温室大棚溶解混施智能施肥机设计与实现
2024-01-11王铁广李文勤陈可飞方赛银
王铁广,李文勤,陈可飞,邢 凯,肖 洒,方赛银,李 明,2
(1.西南林业大学 机械与交通学院,昆明 650224;2.安徽工程大学 电气工程学院,安徽 芜湖 241000)
0 引言
近年来,我国现代农业不断发展,针对水资源与化肥资源同时短缺的情况,采取节水节肥方式是绿色农业发展的必由之路[1,2]。水溶性肥料是一种可以完全溶于水的多元复合肥料,可用于以喷灌、微喷灌、滴灌为主要施肥方式的灌溉施肥设备,分为固体和液体两种类型。固体水溶性肥料与液体水溶性肥料相比具有养分含量高、贮存和运输方便、包装要求低等优点,同时存在杂质相对高、溶解效率相对较慢的缺点[3-4]。按照固体水溶肥料的施肥要求,进行肥料高效溶解与水肥精确配比是大规模使用固体水溶性肥料的关键。
水肥一体化是施肥技术与灌溉技术融合发展的一项新技术,是精准施肥与精确灌溉相结合的产物,在现代农业发展中占有重要地位。施肥设备是水肥一体化系统的关键设备,决定着灌溉施肥质量[5-7]。目前,固体肥料溶解施肥设备不断发展创新。刘林等[8]开发了一种施用固体肥料的大田移动式精量配肥灌溉施肥一体机,用于大田固体肥料的溶解与定量施肥。夏华猛等[9]设计了一种溶解混施水肥一体化装置自动控制系统,使用单片机控制固体肥料进入肥料溶解罐的速度实现肥液EC值控制。张志洋等[10]设计了一种溶解混施水肥一体化装置,研究改变投肥方式对施肥装置肥液均匀性的影响。综上所述,针对适用于温室大棚溶解混施的智能施肥设备研制相对较少。
