基线的长度与指向多次测量以填充目标空间频谱,结合傅里叶逆变换能够重构目标的二维强度分布。
尽管通过干涉测量获取目标信息的方法早在1868 年就由Fizeau 提出并在20 世纪由Michelson 验证,但相较于波长更长的射频波段,基于这一原理的光学合成孔径成像技术在实现上却异常困难。2012年由欧洲南方天文台完成建造的甚大望远镜干涉仪(very large telescope interferometer,VLTI)[68-69],是光学波段采用干涉测量的实现合成孔径成像的代表性成果(图17 所示)。VLTI 由4 台8.2 m 位置固定的子望远镜与4 台1.8 m 的可移动的辅助望远镜构成。子望远镜可以作为单独的望远镜使用,也可以两两间构成光学干涉仪进行高分辨观测,最大基线长度可达130 m,辅助望远镜的引入增加了干涉基线的数量,提高频谱覆盖率,从而改善成像质量。
图17 欧洲南方天文台的甚大望远镜干涉仪[67-68]Fig.17 Very large telescope interferometer (vlti) of the european southern observatory (ESO)[67-68]
上述基于多路并行干涉的非相干合成孔径探测技术均较为成熟并在天文观测等领域广泛应用。但相关技术也存在一些共性的问题,限制了其进一步的发展与应用。首先,尽管将等效的大孔径系统分解为若干子孔径避免了大尺寸光学元件在加工制造上的难题,但是系统最终所能达到的分辨率仍然与系统的整体尺寸有关(Michelson 型由基线长度决定,Fizeau 型由虚拟主镜孔径决定),含有每个子孔径的整体系统仍然体积庞大。其次,无论采取何种干涉结构,多路光信号的并行干涉是成像或测量的必要环节,要求各路光信号严格满足等光程要求,无疑给系统的结构设计与装调提出了巨大的挑战。特别是,对于共相探测技术中各子镜的共相实现难度大。其中,子镜沿光轴方向(z轴)的平移误差(波前Piston 误差)和绕x、y轴旋转的倾斜误差(波前 Tip-tilt 误差)对共相的影响最显著。因此,为了提高非相干合成孔径探测技术的成像质量,除了进一步提高共相探测的精度外,还可以通过相位反演来直接获取当前相位信息以实现高精度非相干合成孔径探测。
5.2 新兴的非相干远场合成孔径成像
近年来,随着信息光学、计算光学、现代信号处理等领域的快速发展与交叉,一些新型的非相干合成孔径探测技术也相继被提出。相较于上述传统的干涉型合成孔径被动成像技术,这些技术在基本原理、成像模式、实现方式等方面给出了全新的思路,有望实现轻量化的非相干合成孔径探测系统。
5.2.1 分段式平面干涉成像技术及其发展
