一种拖拉机核心执行机构的可靠性分析
2024-01-11卢利平
卢利平
(河南职业技术学院,郑州 450046)
0 引言
机构系统运行过程中存在较大的不确定性因素,使得机构运动输出时的精度、性能以及动作均存在随机性,与期望值之间形成偏差[1-3]。在设计阶段,要求对偏差值进行充分考虑,降低机构运动过程中的不确定性,提高机构运行精度和动作可靠性[4-5]。拖拉机转向机构是一种典型的连杆机构,转向梯形机构中梯形臂转角与理论转角之间存在误差,导致拖拉机转向机构的运动可靠性分析成为设计阶段需考虑的关键问题[6]。为此,综合考虑拖拉机转向机构的结构误差和随机误差,利用概率理论分析的方式对拖拉机转向机构运动精度和可靠性进行分析。
1 拖拉机转向机构运动分析
拖拉机转向过程中转向轮保持纯滚动状态,以避免车轮侧滑引起轮胎磨损,造成不安全隐患[7]。拖拉机转向过程中所有车轮始终围绕同一个瞬时圆心进行转动[8-9]。图1为拖拉机转向原理图。其中,O为全部车轮的轴线交点,称为瞬时转向圆心。
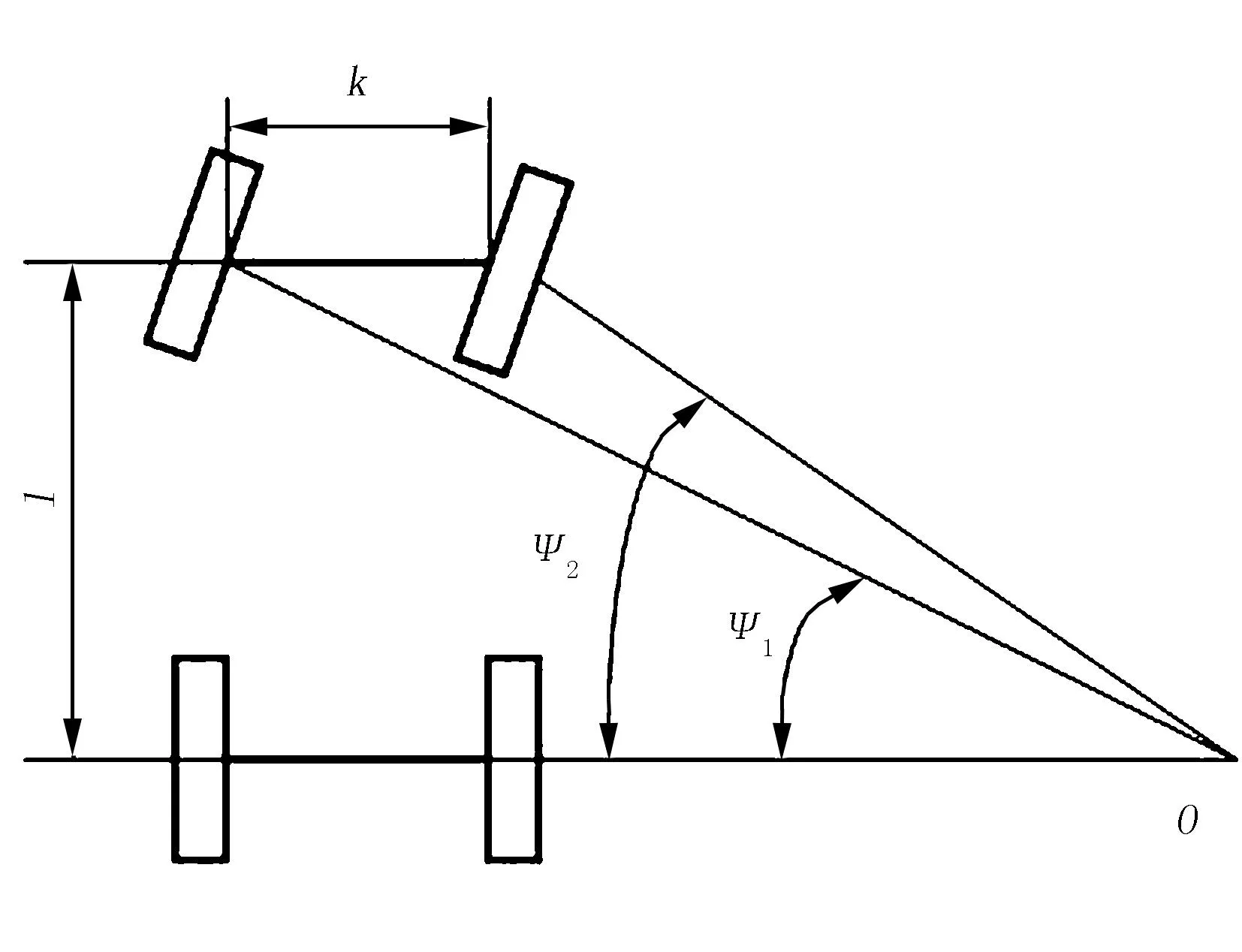
图1 拖拉机转向原理图Fig.1 Tractor steering schematic diagram
根据图中几何关系,可以得出拖拉机转向轮的转角关系为
其中,l为拖拉机轴距;k为转向轮距;Ψ1为左轮转向角;Ψ2为右轮转向角。