为此,结合农户对温室大棚精准施用固体水溶性肥料需求,设计了一种温室大棚溶解混施智能施肥机,以解决固体水溶性肥料配合智能施肥机使用难问题。工作时,施肥机使用肥料搅拌装置加速溶解肥料,吸取无杂质肥液进入管道,并采用模糊PID控制器控制电磁阀的占空比,动态调节肥料EC值,完成固体水溶性肥料精准施用。最后,通过样机试验验证方法的有效性,以解决小型农户精准施用固体水溶性肥的问题。
1 系统总体设计
温室大棚溶解混施智能施肥机系统由肥料搅拌单元、供水单元、吸肥单元及控制单元4部分组成,如图1所示。其中,肥料搅拌单元主要由搅拌容器、搅拌电机、平浆式搅拌器及吸肥管道组成,为吸肥单元提供完全溶解的无杂质水溶性肥液。供水单元主要由蓄水池、抽吸泵组成,为吸肥元件与灌溉管路正常运行提供动力。吸肥单元主要由文丘里管、电磁阀及混肥管道组成。电磁阀用来控制吸肥管路的通断,文丘里管将肥液吸入主管道经过混肥管道充分混合。控制单元主要由传感器、触摸屏、终端设备及PLC控制器组成。其中,传感器测量管道压力、流量以及肥液电导率,为肥液精准配比提供数据支持;触摸屏实现设备现场调控;PLC控制器主要完成触摸屏指令接收,传感器的数据采集与处理,对施肥机中的开关量进行控制,实现智能施肥机的高效运转。
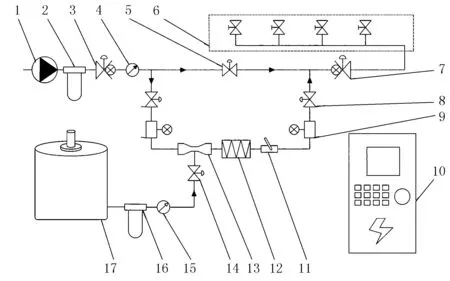
1.水泵 2.水源过滤器 3.减压阀 4.进水口流量计 5.主管道电磁阀 6.灌溉管道 7.持压阀 8.出肥管道电磁阀 9.出肥管道压力传感器 10.控制单元 11. EC值传感器 12.混肥管道 13.文丘里管 14.吸肥管道电磁阀 15.吸肥管道流量计 16.吸肥管道过滤器 17.搅拌装置 18.进水管道压力传感器 19.进水管道电磁阀图1 固体水溶性肥料灌溉施肥设备工作原理示意图Fig.1 Schematic diagram of the working principle of the irrigation and fertilizing application equipment for solid water soluble products