2013 年美国洛克希德·马丁公司提出了一种用于光电探测的分段式平面干涉成像技术(segmented planar imaging detector for electro-optical reconnaissance,SPIDER)[70-71]。第一代SPIDER 的概念模型及分解图如图18(a)所示,系统主要由透镜阵列、光子集成电路(photonic integrated circuit,PIC)以及后端数据处理系统构成。透镜阵列呈辐射状分布,每一辐条后对应一片PIC,光信号由透镜阵列耦合进入对应的光子集成电路并产生干涉,位于同一辐条的透镜两两构成长度不一的干涉基线对,能够采样覆盖频谱中对应方向不同频率的分量。不同方向分布的PIC 又对频谱不同方位角采样覆盖,最终达到对目标成像的目的。如图18(b)所示为单片PIC 的内部结构,其中集成有光耦合器、阵列波导光栅、相位调制器等结构,分别用于入射光的耦合,不同波长分量的分光、干涉测量等。
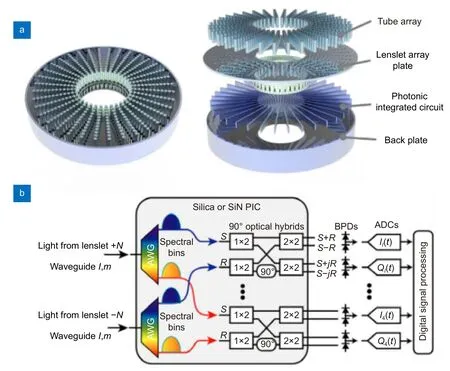
图18 (a) 初代SPIDER 概念模型及分解图;(b) PIC 内部结构示意图[70]Fig.18 (a) Primitive SPIDER conceptual model and decomposition diagram;(b) Schematic diagram of the internal structure of the PIC[70]
在基本原理上,SPIDER 与传统迈克尔逊干涉结构的被动合成孔径技术均采用孔径间干涉测量的方式进行频谱采样以实现目标的间接成像。而在实现方式上,传统的迈克尔逊干涉结构采用大尺寸凹面镜作为子孔径收集光信号,并通过严格的等光程控制使其在探测器平面上产生干涉,受限于干涉基线对的数量,通常需要改变基线对的长度、指向等进行多次测量,才能够满足成像所需的频谱采样覆盖。SPIDER 技术中则采用了轻量化的PIC 作为干涉测量的基本元件,且能够实现对频谱不同分量的并行测量,通过单次测量即可重建出目标的强度分布,这也正是SPIDER 技术相较于传统被动合成孔径成像的优势所在。SPIDER 技术自提出以来就受到了各国学者的广泛关注,但洛克希德·马丁公司提出的原始分段式平面干涉成像技术依然存在透镜阵列结构影响频谱覆盖率等问题。随着SPIDER 技术在合成孔径研究领域内熟知,相关改进工作也陆续得到报道,主要可以分为三个方面:
