基于迭代算法分析的无线通信信号识别研究
2024-01-11张庆松
张庆松
(重庆科创职业学院,重庆 402160)
0 引言
当前,随着智慧农业的不断推动与发展,对农机装备的监控测量精度要求不断提高。用于我国大面积农作物培养管理的植保无人机技术逐步被推广,减少了人工成本和劳动强度,还可以达到现代农业数字化、智能化的发展要求。随着植保无人机的大面积应用,喷洒作业过程中发现整机的通信方面存在迟滞及通信报错频繁、不可预测等多种现象。为此,根据大量的农业实践调研,结合关于通信技术领域的研究成果发现,数学分支的迭代算法是一种对目标函数通过重复递推式计算可实现精确化地逼近或达到目标的过程。本文拟从迭代理论角度入手,对通信系统进行信号的高效处理研究。
1 植保机通信概述
植保无人机可作为自动喷洒农药的首选农作物培育管理装备,具有操作方便、喷洒范围广、多样田地适用的优势。其主要喷施过程是通过远程智能操作,将载箱中的化学农药均匀、有效地喷洒在作物表面,确保农药喷洒的可达度与均匀性。由植保机的通信路径原理构成(见图1)可知:整机的通信系统及路径确定由植保目视距离路径和植保地面实测路径两大部分组成,涉及角度、距离、时延等核心信号参数数据,经通信信道模型的准确识别与迅速处理,完成通信路径的指令输出。
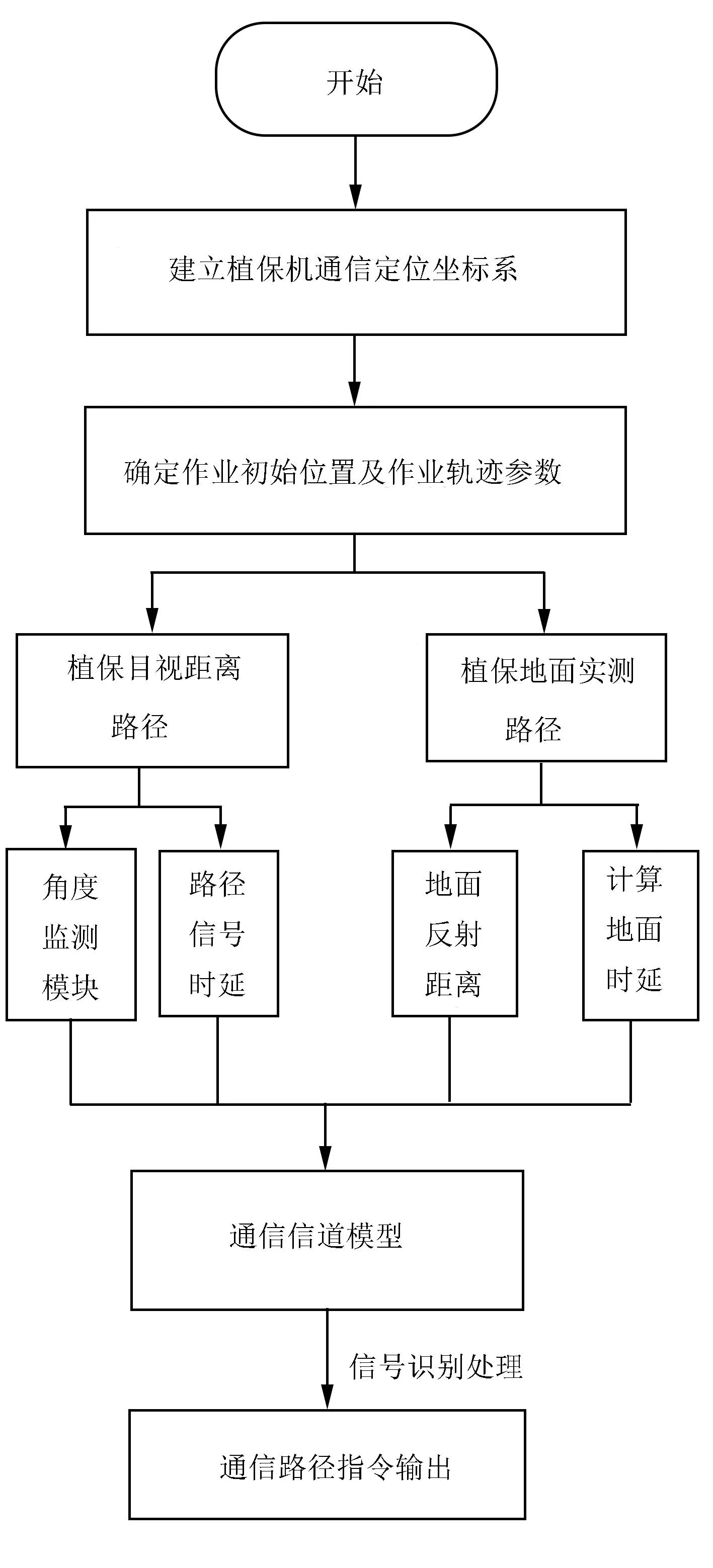