拖拉机转向过程是复杂的空间机构运动过程,分析时忽略轮胎侧换和弹性变形,将转向机构简化为平面机构[10-12]。图2为转向机构四杆运动简图,图2(a)为转向机构参考位置,图2(b)为转向过程简图。其中,a1为主销间距;a3为转向横拉杆长度,a2为左侧梯形臂长度;a4为右侧梯形臂长度,且两个梯形臂长度满足a2=a4;β为梯形臂与自身所带标尺之间的夹角。
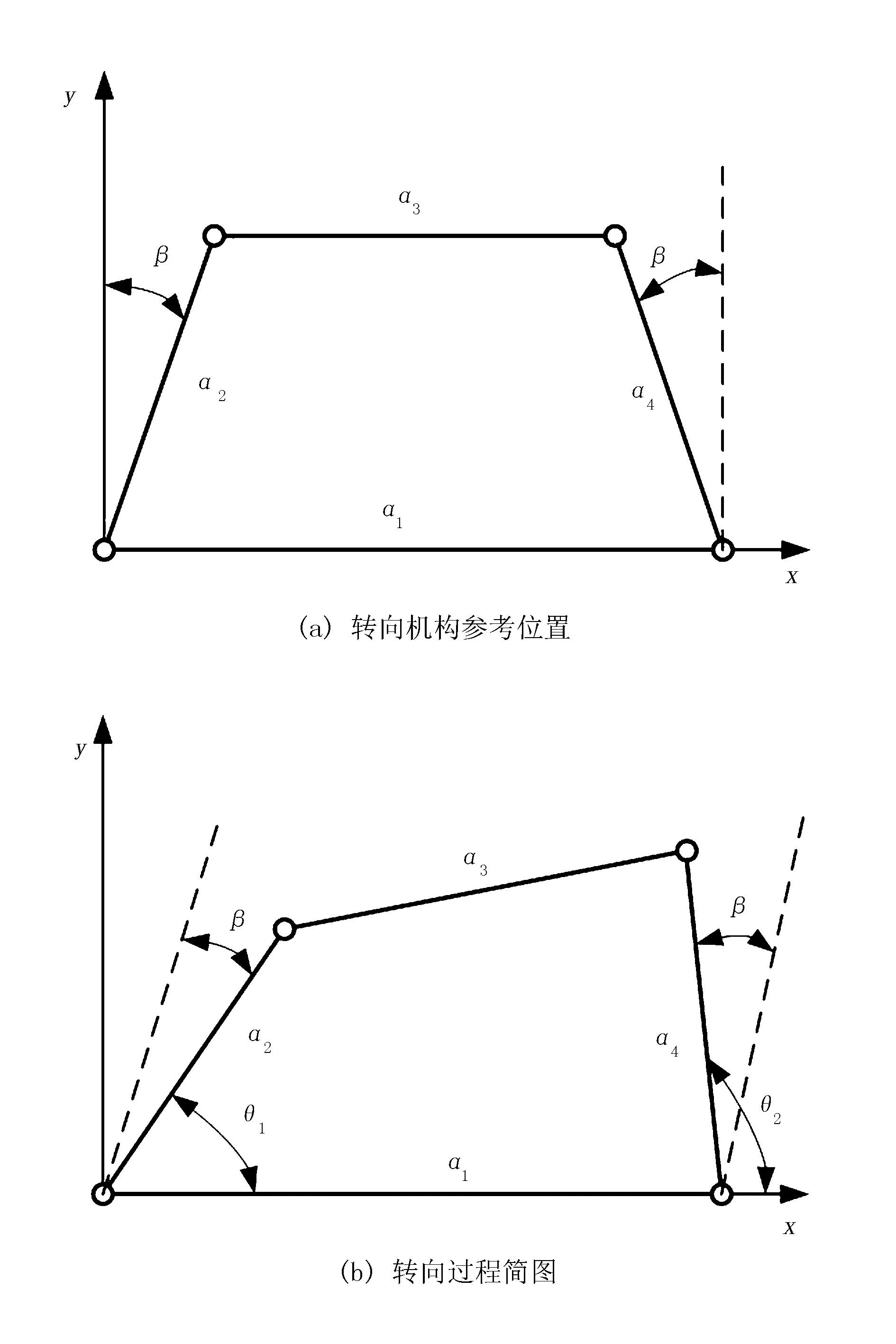
图2 转向机构四杆运动简图Fig.2 Four bar motion diagram of steering mechanism
平面转向四杆机构的输入角与拖拉机左轮转向角之间的关系可表示为
平面转向四杆机构的输出角与拖拉机左轮转向角之间的关系可表示为
因此,拖拉机转向角可表示为转向机构结构参数的函数为
Ψ(X)=Ψ(a1,a2,a3,a4)
拖拉机转向四杆平面机构的运动误差传递函数可表示为
g(X,Ψ)=Ψ(X,θ1)-Ψ(θ1)
利用Freudenstein方程对平面转向四杆机构进行分析,其输入输出方程可表示为
2a2a4cos(θ1-θ2)=0
其中,θ1为平面转向四杆机构的输入角;θ2为平面转向四杆机构的输出角。
由此可以得出

2 转向机构运动误差分析