2 肥料搅拌装置设计
针对固体水溶性肥料的使用过程,未经过充分溶解的颗粒状肥料会影响肥料施用效果以及施肥设备的安全运行。为了加速固体肥料充分溶解,同时防止肥料中不容杂质吸入肥料管道堵塞施肥设备,设计了肥料搅拌装置,如图2所示。
肥料搅拌装置分为两种工作状态:状态a是对固体水溶性肥料进行搅拌时搅拌减速电机带动搅拌桨对搅拌容器内的肥料进行搅拌溶解,此时吸肥软管进肥端挂在桶口,避免干扰搅拌桨正常工作;状态b是吸肥软管进行吸肥时搅拌减速电机停止工作,吸肥软管浮子放入肥料桶内,使吸肥软管进肥口始终与肥液底面保持固定距离,避免未溶解杂质进入混肥管道,保证施肥设备的正常运行。
3 模糊PID控制系统设计
3.1 肥液EC模型分析
根据施肥设备的实际混肥特点,肥液混合模型可近似为典型的一阶滞后模型[11]。单通道施肥机在实际运行过程中,施肥设备肥液浓度的调控由文丘里管的吸肥量决定,此时文丘里管的吸肥量主要与吸肥电磁阀的占空比有关。智能施肥机机主管道进水口安装有水泵与减压阀,可以实现管道流量和压力基本恒定,将主管道进水量Q0与文丘里管的吸肥量Q1、完成混肥量Q2定义为常量。根据质量守恒定理,则
(1)
式中VA-施肥设备管路中肥液体积(L);
C(t)-混肥管道及施肥管路中肥液的浓度(mg/L);
C0-进水管道自来水浓度(mg/L);
C1-搅拌容器内肥料浓度(mg/L);
Q0-进水口流量(L/s);
Q1-吸肥管路吸肥量(L/s);
Q2-出肥管道出肥流量(L/s);
