矿用长距离带式输送机巡检系统设计
2024-01-12彭佳斌
彭佳斌
(晋能控股煤业集团挖金湾煤业有限公司,山西大同 037000)
近年来,随着智能化进程的加快,煤矿运输中使用的长距离带式输送机也朝着智能化发展。传统的带式输送机在高负荷条件下运行,易发生断裂、跑偏等突发性事故。2020年9月重庆松藻煤矿在使用带式输送机过程中,托辊存在故障时胶带局部出现了过热问题,最终形成火灾安全问题。另外,带式输送机的工作环境存在有毒气体浓度超标问题,对井下工作人员的生命安全构成较大的威胁。为了能够有效地提升工作人员的安全问题,为此需要安排专人对带式输送机进行检查。可是在具体的应用过程中,带式输送机输送带长达几十公里,仅仅借助人工的话,工作人员不仅劳动强度大,而且往往存在漏检问题,最终酿成严重的安全事故问题。因此需要对原带式输送系统进行分析,并可以将其升级。为了能够有效地识别带式输送机故障问题,在带式输送机上面设置巡检单元,进而可以有效地识别带式输送机工作情况的参数。同时,减少了人力巡检过程中,存在的各种漏检、误检、不能及时发现故障等风险[1]。这种智能化的带式输送机不仅可以有效地提高井下工作效率,而且能够有效地提高安全问题。
1 有关长距离带式输送机巡检系统设计要点
在煤矿井下使用带式输送机时,必须对井下工况环境进行充分地调研,诸如第一:潮湿问题;第二,粉尘问题;第三,电磁辐射问题等,这些问题往往会对运输环境产生较大的影响。从而可以保障长距离带式输送机巡检系统能够适应复杂的工况环境,还需要满足处在长时间恶劣环境下仍能保证结构不会发生损坏,与此同时保证电路硬件单元能够正常工作。该系统必须满足高性能、高可靠性,因此该系统设计要求如下所示:
(1)该智能巡检系统设计完全能够替代井下工作人员的工作;
(2)该智能巡检系统设计的工作过程必须与人工巡检相适应;
(3)该系统工作的指标必须满足井下巡检的需要;
(4)该智能巡检系统必须适应井下复杂的工况情况;
(5)智能巡检系统的组装简便且在应用过程中能自主巡检操作。同时,能对异常情况进行数据采集;
(6)参考相关资料,制定井下主要气体的安全检测指标,见表1。
2 总体方案设计
2.1 轨道支撑系统设计
受煤矿井下空间受限的影响,传统履带式行走和轮式行走的智能巡检系统无法完成井下工作任务。为了使智能巡检系统更适应井下的操作环境,顺利完成井下工作内容,从而研发出轨道移动巡检系统,在其上设置智能巡警系统。按此种方法设计的智能巡检系统相较于传统的人工巡检,能够根据井下环境,合理调整巡检措施,同时能够更加全面,细致地开展井下工作。轨道式行走智能巡检系统的布置,如图1所示。
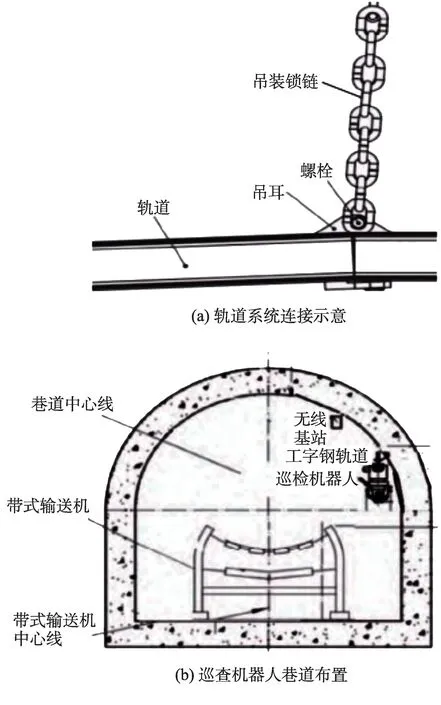
图1 轨道系统连接与巡检机器人巷道布置
