一种无人直升机避障系统设计
2024-01-12程燕胜杨鹤猛杨雪乔晓明
程燕胜, 杨鹤猛, 杨雪, 乔晓明
(天津航天中为数据系统科技有限公司, 天津 300301)
0 引言
随着我国架空输电线路里程不断增加,巡检需求和人力缺员的矛盾日益突出,依靠人力进行线路精细化巡检运维,在工作效率和经济效益上已无法满足需要。随着无人机技术和人工智能识别技术的发展,无人机自动巡视已得到广泛应用,全自动无人机巡视已成为输电线路无人机巡检的发展重点[1],通过无人机搭载各类巡检任务载荷对线路进行巡检,并自动完成巡检数据处理,大大提高了巡检效率和质量。小型多旋翼无人机航时和载荷能力有限,无法满足远距离线路巡检等场景要求,无人直升机由于载重量大、航时长的特点,适用于输电线路远距离精细化巡视作业,也得到了应用。
无人直升机进行线路精细化巡视时,需识别出部件的隐患缺陷,无人直升机与线路之间的距离较近,线路本体设施和周边树木等都可能成为障碍物,严重影响作业安全,对避障功能提出了迫切要求。当前研究针对多旋翼无人机避障[2-3],技术相对成熟,市场上部分多旋翼无人机已具备自动避障能力,但在无人直升机上尚未普及,一定程度上制约了无人直升机巡检的应用。
