玉米收获机虚拟样机的仿真作业研究
2024-01-11郑思思王小花
郑思思,王小花
(唐山科技职业技术学院,河北 唐山 063000)
0 引言
传统的玉米收获机设计思路为:选定设计方案→零件计算校核→样机制造→样机测试→设计方案改进。整个设计流程复杂,特别是样机测试完成后需要对原设计方案进行改进,耗时费力[1-2]。随着计算机性能的提高,虚拟现实技术发展越来越成熟。目前,虚拟现实技术已经开始应用于大型农机的驾驶员培训[3-4]。如果将虚拟现实技术应用于玉米收获机的设计,进行虚拟环境下的测试与改进,可以显著提高整个设计流程效率,显著降低设计成本[5-6]。为此,通过对环境系统和收获机建模,并根据真实环境中收获机和环境因素的相互作用方式,建立环境系统和收获机交互模型,最终在虚拟环境中对收获机的关键参数爬坡性能和制动性能进行测试,以期为虚拟现实技术在玉米收获机设计中应用提供新思路。
1 系统组成
为了实现玉米收获机在虚拟环境中的作业仿真,提高收获机设计及改进效率,设计了虚拟样机仿真系统,如图1所示。首先,建立VR虚拟环境系统,实现玉米收获机工作场地环境设置,包括地形模型、地高模型和地物模型;其次,将收获机运行过程参数化,包括发动机驱动模型、收获机转向模型和制动模型等;再次,完成收获机模型和VR虚拟工况环境模型的交互,基于ODE开源物理引擎[7-8],建立收获机和虚拟环境模型的