图1 植保机的通信路径原理构成简图Fig.1 Schematic diagram of the communication path principle of the plant protection machine
2 迭代算法分析应用
2.1 模型建立
以植保机通信系统功能及要求为出发点,以迭代算法处理为核心,进行植保机通信模型的信号识别分析,并着重从通信信道的资源识别、功率最优等角度出发,将获取数据与飞行轨迹进行充分的耦合比较,以实现迭代功能的最大能效发挥。首先,从函数范值定义入手,以迭代隐射为次考虑条件,进行迭代规律的收敛意义探讨。为此,搭建能够在最小包容误差范围内得到的最快收敛,选定L的二次空间,建立基于函数Q(x,t)在一定区间内的模与范数之间的关系,即
(1)
式中Q(x,t) -为用于迭代模型的函数;
T-迭代运行时刻;
Rn-实数R的n维阵列;
L2-用于迭代模型的空间;
‖‖2-迭代模型函数的2范数;
‖‖L2-迭代模型函数的模;
t-迭代总时间。
根据此迭代运算关系,进行通信系统的信道频率衰落方程建立。考虑时延、功率及带宽之间的关系,建立信道识别处理模型如下为
(2)
式中Bc-系统信道带宽;
στ-系统信号的时延扩展;
τ-系统信号的瞬时时延;
τave-系统信号的平均时延;
P(τ)-系统瞬时时延功率。