本文对障碍检测传感器进行综合对比分析,利用多传感器协同检测的方式,设计一种适用于架空输电线路直升机巡检的避障系统,可有效提高机巡作业时的障碍避让能力。
1 总体设计
无人直升机避障系统主要由障碍检测传感器(毫米波雷达及双目摄像机)、避障控制器、数传电台和监控地面站组成,如图1所示。
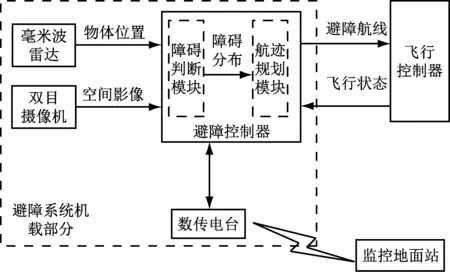
图1 无人直升机避障系统组成
避障系统各组成部分如下。
(1) 障碍检测传感器
包括毫米波雷达和双目摄像机,对不同方向障碍物进行实时感知,并将检测信息发送至避障控制器。
(2) 避障控制器
根据检测到的障碍物分布信息,结合无人直升机飞行状态,计算出避障航迹,并发送至飞行控制器。
(3) 数传电台
完成避障控制器和监控地面站之间的信息交互。
(4) 监控地面站
避障系统参数配置和飞行规划航迹上传,实时监视系统工作状态。
2 传感器选型
实现自主动态避障的首要任务是检测到障碍物,然后由控制系统做出实时避障操作[4]。可选的传感器类型也较多[5-7]。对应用广泛的典型传感器进行对比分析,如表1所示。
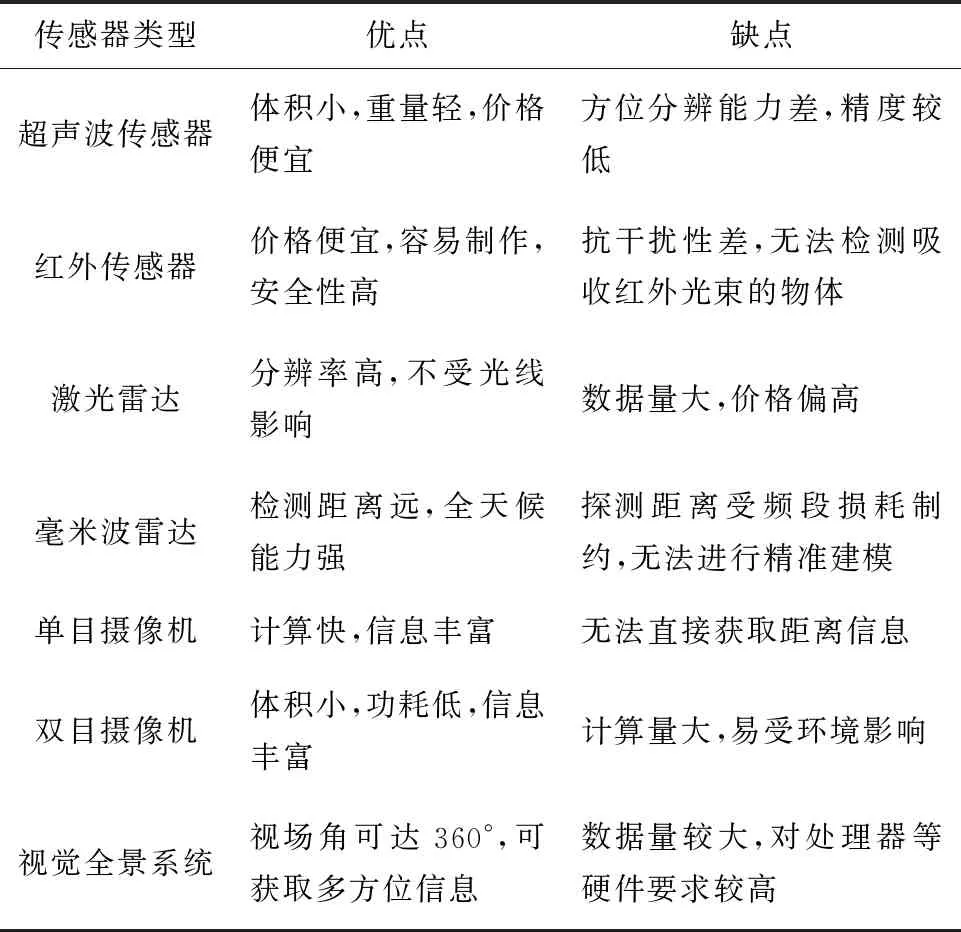