同一批次生产的零件,其尺寸服从正态分布,则假设拖拉机转向平面四杆机构尺寸参数X为正态分布的随机变量,即
X~N(μX,σX)
其中,μX=(μ1,μ2,μ3,μ4)为随机变量X的均值;σX=(σ1,σ2,σ3,σ4)为随机变量X的标准差。
转向机构结构件尺寸公差与结构件尺寸之间的相对比值较小,因此采用一阶泰勒展开式对误差函数进行展开[13-15],则
μg(Ψ)=b0(Ψ)
综上所述,拖拉机转向四杆机构运动误差均值为
μg(Ψ)=Ψ2(μX,Ψ1)-Ψ1(θ1)
μg(Ψ)=Ψ2(μX,Ψ1)-Ψ1(θ1)
3 拖拉机转向机构可靠性模型
为避免拖拉机转向过程中因为机构运动误差造成侧滑,转向机构的输出转角误差应该小于允许的误差值ε[16],则
|g(X,Ψ)|=|Ψ2(X,Ψ1)-Ψ1(θ1)|≤ε
因此,在任意转向角位置的可靠度R可表示为
R=Pr{|g(X,Ψ)|≤ε}=Pr{-ε≤g(X,Ψ)≤ε}
其中,Pr为概率。
拖拉机转向机构的失效概率可表示为
Pf=Pr{|g(X,Ψ)|≥ε}
=Pr{g(X,Ψ)>ε∪g(X,Ψ)<-ε}
结构件尺寸误差随机变量σX相对于μX很小,则可以得出拖拉机转向机构可靠度为
拖拉机转向机构失效概率为
Pf=1-R
4 拖拉机转向机构可靠性数值分析