首先是透镜阵列结构优化方面,提出了各种透镜阵列排布结构与基线配对方案,以提升频谱覆盖率,优化图像重建质量。如上文所述,透镜阵列排布结构与基线配对方案决定了频谱的覆盖范围,单片PIC 上有限的透镜数量只能对频谱进行有限的离散采样,如何合理分配不同频谱区域的覆盖是一个值得讨论的问题。同时,对于初代SPIDER 的辐射状透镜阵列排布设计,有限的PIC 数量只能产生稀疏的方位角采样,这一点在高频部分尤为明显。如图19 所示为各种改进后的透镜阵列排布结构。为提高中低频信息的采样效率,西安电子科技大学课题组[72-73]先后提出了分层多级的透镜阵列以及非均匀多级采样的透镜阵列,如图19(a)所示,通过改变透镜半径,实现了对不同频率分量选择性采样。
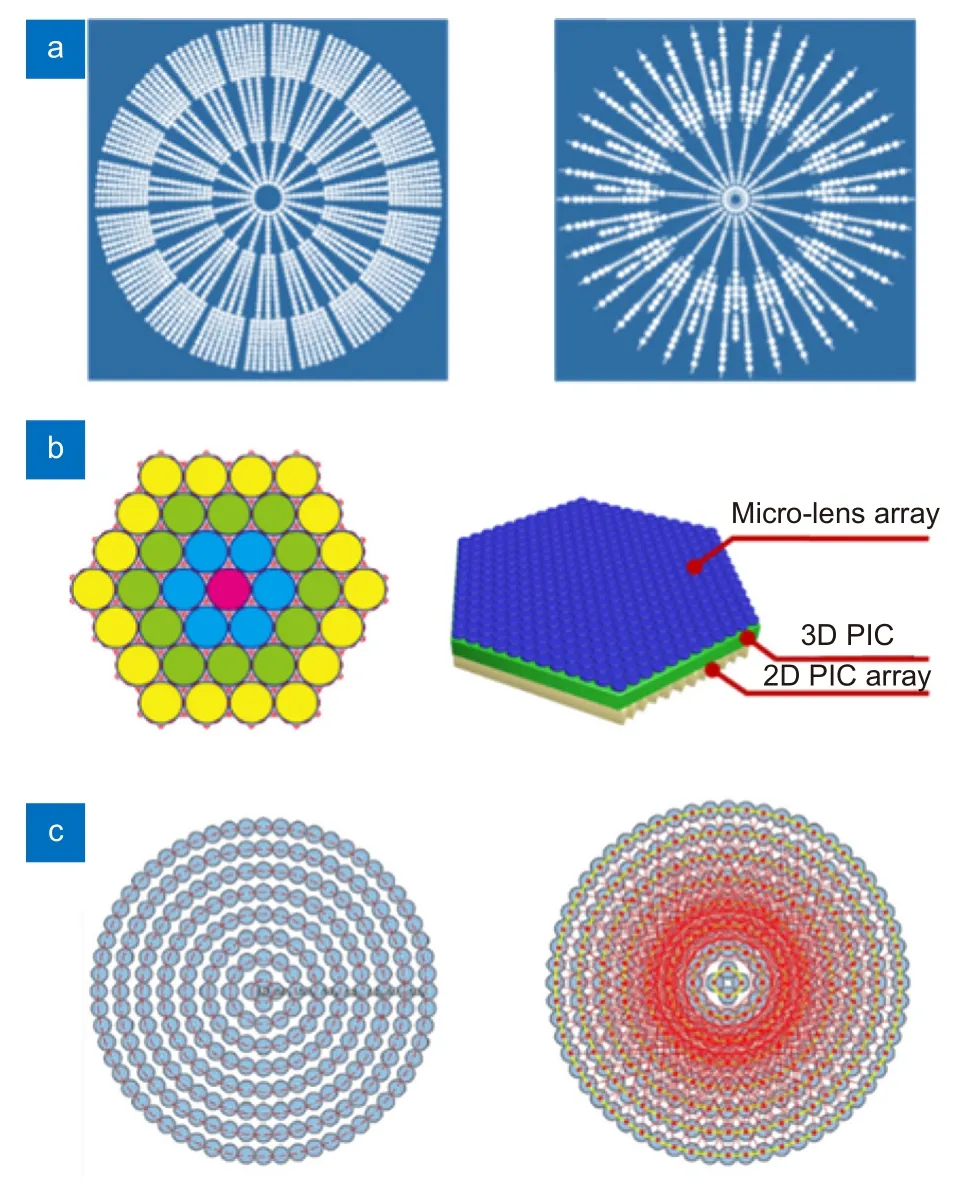
图19 (a) 分层多级透镜阵列与非均匀分层多级透镜阵列[72-73];(b) 六边形阵列结构及其三维结构模型[74];(c) 等间距同心环排布的透镜阵列及其基线配对方式[75]Fig.19 (a) Hierarchical multistage lens array with non-uniform hierarchical multistage lens array[72-73];(b) Hexagonal array structure and its 3D structure model[74];(c) Equally spaced concentric ring arrangement of the lens array and its baseline pairing method[75]
复旦大学课题组[74]打破了传统辐射状透镜排列方式提出了六边形阵列结构如图19(b)所示,用以解决由于透镜采样间隔过大引起的采样率不足的问题,并针对径向基线与横向基线给出了两种不同的配对方案,可以根据所需频段进行选择。图19(c)所示为长春光学精密机械与物理研究所课题组[75]提出的一种呈等间距同心环排布的透镜阵列结构,配合设计的特定的基线配对方式,能够实现频谱的均匀覆盖。
另一类优化重建图像质量的方法是从重建算法出发的。西安光学与精密机械研究所的课题组[76-77]将压缩感知理论与SPIDER 技术结合,能够将干涉后的波导输出减少至两路,简化了数据采集结构,减轻了数据传输负担。长春光学精密机械与物理研究所的课题组[78]将图像的重建转换为最优化过程,并以修正熵作为代价函数,采用牛顿法进行求解,能够有效抑制高频缺失带来的振铃效应。浙江大学的陈跃庭课题组[79]提出了一种基于深度学习的重建算法,利用空间-频率双域融合网络进行图像重建,重建图像的PSNR 与SSIM 较原始重建图像有显著提升。