M(t)-电磁阀导通占空比(%)。
等式(1)左边是混肥管道及施肥管路肥液质量的微分,假定为流出文丘里管经过混肥管道进入施肥管路的肥料;右边是进水管道水的质量与文丘里管吸入的肥液质量之和减去出肥管道肥液质量。由于肥液EC值与肥液浓度成正比[12],则式(1)可变为
(2)
式中E(t)-混肥管道及施肥管路中肥液的EC值(mS/cm);
E0-进水管道自来水EC值(mS/cm);
E1-搅拌容器内肥料EC值(mS/cm)。
为简化混肥模型复杂程度,将自来水的EC值按约等于0处理,则式(2)进行拉普拉斯变换后得
(3)
根据施肥设备实际运行过程,入水管道压力310kPa时,吸肥管路最大吸肥量Q1=0.2L/s,出肥管道出肥流量Q2=0.87 L/s;搅拌容器内肥料EC值E1=6ms/cm,混肥管道及施肥管路中肥液的EC值E(t)=2.9ms/cm,施肥设备管路中肥液体积VA=18.6L,滞后时间12s。将上述变量带入式(3),得到EC值近似传递函数为
(4)
3.2 控制系统结构设计
温室大棚溶解混施智能施肥机控制系统主要由西门子S7-1200PLC、西门子模拟量拓展模块(SM1234型号)、西门子触摸屏(KT600型号)、EC传感器(量程0~20ms/cm)、电磁阀、水泵、搅拌减速电机、压力传感器及流量传感器等组成,结构如图3所示。
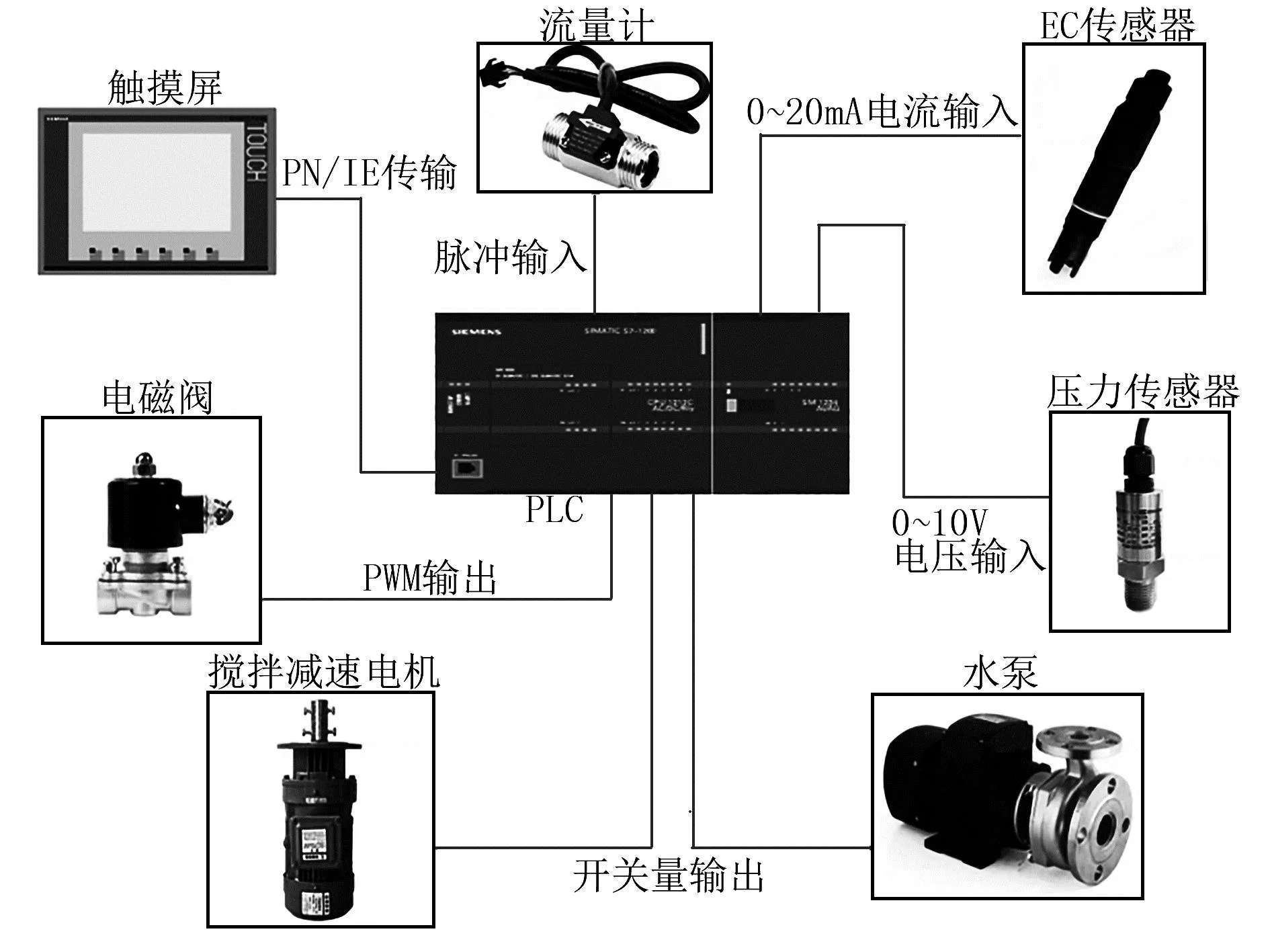
图3 固体水溶性肥料灌溉设备控制系统结构Fig.3 Control system structure for solid water soluble fertilizing irrigation equipment