表1 典型障碍检测传感器对比分析
利用雷达和视觉传感器进行目标检测在车辆自动驾驶领域已得到应用[8]。采用毫米波雷达与双目摄像机相结合的方式进行障碍物检测,既可对导线等金属物进行有效检测,同时可发挥双目视觉检测信息丰富的特点。
3 障碍物判断
通过构建虚拟的避障空间,可为航线规划提供依据[9-10]。设计圆柱状的飞行通道,以飞行器中心为原点,沿航向进行拉伸形成飞行通道,通道半径视具体机型可以配置,长度取毫米波雷达最大检测距离。根据检测到的物体位置信息,结合与下一航点的位置关系,判断物体是否位于飞行通道内。可分为两种情况。
(1) 检测物体在下一航点前
如图2所示,R为飞行通道半径,AE为航线方向,下一航点G位于飞行通道外,A为无人直升机,B为检测物体,L为目标距离,α、β分别为检测物体方位角、俯仰角。
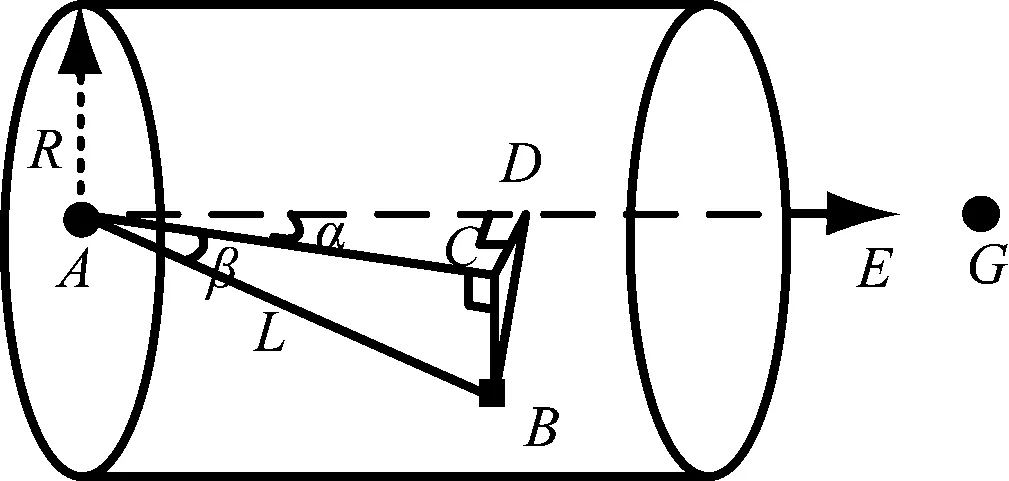
图2 检测物体在下一航点前障碍物判断
根据三角形勾股定理,利用L、α、β可计算出CD。若CD≤R,则检测到的物体位于避障空间内,视为障碍物。
(2) 检测物体在下一航点后
如图3所示,障碍检测传感器检测到的物体位于下一航点后。假设刚经过第N个航点,则G1为N+1航点,G2为N+2航点,BD垂直于G1G2。