在迭代模型基础上,为了对信道信号做出精准识别,给出植保机的无线通信模型迭代算法规划流程,如图2所示。此过程在于将机体实际作业过程的位置与角度测量数据进行实时输入,与基于迭代算法的通信模型中的路径条件相比较后,做出最优通信路径的识别决策,从而进入后续的迭代算法与控制程序环节。
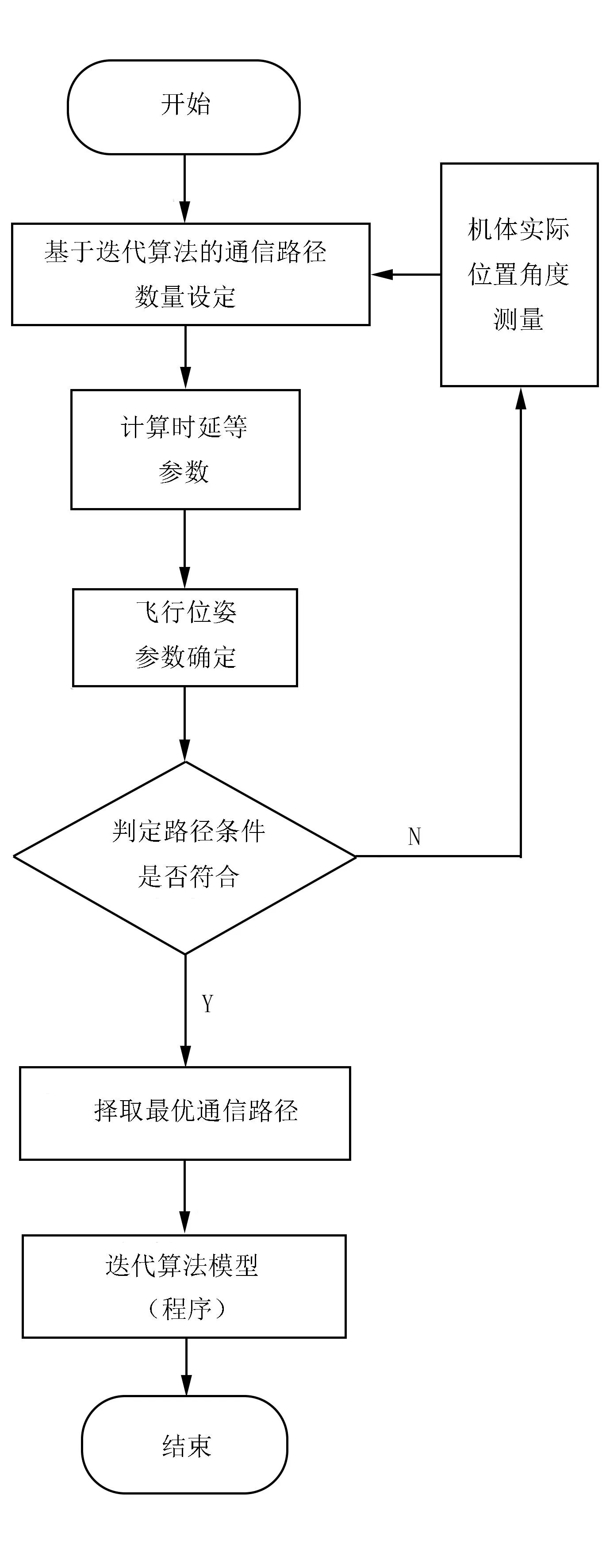
图2 植保机的无线通信模型迭代算法规划流程简图Fig.2 Flow chart of iterative algorithm planning for the wireless communication model of the plant protection machine
2.2 植保机通信特性分析
考虑通信路径的损耗影响,在进行无线通信信号识别过程中应进行一定的方法确认。图3为基于迭代算法的无线通信信道选择方法执行简图,即以植保机通信系统为对象,优化信道参数、信道质量等信号识别的主要因素,将发送端信号功率与待识别信道经原理传输模型与迭代算法模型相连,并由相关度信道关联构成闭环,从而以正确、高效的信道将信号发出。
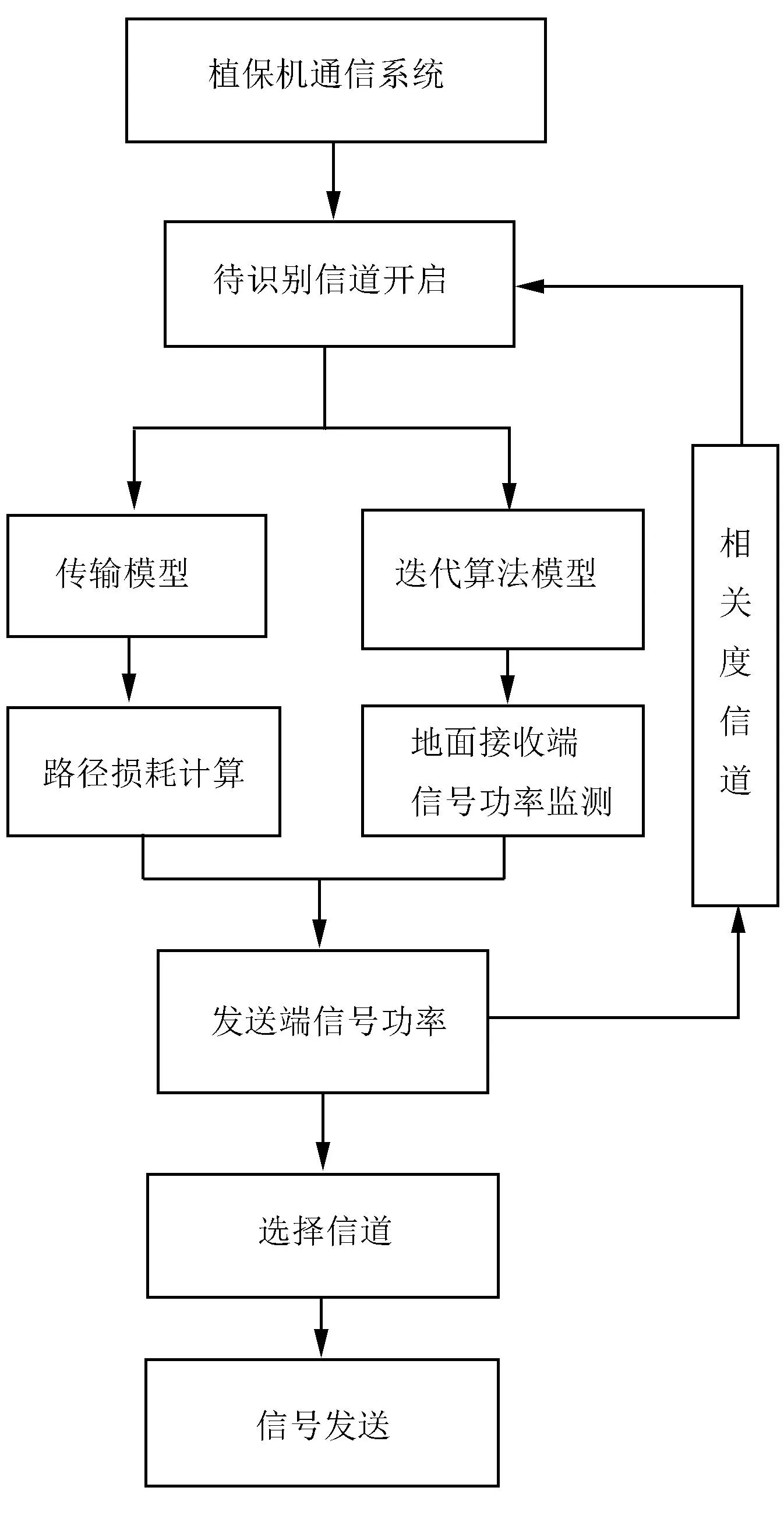
图3 基于迭代算法的无线通信信道选择方法执行简图Fig.3 Execution diagram of wireless communication channel selection method based on the iterative algorithm