PLC内置的高速计数器接入流量传感器NPN脉冲输入信号,根据传感器自身的流量与脉冲特性关系换算得到管道流量值;模拟量拓展模块输入类型分为电流和电压,EC值传感器使用系统默认的0~20mA电流信号输入,压力传感器选取0~10V电压信号输入,将输入的信号分别对应传感器的量程进行换算得到肥液的EC值和管道压力值。PLC以开关量输出的方式控制水泵与搅拌减速电机工作状态,满足进水管道流量稳定与肥料加速溶解的工作需求;通过PWM输出控制吸肥管道电磁阀占空比,将肥料注入混肥管道进行实时的EC值调控。PLC通过PN/IE接口与触摸屏进行信息交互,触摸屏完成对施肥设备各个传感器参数的实时监控,同时在线更改肥液EC参数值设定;根据当前设定值进行控制算法的参数调整,实现肥料浓度的有效调控。
3.3 PID控制器设计
在实际的工程应用中,PID控制系统是应用最为广泛的闭环控制系统[13]。其原理是:将被控对象的设定值与测量原件测量出的过程值进行比较,将差值输入PID控制器进行运算,执行元件根据控制器输出值进行调节。比例(P):PID控制器计算一个与误差成比例的项,单纯使用比例调节会使系统产生稳态误差。积分(I):PID控制器计算一个与误差积分成比例的项,使用积分控制消除纯比例调节产生的稳态误差。微分(D):PID控制器计算一个与误差导数成比例的项,根据偏差的变化速度进行调节,用于具有大滞后的控制系统。
智能施肥机使用西门子S7-1200PLC作为主控器,此款PLC集成有“PID_Compact”指令块,指令块的算法公式为[14]

(5)
式中Y-PID输出值;
Kp-比例增益;
s-拉普拉斯运算符;
b-比例作用权重;
w-设定值;
x-过程值;
TI-积分作用时间;
TD-微分作用时间;
a-微分延迟系数;
c-微分作用权重。