选取1组拖拉机转向平面四杆机构对其进行可靠性分析,拖拉机转向平面四杆机构尺寸参数如表1所示。设定转向机构的转向角范围为-40°~40°,则该拖拉机转向平面四杆机构的结构误差曲线如图3所示,拖拉机转向平面四杆机构的失效概率曲线如图4所示。

表1 拖拉机转向平面四杆机构尺寸参数Table 1 Dimensional parameters of tractor steering plane four-bar mechanism
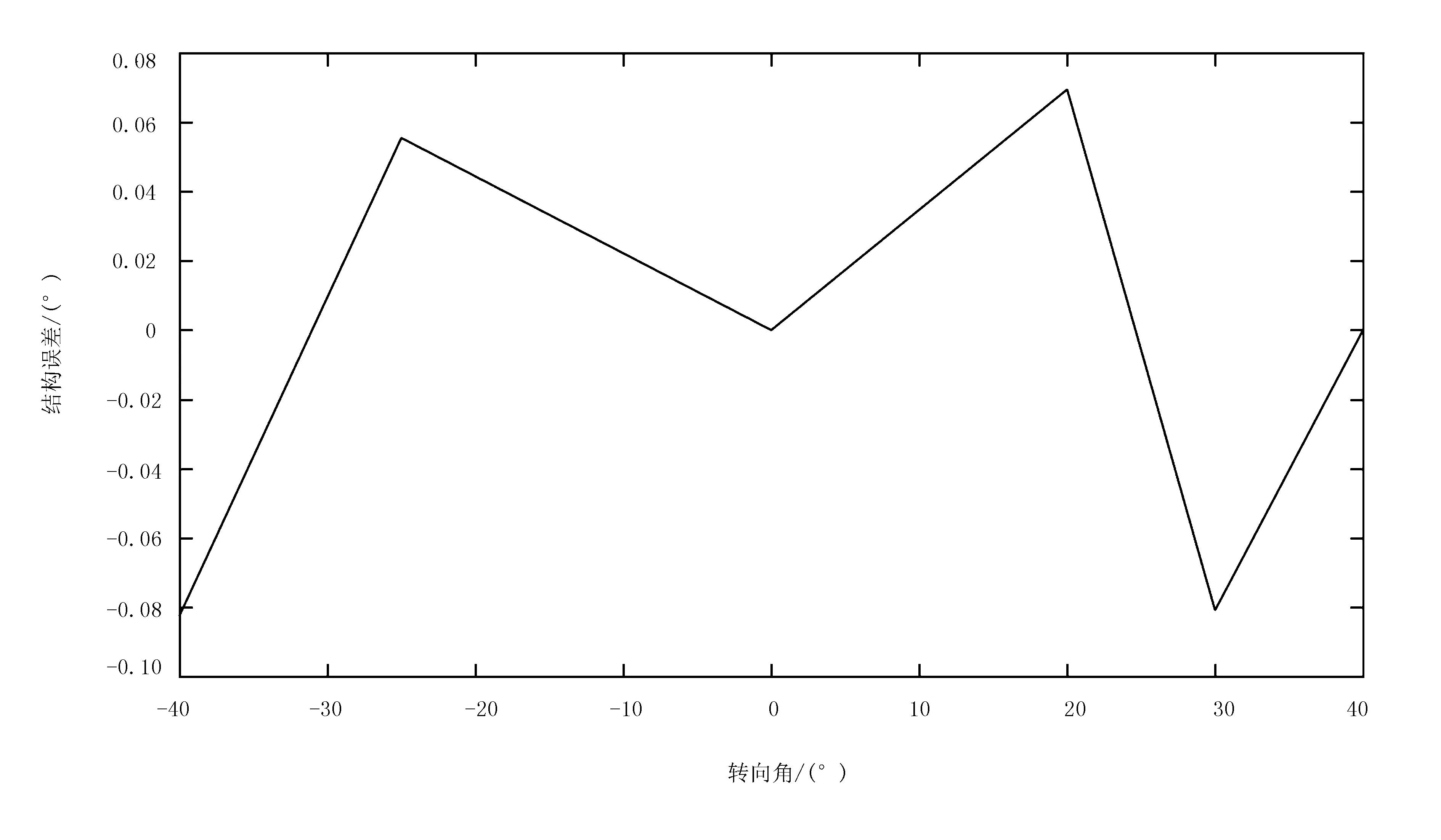
图3 拖拉机转向平面四杆机构的结构误差曲线Fig.3 Structural error curve of tractor steering plane four-bar mechanism
由图4可以看出:拖拉机转向平面四杆机构的结构误差最大时,失效概率并未达到最大值。表2为不同位置处对应结构误差与失效概率数据。
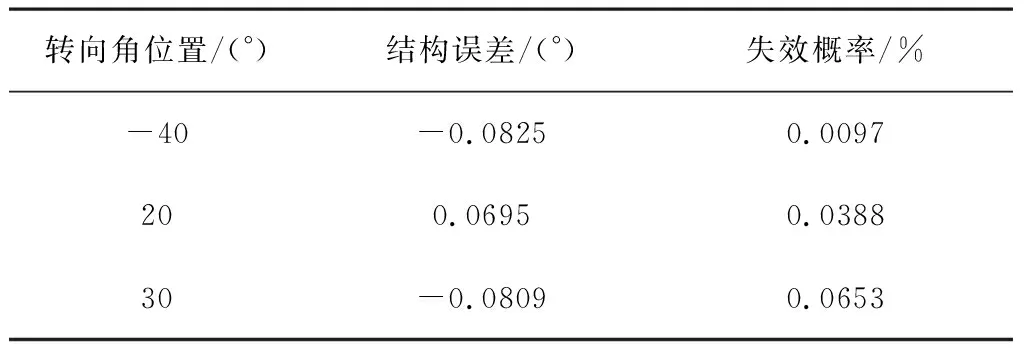
表2 关键位置结构误差与失效概率对比数据Table 2 Comparison data of structural error and failure probability at key positions
5 结论
通过对拖拉机转向四杆机构进行运动分析,建立了转向机构的运动误差概率模型。综合考虑结构误差和不确定误差,对其运动可靠性进行分析,结果表明该方法有较高的可信度。