为提高无线通信信号识别的准确度,以最大限度降低各信号/因素的干扰因素为目标,给出基于迭代算法的信号识别转换设计简图(见图4);同时,将迭代算法植入调制载波,经并串转换后的信号,进入无线信道识别,其干扰信号已经被有效过滤,再次经串并转换,各基带显示下的频域执行均衡操作后可得到最佳的输出信号。
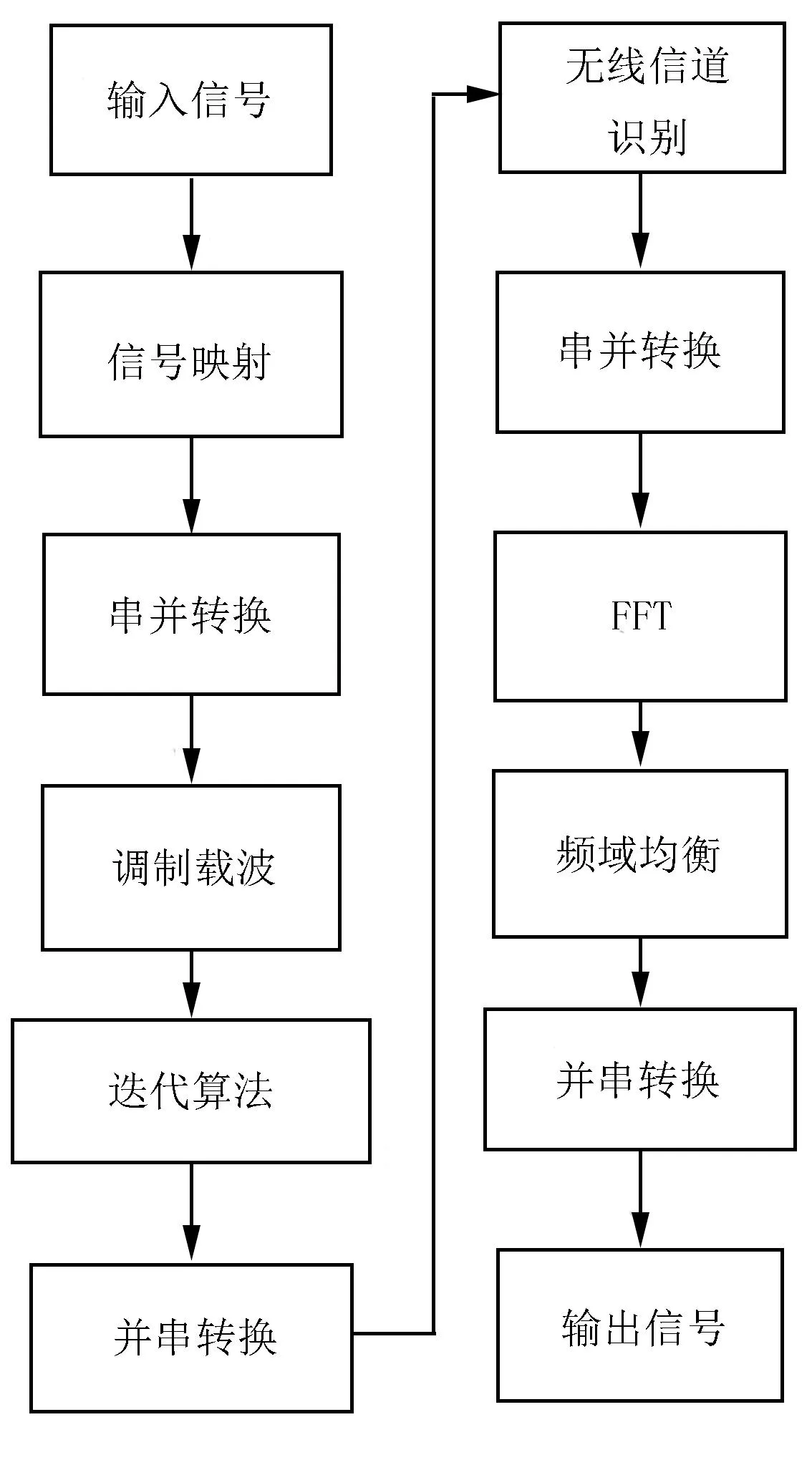
图4 基于迭代算法的信号识别转换设计简图Fig.4 Design diagram of the signal recognition and conversion based on the iterative algorithm
2.3 植保机通信迭代设计
经无线通信信号的关键特性分析后,进行深入的迭代设计过程实现。选定基于迭代算法的植保机通信模块核心参数配置列表(见表1),以KINTex-7芯片作为通信底板,选定恰当的通信路径,针对信号的边界获取,结合飞行高度的渐变特性,远程信号接收端与控制端考虑滤波与迭代的兼容性,在最大传送路径与备选传送路径中交互式进行,这对于信号识别的预处理可起到增强信道功率作用。
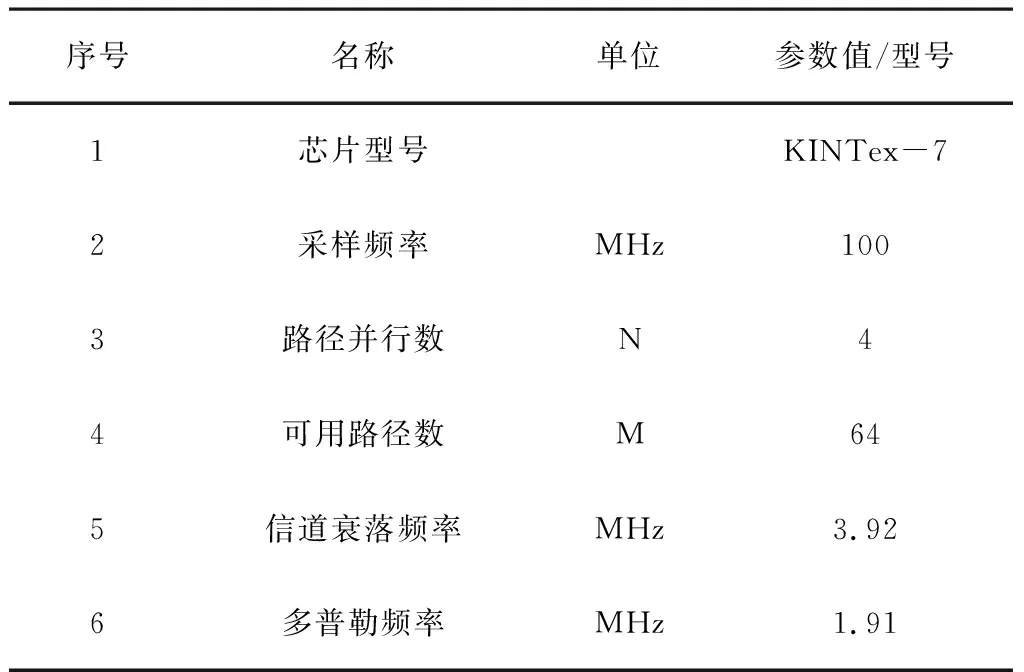