3.4 模糊PID控制器设计
模糊PID控制器由模糊控制器与PID控制器两部分组成,结构如图4所示。
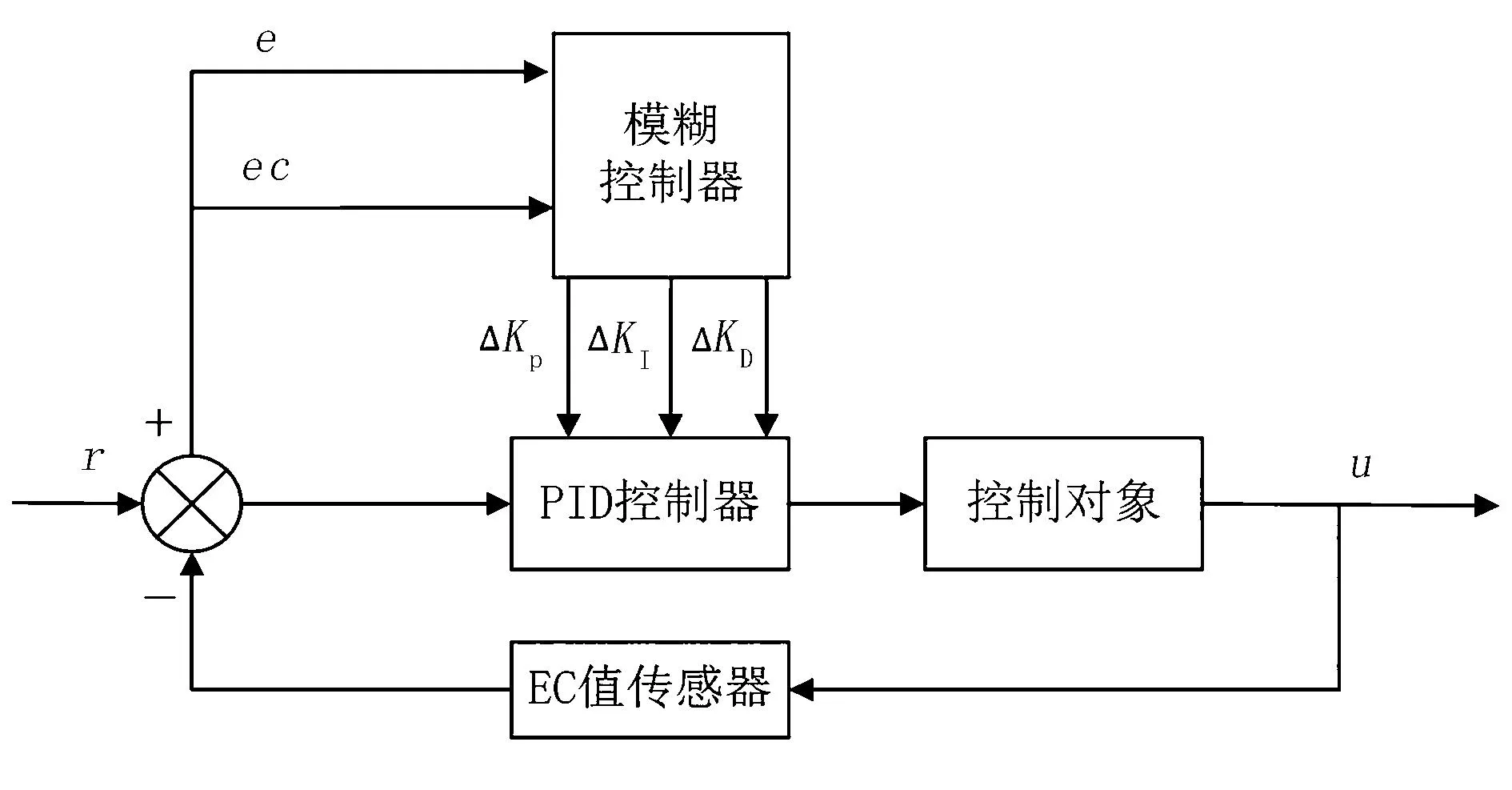
图4 模糊PID控制器结构框图Fig.4 Block diagram of the fuzzy PID controller structure
系统将EC传感器的采样值与设定值的偏差e输入PID控制器,同时将偏差e和偏差变化率ec输入模糊控制器。经过模糊化和模糊推理以及解模糊后,得到PID控制器的3个参数修正量ΔKP、ΔKI、ΔKD,这3个参数分别用于在线修改式(4)中的KP、TI、TD,实现电磁阀占空比控制调整肥液EC值。
3.4.1 模糊控制器参数设计
EC值偏差Ee的计算过程为
(6)
其中,Eξ(t)为期望EC值;E(t)为实际EC值。
EC值偏差变化率Eec的计算过程为
(7)
其中,Es为采样时间。
因此,偏差Ee的基本论域为[-6,6],偏差变化率Eec的基本论域为[-3,3]。选取ΔKP、ΔKI、ΔKD基本论域为[-0.3,0.3]、[-0.06,0.06]、[-3,3],将输入量和输出量模糊子集取为{NB(负大)、NM(负中)、NS(负小)、ZE(零)、PS(正小)、PM(正中)、PB(正大)}。基本论域需要通过量化因子将基本论域离散化转到模糊子集的模糊论域中,量化因子计算如式(8)、(9)所示[15],得到输入、输出量量化论域为{-3,-2,-1,0,1,2,3}。
(8)
(9)
式中Ke-误差量化因子;
Kec-误差偏差量化因子;
e1、e2-偏差e的基本论域;
ec1、ec2-偏差变化率ec的基本论域。
3.4.1 隶属度函数设计