PIC 作为SPIDER 技术的核心组成部分,其设计与实现也备受关注。据目前的报道,PIC 在设计上已经经历了两代更迭,如图20 所示。第一代PIC 仅4路信号输入,构成2 对干涉基线,每条基线在做3 路分频,单次干涉可以测量频谱中的6 个分量[80-82]。研究人员通过实验验证了其在干涉测量上的有效性。相较于第一代,第二代的PIC 在规模上得到大幅提升,共包含12 对干涉基线、18 路分频,同时采用基于Si3N4的三层结构,能够在保证低串扰的同时,增加器件的集成度[83-85]。第二代PIC 能够在频谱的单个方位有更好的覆盖,通过转动目标或者PIC 就可以对目标二维频谱进行采样,重建的图像可以保留部分细节信息。
各项研究工作推动着SPIDER 技术由理论概念逐步走向成熟,在透镜阵列结构优化与重建算法改进上的工作一定程度缓解了SPIDER 技术由于稀疏频谱采样带来的空域混叠与像质降低的问题,但上述方案主要还停留在仿真验证阶段,在实际应用中复杂环境下的表现还有待验证。另一方面受限于目前的PIC 技术的发展情况,要实现大规模、高集成度的平面干涉成像系统仍然充满挑战。
5.2.2 基于非相干全息的合成孔径技术及其发展
非相干全息是实现被动合成孔径探测的另一条路径。2007 年Rosen 与Brooker 将非相干点源全息与相移技术结合提出了非相干照明下的数字全息[86],该技术借助自干涉记录非相干物体的点源全息图,并采用相移算法从多帧干涉图像中求解非相干光场的波前信息,进而重建目标的强度分布。
2010 年Rosen 与Katz 等将合成孔径技术与这一技术相结合,提出了基于菲涅尔关联全息的合成孔径成像技术(synthetic aperture with fresnel elements,SAFE)[87-88]。如图21(a)所示,该技术将空间光调制器(Spatial Light Modulator,SLM)划分为多个子区域作为子孔径,分别加载菲涅尔干涉图案的对应区域作为相位调制函数,再利用探测器记录对应的子孔径干涉图案。重建过程中,将子孔径干涉图案拼接得到完整全息图,并基于完整全息图重建目标的强度分布,这一过程与非相干数字全息重建一致。由完整全息图重建得到的目标图像保留了更多的细节信息。
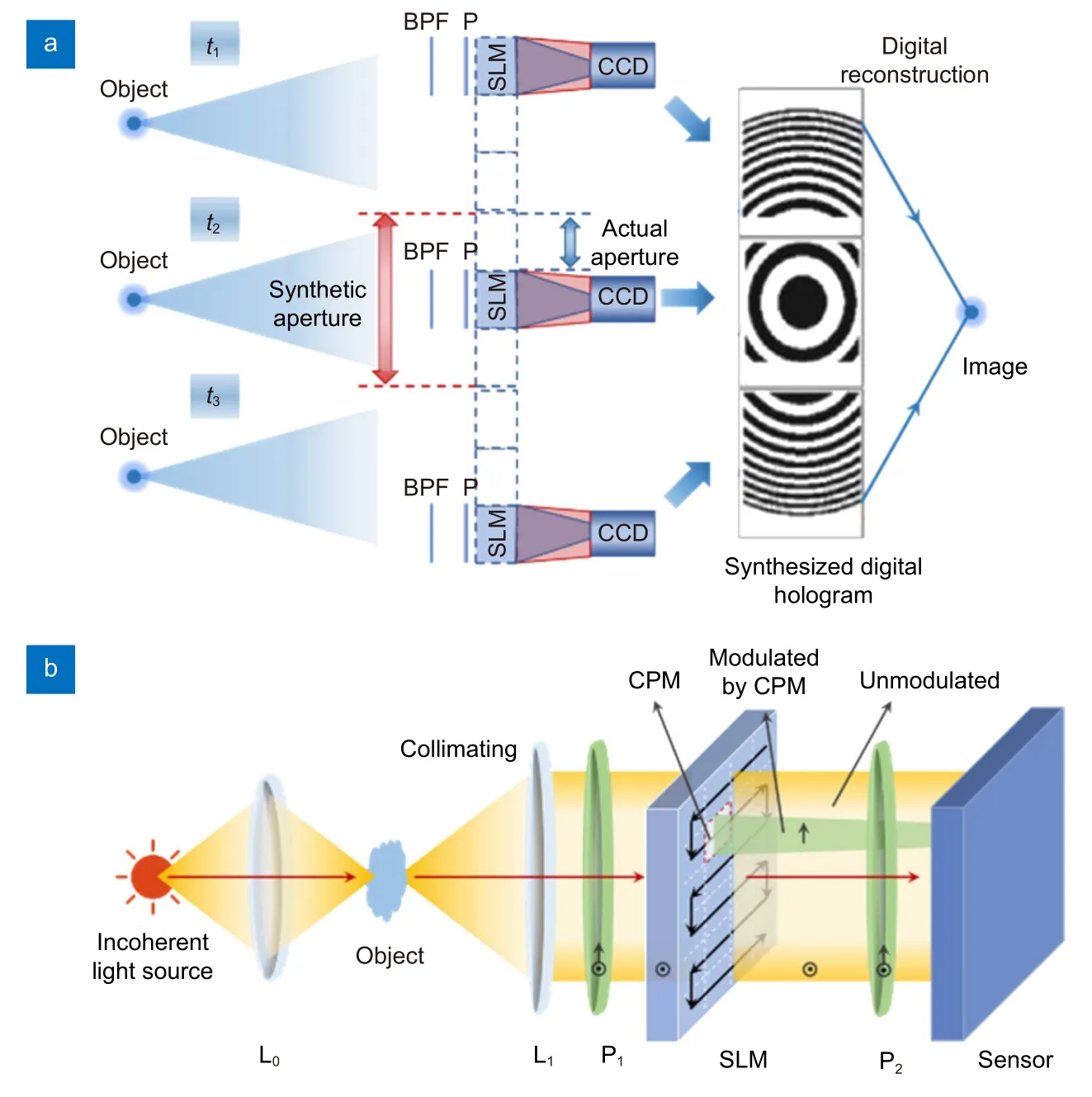
图21 (a) SAFE 技术合成孔径成像示意图;(b) OCTISAI 技术合成孔径成像光路[88]Fig.21 (a) Schematic diagram of synthetic aperture imaging by SAFE technique;(b) Optical path of synthetic aperture imaging by OCTISAI technique[88]