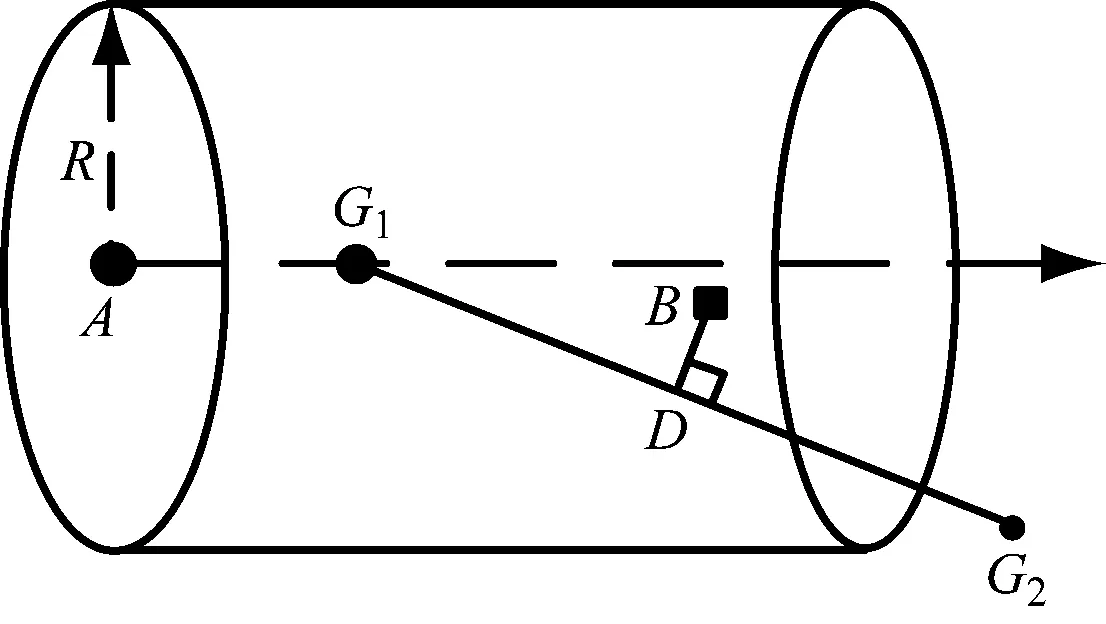
图3 检测物体在下一航点后障碍物判断
根据检测物体方位及相对距离可计算出B点的位置,根据B、G1、G23点位置即可计算出BD长度。在不考虑无人机转弯半径的情况下,若BD≤R,则认为检测到的物体为障碍物。
4 系统应用模式
在无人直升机飞行控制器支持实时更改航线的情况下,避障系统检测到障碍物时,自动规划避障航线,将避障航线实时注入飞行控制器中,实现无人机自主避障。
避障系统的工作流程如图4所示。
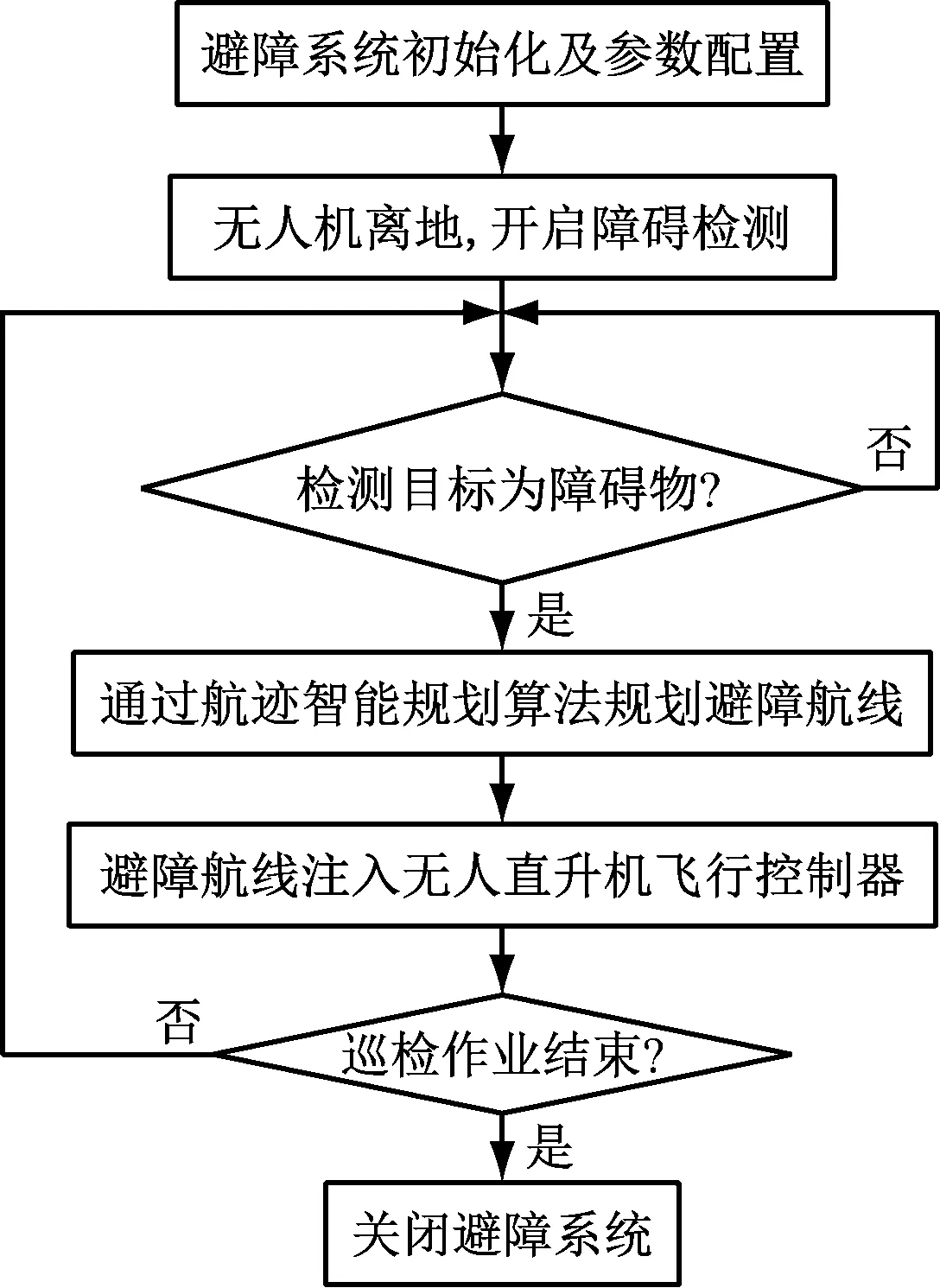
图4 避障系统工作流程
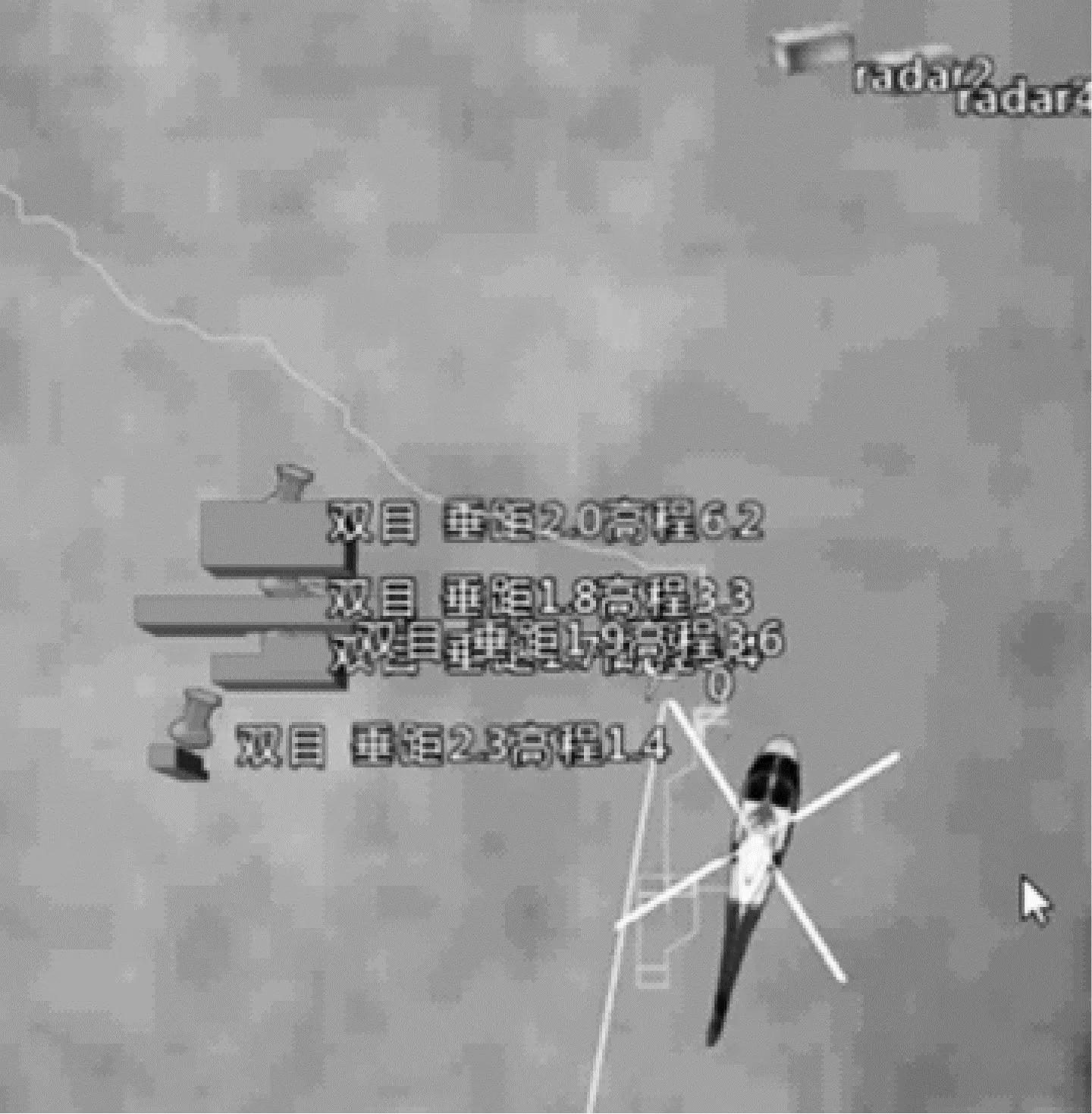
图5 监控地面站显示障碍物分布
避障主要分为以下几个阶段。
(1) 系统参数配置
避障系统上电后,通过监控地面站采用手动或读取配置文件的方式进行参数配置,配置的参数主要包括飞行器类型、避障空间长度、任务航线等。
(2) 开启障碍检测
当飞行距地高度超过安全半径时,避障系统处于工作状态,避免起降阶段将地面视为障碍物的误警情况。