隶属度函数的形状对模糊控制器的性能影响很大,采用计算量小、内存占用小的三角分布隶属度函数,如图5所示。
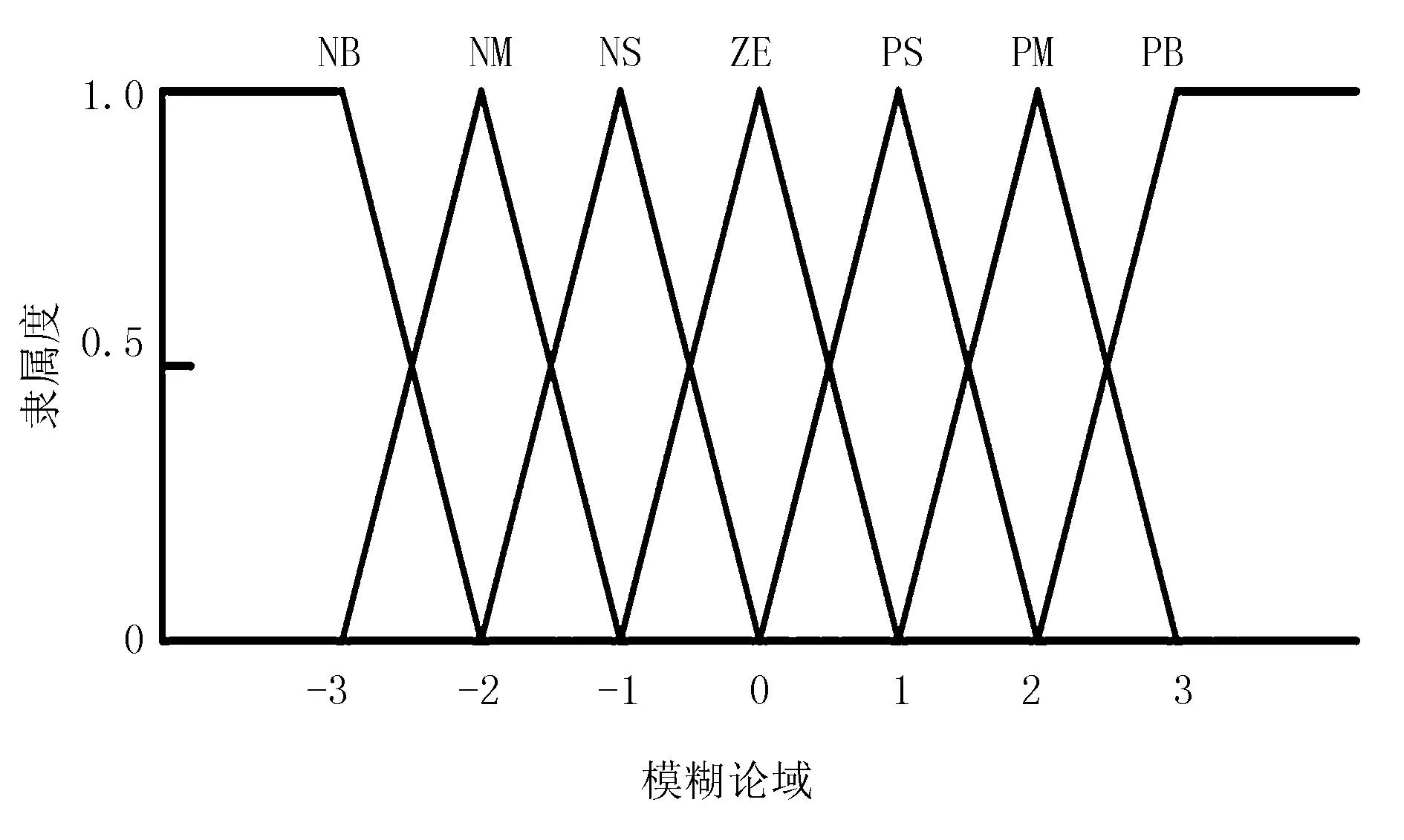
图5 隶属度函数Fig.5 Affiliation function graphs
3.4.2 模糊控制规则建立
为使模糊PID控制器能够稳定、可靠地控制肥液EC值,根据智能施肥机中EC值变化规律和使用人员的经验,综合考虑智能施肥机系统的稳定性、动态过程平稳性及响应速度等因素建立控制规则表[16-17],如表1所示。
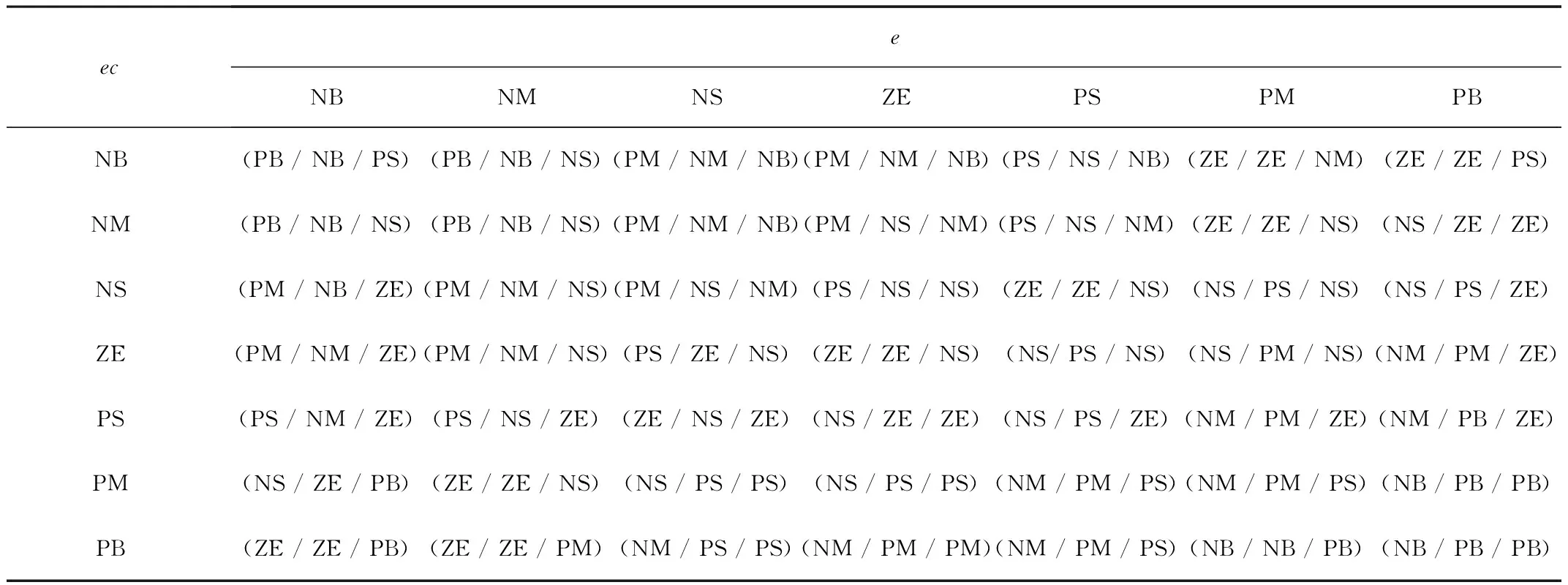
表1 参数KP、KI、KD糊控制规则Table 1 Parameters KP,KI,KD paste control rules
3.4.3 去模糊化
在智能施肥机控制系统中,通过模糊推理得到PID的3个控制参数是模糊量,并分别根据KP、KI、KD的j(j=1,2……,49)条模糊规则进行三者的隶属度μKP(j)、μKI(j)、μKD(j)计算,即
μKP(j)=min{μr(j)(e),μr(j)(ec)}
(10)
μKI(j)=min{μr(j)(e),μr(j)(ec)}
(11)
μKD(j)=min{μr(j)(e),μr(j)(ec)}
(12)
对于实际的模糊PID控制系统,要求模糊控制器最终传送给PID控制器的是精确量,因此需要进行去模糊化处理。本研究采用加权平均法进行去模糊化操作[18],则
(13)
(14)
(15)
其中,μKP(j)、μKI(j)、μKD(j)为对应的模糊子,最终求得ΔKP、ΔKI、ΔKD。PID控制参数KP、KI、KD的计算公式为
(16)
其中,KP0、KI0、KD0为KP、KI、KD的初始值。