2021 年,Rosen 与Bulbul 又提出了单通道非相干合成孔径成像技术(one-channel-at-a-time incoherent synthetic aperture imager,OCTISAI)[89],如图21(b)所示,不同于SAFE 技术在SLM 上加载菲涅尔干涉图案,OCTISAI 则采用随机相位图案作为调制,以解决SAFE 结构优化的问题[88]。但由于相关技术的报道中,子孔径均由系统光学器件(SLM)的全孔径分割而成,其合成的最大孔径尺寸仍受限于所采用光学器件的孔径,如何突破光学器件物理孔径限制,实现更高的光学分辨率尚不明确。
另一种类似的方法基于自相关探测实现,系统采用分波前自相关从不同角度对目标进行独立的记录,然后通过傅里叶叠层重建算法,在恢复各孔径下光场相位的同时,将低分辨图像合成重建得到目标的高分辨图像[90]。图22(a,b)展示了这种方法的孔径合成示意图以及原理验证光路。以飞机模型作为目标进行合成孔径成像实验,超分辨前后重建结果如图22(c,d)所示,大量目标细节得到恢复。这类技术极大地促进了新兴非相干合成孔径的发展,区别于传统非相干合成孔径多路同时干涉再记录的成像过程,自相关探测可以基于单孔径系统对不同子孔径单独拍摄,并在后期重建中实现孔径合成。这类技术以串行子孔径记录方式取代传统多孔径成像系统中的多路并行干涉,以时间分辨率换取空间分辨率,规避了传统多孔径成像系统体积庞大、结构复杂、调试困难等弊端,有望实现被动合成孔径系统的轻量化。

图22 (a) 基于自相关探测的孔径合成原理示意图;(b) 基于自相关探测的合成孔径成像光路;(c,d) 孔径合成前后的重建结果及其细节对比Fig.22 (a) Schematic diagram of the principle of aperture synthesis based on autocorrelation detection;(b) Synthetic aperture imaging optical path based on autocorrelation detection;(c,d) Reconstruction results before and after aperture synthesis and detail comparison
尽管自相关探测能够以分波前自相关的方式从不同角度对目标进行独立记录,并通过叠层重建实现相位恢复与孔径合成,最终提升成像分辨率,但相关原理与方法依旧处于初步探索阶段,在实际应用中面临着诸多问题。其中,最关键的一点在于自相关探测对入射光场时间相干性的要求,波前相关得到的图像对比度取决于光场的时间相干性以及光路光程差,通常采用窄带滤波以提高图像的对比度,但这也使得成像过程能量利用率低,带来图像信噪比差等问题,对于频谱中信号能量较弱的高频部分这个问题尤为突出。将相关技术推广至宽带光源或是针对这种极低信噪比图像的信息提取与处理的研究也有待开展。