(3) 障碍物判断
对检测到的物体进行安全距离判断,确定影响飞行安全的障碍物。
(4) 避障航线规划
根据检测到的障碍物分布情况,考虑制约因素,自动运行避障航线智能规划算法,生成与障碍物保持安全距离且尽可能平滑的避障航线[11]。
(5) 避障航线注入
将规划避障航线注入无人直升机飞行控制器。
(6) 关闭避障系统
巡检作业完成,离地相对高度小于安全半径,系统自动关闭。
5 系统测试
将避障系统安装在无人机上进行测试,毫米波雷达可实现远距离障碍物的检测,输出障碍物的距离、方位等信息,双目视觉传感器可有效探测宽视场范围目标。通过测试,设计的避障系统可有效实现障碍物检测及避让。
6 总结
本文设计了一种适用于输电线路无人直升机巡检的避障系统。针对输电线路巡检作业典型障碍物探测需求,在对不同的障碍检测传感器进行优缺点对比的基础上,完成传感器选型及避障流程设计,采用多传感器组合检测的方式,充分发挥毫米波雷达探测距离远及双目摄像机检测信息丰富的特点,通过调整毫米波雷达带宽及双目摄像机焦距实现不同距离及分辨率的目标检测,对不同安全距离要求的无人直升机具有良好的适配性,可为提高无人机直升机架空输电线路巡检安全性提供参考。