4 试验与应用
试验在西南林业大学试验场地进行,试验装置如图6所示。试验时,通过水泵与减压阀为进水管道提供恒定压力,保持进水管道压力310kPa,吸肥管路最大吸肥量Q1=0.2L/s,肥料搅拌装置将矿源黄酸腐钾型固体颗粒水溶肥搅拌至完全溶解配,制成EC=6ms/cm的溶液。实际试验过程中,使用触摸屏设定目标EC值为母液浓度的35%,通过TIA-Portal-V15软件进行系统响应曲线采样,采样周期2s,连续测量3min。图7为两种控制策略系统响应曲线的对比图。

图6 固体水溶性肥料灌溉施肥设备Fig6 Solid water soluble fertilizers irrigation and application equipment
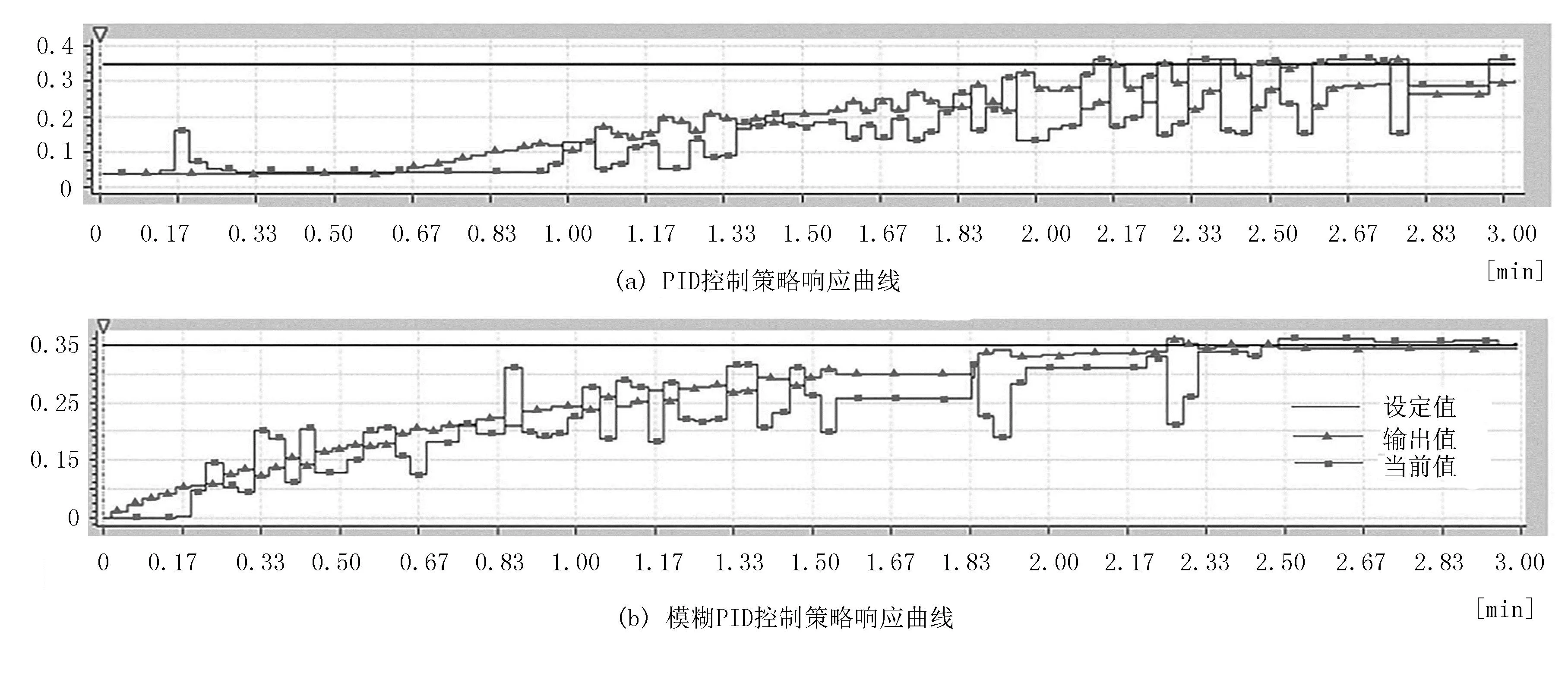
图7 控制策略系统响应曲线Fig.7 Control strategy system response curve
由图7可知:在同一目标EC值设定下,模糊PID控制系统相较于纯PID控制系统设定值更新后,可直接控制系统进行输出且达到稳态时间缩短40s左右,具有系统响应快、EC值波动幅度小的优势,模糊PID控制策略配比水肥所需时间130~140s。这表明,使用模糊PID控制系统可以满足水肥配比灌溉需求。
5 结论
针对固体水溶性肥料自动化精准施肥问题,设计了一种用于固体水溶性肥料灌溉施肥设备。设备配有的肥料搅拌装置满足固体水溶性肥料的高效溶解与无杂质肥料母液输出,肥液EC值精准调控系统在使用PLC自身集成的“PID_Compact”模块的基础上将模糊控制应用于PLC。试验结果表明,系统在响应速度和超调量方面满足实际需求。