Body组件,采用Hinge()运动约束铰函数实现收获机自身各部分间的相对运动,完成收获机和VR环境交互作用设计流程;最后,对系统进行爬坡测试和制动测试,完成虚拟环境下对于收获机性能的测试。
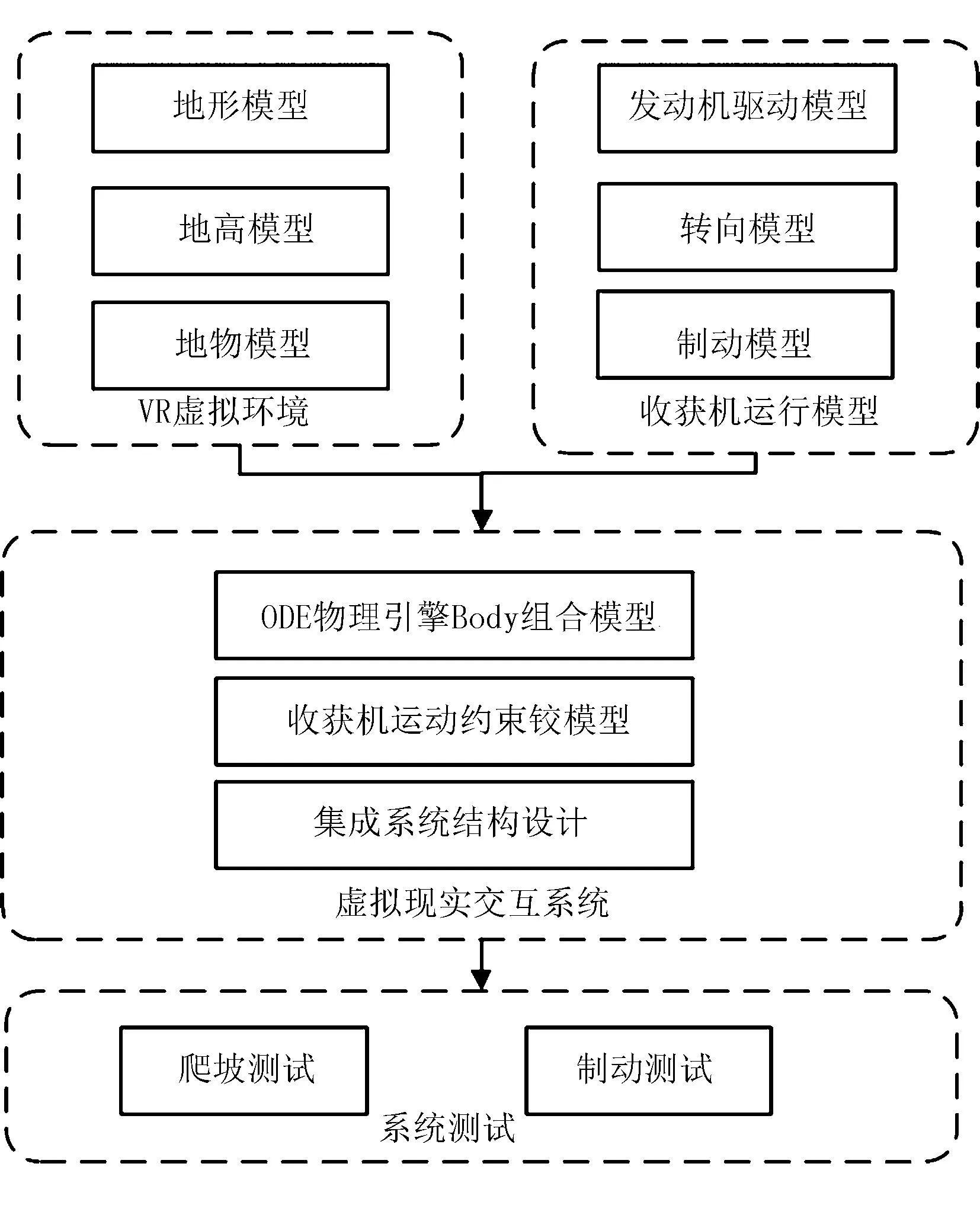
图1 系统组成Fig.1 Structure of system
2 VR环境设计
现实环境中,玉米收获机会遇到各种路况(包括地形起伏、地垄和排水沟等),也会遇到建筑物及植物等。因此,在虚拟样机系统中需要还原玉米收获机的工作环境。
VR虚拟场景再现是将现实中玉米收获机工作过程中遇到的各种地形和地物模型化,VR虚拟环境设计如图2所示。其中,地形模型包括障碍、排水沟,地垄;建立地高模型,实现颠簸路面和坡路。地物模型为收获机运行过程中遇到的植物和建筑物,植物包括树木,农作物等,建筑物包括楼宇、大棚和警示牌等。
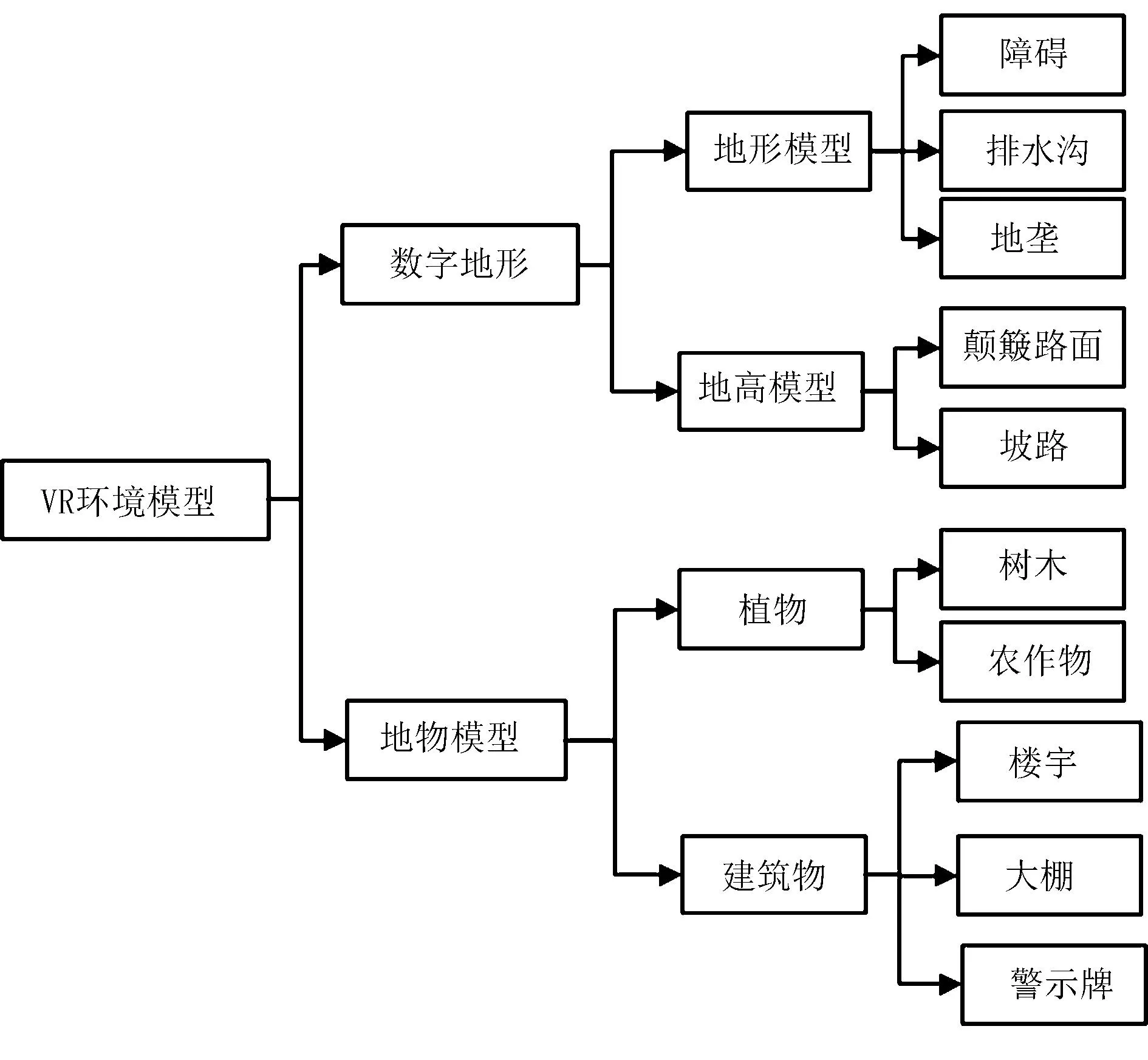
图2 VR虚拟环境设计Fig. 2 The design for VR virtual environment
数字地形通过在Multigen Creator[9-10]环境下建立地形函数来完成,地形函数Kp为
Kp=fk(xp,yp),k=1,2,...,n;p=1,2,...,m
(1)