表1 基于迭代算法的植保机通信模块核心参数配置列表Table 1 Configuration list of core parameters of the plant protection machine communication module based on iterative algorithm
以实现各信号识别的深度处理为目标,给出无线通信迭代的硬件布置设计,如图5所示。此布置以内部信道输入输出作为体状考虑,输入处理的迭代计算信号与CPU处理的信号参数数据在信道参数模块下不断迭代,计算角度参数与功率参数,涵盖两次迭代计算识别,确保各信号处理的有效性、准确性,进而指导整机的信号运行稳定,实现整机作业无线控制。
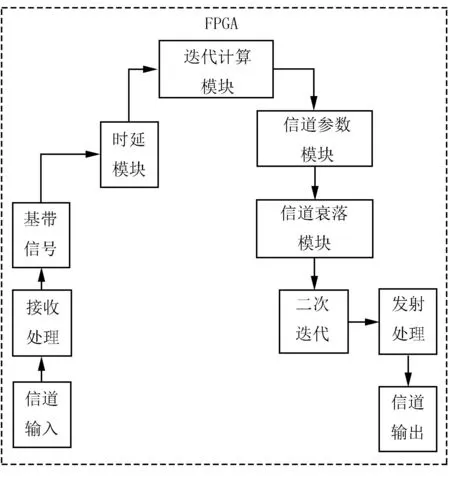
图5 植保机无线通信迭代硬件布置设计简图Fig.5 Hardware layout design diagram of the wireless communication iteration of the plant protection machine
3 整机通信作业
3.1 前置条件
基于上述迭代算法,进行无线通信信号识别设计。选定葱郁密度具有代表性的一般待喷施农田,天气与风速等条件良好,进行整机作业条件下的验证试验。同时,设定低空作业有效喷幅,给定主要前置条件:①整机试飞10min,各功能模块运行正常;②通信数据显示与输出正常;③承载药液量充足,确保试验过程的连续性。
3.2 过程分析