在轨道系统连接与巡检机器人巷道布置中,轨道系统由高强度铝合金导轨拼接而成。组装过程中,每隔3m左右会安装1个支撑轨道的固定支架。轨道之间通过吊装锁链组装,为使组装更加牢靠,轨道之间用螺栓加固。另外,要支撑机器人的轨道平台的承载重量达到60kg 以上。由于轨道重量较轻,因此通常可以依据工况设置合理的轨道。保证智能巡检系统在各种环境下都能正常运行且具有较高巡检效率。
2.2 智能巡检系统本体结构
该系统主要包括两个子系统:第一,支撑系统;第二,智能巡检系统,其中,设计的过程中在智能巡检系统上设置如下部件:第一,传感器装置,能够对环境进行监测;第二,通信装置,能够接受信号;第三,电池,可以为系统提供电能。在机器人工作过程中,精确控制机器人的运动路径,对井下环境进行全面检测获得更精确的巡检信息。巡检机器人本体结构如图2所示。
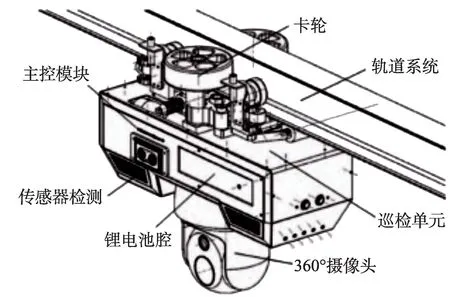
图2 巡检机器人本体结构
智能巡检系统设置了多种传感器,主要涉及两大类:第一,温度传感器;第二,气体监测传感器。该类型的传感器主要能够对井下温度以及有毒气体进行监测,与此同时设置有红外线成像仪能够实现对设备的温度进行监测,从而识别设备是否处于故障状态以及可以确定设备的位置。智能巡检系统能够精确地检测到设备的运行状态,依赖于可见光的最大分辨率达到1900×1000的热成像网络摄像机。在该高分辨率下,能够清晰地观测到设备的移动情况。智能巡检机器人设置了如下检测设备可以代替员工执行带式输送机巡检工作,诸如第一,摄像机;第二,温度监测设备;第三,声音监测设备。通常需要完成如下几部分工作:第一,检测输送机运行的参数;第二,对托辊运行状态进行检测;第三,对环境参数进行检测;第四,对温度与烟雾进行检测等。后续通过图像算法的处理进行人机整合后,清晰显示在摄像机镜头中。机器人巡检系统组成如图3所示。
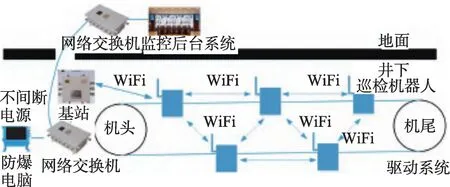
图3 机器人巡检系统组成
智能巡检系统涉及如下几个单元:第一,外形单元;第二,主控单元;第三,通信单元;第四,传感器单元;第五,无线充电单元等。其中传感器单元包含如下几个部分;第一,激光照射器;第二,一体化云台;第三,可见光摄像机;第四,红外热成像仪等。后台监控单元在该系统中处于核心位置。与此同时可以借助服务器、交换机以及无线AP接线实现信息的交互。控制中心单元包括如下几个方面的子系统:第一,数据分析;第二,图像处理;第三,报警;第四,调度优化系统;第五,语音识别系统等。操作过程中,工作人员可通过远程无线遥控的方式对巡检机器人进行操控。也可通过远程无线遥控控制中心的监控系统和巡检机器人的交互通信。在有线局域网的范围内,监控中心的计算机网络可接受来自井下机器人的数据通信。数据通信的接收前提要在煤矿井下布置AP 节点。在AP 节点存在的情况下,能将无线网络的覆盖融入有线局域网。同时,在有AP 无线网络覆盖的情况下,机器人自身安装的无线路由器,能够将定位参数与工况情况传输给主机[2]。
3 智能巡检系统通信单元以及软件系统设计
3.1 网络通信系统设计