其次,这一技术的时间分辨能力与体积尺寸也存在取舍,是采用单孔径串行获取各子孔径的图像以时间分辨率换取空间分辨率,还是利用子孔径阵列并行获取图像,也需要针对具体应用场景进行考量。总之,尽管目前亟需将非相干合成孔径技术由理论变为现实,并快速应用于战场、遥感以及天文观测等存在分辨率提升瓶颈的领域中,但其仍面临着诸多挑战,需要在进一步的研究中加以解决。
6 总结与展望
当下快速发展的计算成像技术为远场合成孔径探测提供了新思想、新方法、新理论,结合计算成像思想可显著提升传统合成孔径技术的成像效率,降低合成孔径技术中对“干涉获取相位”或“固有共相探测模式”的过度依赖,突破传统合成孔径技术所能够达到的功能/性能疆界,并在远场合成孔径领域提供了多方面拓展延伸的可能性。本综述系统总结了远场合成孔径技术随着计算成像思想的兴起发展到崭新阶段的过程,即从微波发展为可见光,从干涉发展为非干涉,从主动相干探测发展为被动非相干探测。进一步详细阐述利用光强信号直接反演实现的非干涉合成孔径技术,并介绍了其在高精度、高时间分辨率、高信噪比方面的拓展;为了进一步实现无源合成孔径探测,对非相干光合成孔径技术进行了详细叙述,有望借此实现轻量化的新兴非相干合成孔径探测系统,为无源远场探测开辟一条全新的思路。
本文作为综述性论文,既给出了微波雷达、射电望远镜等与光学合成孔径探测有一定关联的领域,又描述了光学合成孔径中干涉以及非干涉合成孔径的发展。然而,无论是基于相干光调控照明的远场合成孔径技术还是基于非相干光的被动远场合成孔径技术,计算成像在新兴合成孔径技术中的可行性都能够在更为宽广的应用场景中验证。作为新兴成像技术中的前沿研究领域,计算成像赋能的远场合成孔径的发展过程是不断发现问题与解决问题的过程。例如针对相干光调制的干涉式合成孔径远场成像存在的相位获取复杂的问题,提出了基于傅里叶叠层的相位反演合成孔径成像;针对非相干合成孔径远场成像存在的共相探测难以实现的问题,提出了分段式平面干涉成像技术以及基于非相干全息的合成孔径技术。随着合成孔径远场成像的应用更加广阔,目前以计算成像为体系的新兴合成孔径技术也正面临诸如频谱中高频信息获取困难、成像距离与信噪比之间的矛盾关系等问题,这无疑是合成孔径技术在远场成像发展中会遇到的问题。作为相关研究人员,不妨放眼计算成像赋能合成孔径技术的未来,在当前计算成像体系中,还有一系列新概念和新体制成像技术正待完善,处于探索阶段的单光子探测技术以及傅里叶变换光谱测量技术或许能为合成孔径远场成像在未来提供契合的解决方案。可以预计,随着信息化、智能化的加速发展,基于计算光学调控的合成孔径成像技术将会突破成像技术的信息边界,为光学遥感、军事侦察以及近地卫星探测等领域带来更多可能。