设定以逆时针方向为正,整机作业角度的飞行角度变化为[-25°,25°],匹配相应的信道衰减频率,得到迭代算法下的植保无人机作业试验通信系统关键监测数据统计,如表2所示。由表2可以看出:由于迭代算法的融入,干扰因素降低,可实现信道误码率控制在2.00%以下的良好指标。其中,当作业角度为15°时,信道衰减频率为18.44,信道误码率为1.93%;当作业角度为-25°时,信道衰减频率为18.61,信道误码率为1.96%。两个角度对应的信道误码率最大,且不超过2.00%,充分表明无线通信信号识别的准确性得到提升。
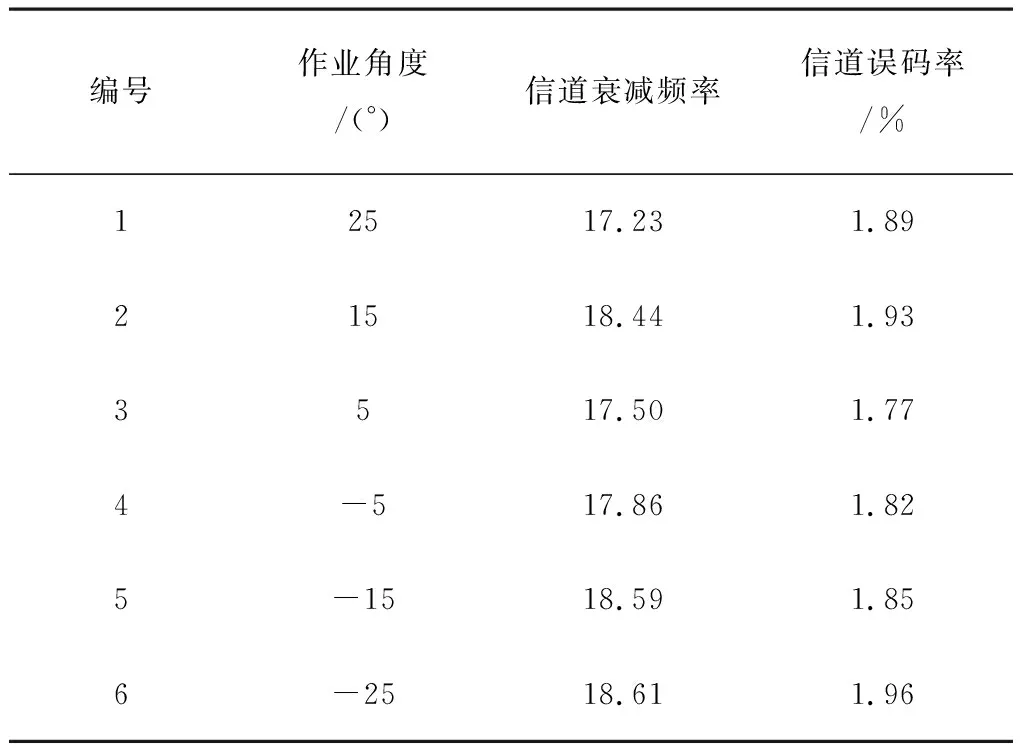
表2 迭代算法下的植保机作业试验通信系统关键监测数据统计Table 2 Statistics of key monitoring data of plant protection machine operation test communication system under the iterative algorithm
进行各通信信号参数的输出转换,选定时延率、信道误码率、传输稳定率、识别准确率及通信综合效率作为衡量参数,从而形成基于迭代算法应用信号识别的植保机性能参数效果对比,如表3所示。