网路通信系统能够将井下运输机工作下的图片以及声音传输给主控单元。此环节是机器人代替人工较重要的部分,从而可以大大提高巡检效率以及精确度。在巡检系统中设置有信号发生器,其通过光纤通信设备将现场信息传输给主控设备。巡检系统与远程控制终端的信息交互借助以太网进行传输。图4表示智能巡检系统单元与无线通信系统进行信号传输的原理,表2表示无线基站的参数信息。

图4 无线基站通信系统原理
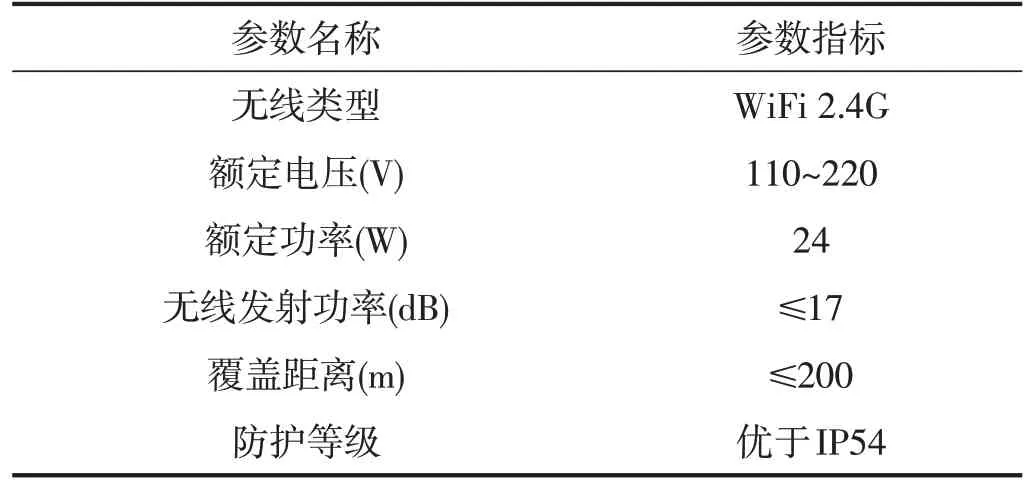
表2 无线基站参数信息
本次设计使用的无线基站的类型为WiFi 2.4G 通信,额定电压范围为110~220V,额定功率设定为24W。覆盖中心的距离为200m,相应的防护等级设定为IP54。无线基站之间进行信息交互时选用光纤,从而可以大大提高基站传输信息的稳定性。
3.2 软件系统设计
为了优化巡检机器人的智能化,因此该系统还需要设置良好的软件系统,图5表示相应的软件控制系统流程示意图。
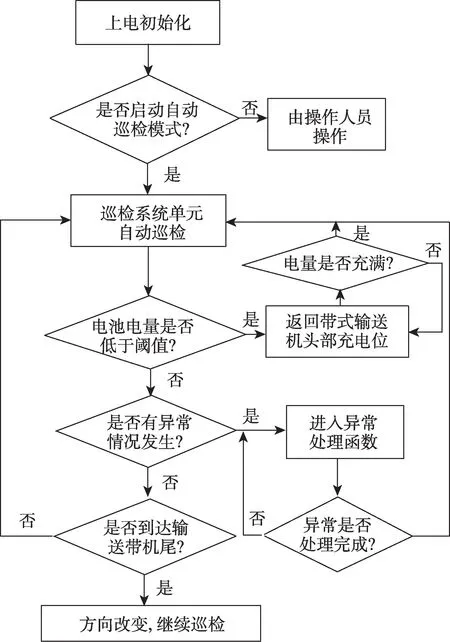
图5 软件控制系统流程
智能巡检系统在出现异常情况时,最先做出判断并给出异常信号的是异常处理函数流程。假如系统识别到障碍物时,将该参数以异常参数的形式反馈给系统,这时系统通过传输将异常位置锁定,让系统对故障进行诊断。
4 上位机监控系统设计和应用现场
该系统可以有效地替代人工巡检,主要是由于设置的传感器与视频成像装置。这些传感器首先收集井下的各环境参数,主要涉及如下几个参数:第一,设备表面温度参数;第二,有害气体的浓度参数等。接着,将采集到的信息传输到监控室,与此同时在显示屏上显示报警。基于上述原理,从而设计出满足井下复杂工况的智能巡检机器人监控系统。借助利用Microsoft Visual 软件监控系统后台程序并进行故障识别分析算法的编写。利用labview 2018 设计人机操作界面。通常可以借助上位机实现对井下带式输送机的工作环境进行显示。图6表示相应的智能巡检系统在井下带式输送机异物检测识别现场。

图6 巡检机器人异物识别应用现场
该智能巡检系统的实际应用显示出高效的巡检效率,仅1 台设备就可以代替约20 人的工作任务量。最主要的是该智能巡检系统可以实现24h不间断巡检,在准确高效识别故障的同时,降低了人工成本。
5 结语
为解决井下带式输送机,人工巡检强度大、效率低、易出现漏检的问题。所设计的智能巡检系统有效解决了上述问题,并减少煤矿事故的发生。该长距离带式输送机,包括轨道式行走部分和智能巡检本体模块。轨道式行走部分可以适应井下的狭窄复杂环境,即使在狭窄巷道内仍能自由移动。智能巡检本体模块可以进行井下信号的采集,并通过无线通信系统将故障信号反馈到地面监控站。同时该智能巡检系统可代替传统约20人工巡检才能完成的工作量并能实现全天不停歇巡检而不发生故障。煤矿事故的发生大多由于异常温度不能及时发现而产生。而红外热成像探查设备能够对异常温度进行敏锐捕获并及时报警,从而达到减少巡检盲区的效果,有效避免煤矿事故发生。