由表3可知:经过对通信信号进行精细化识别操作和迭代算法的合理导入,实现了信号时延率由3.50%降低至2.78%的良好效果,平均信道误码率由2.79%降低至1.87%,系统信号传输稳定率由91.00%提升至95.60%;考虑信道路径、功率传输等因素在内,其信号识别准确率由85.64%提升至94.58%,整机通信综合效率由迭代算法应用前的88.41%优化至96.93%,信号识别准度与效率提升效果明显。
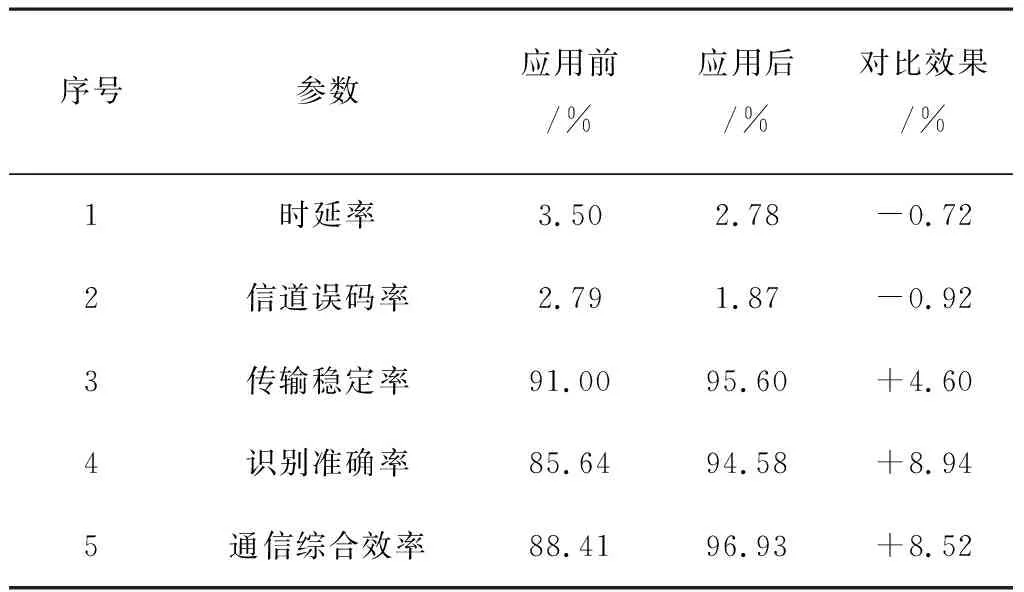
表3 基于迭代算法应用信号识别的植保机性能参数效果对比Table 3 Comparison of performance parameters of the plant protection machine based on iterative algorithm and signal recognition
4 结论
1)通过选定植保无人机的作业通信过程作为研究对象,应用成熟的迭代理论,针对其无线通信系统进行特性分析与迭代实施过程设计,形成基于迭代算法支撑的无线通信系统,是数学运算在无线通信领域的良好创新思路之一。
2)进行整机的规划路径及作业信号监测传送可行性试验论证,结果表明:基于迭代算法的科学应用,可实现有效降低通信识别过程中的误码,确保提升信号识别的准确率,实现无线通信综合效率显著优化的设计目标。
3)以数值分析的迭代计算为农机装备的改进基础,进行关联思维下的对比性实践,是未来农机装备智能化、精准化发展的方向,可为相关领域的技术突破提供较好的借鉴与指导。