其中,xp、yp为地图平面坐标,将所有地图坐标排列成一维数列,则xp、yp坐标在该数列中的序号为p,整个一维数列中坐标点个数为m;fk为第k地形的函数,地图中共含有n中地形函数,包括障碍、排水沟和地垄等。
数字地形中另外一个重要模型设置为地高模型,通过地高模型实现颠簸路面和坡度设置。地高模型函数为地图平面坐标(xp,yp)对应的高度为Kzp,即
Kzp=fz(xp,yp)
(2)
将坐标一维化后,可以等到整个地图的一维地形高度向量{Kzp,p=1,2,...,m},进而实现数据简化存储。
地物模型的建立广泛采用外部引用、实例化和布告板技术。由于树木和农作物等在VR虚拟场景建设中应用非常成熟,采用外部引用的方法可以有效降低数据量,精简系统架构[11-12]。同时,树木和农作物等还具有多次重复出现的特点,可以引入实例化方案。首先,建立一棵草的引用模型,认为草地为草模型及其副本组成;最后,修改草模型,改变所有副本,进而改变整个草坪,既降低了系统修改难度,又节约了系统内存空间[13]。对于建筑物模型,则采用布告板技术,绘制一个带贴图的矩形区域,并保证每帧矩形都是正对视点,从而实现了立体效果。
3 玉米收获机运行模型
工作时,玉米收获机由发动机提供有效功率和有效转矩,通过方向盘控制转向油缸,进而控制转向机构实现转弯动作,通过制动踏板完成减速和停止;发动机提供动力,转向机构实现转向,刹车系统实现减速和停止,进而实现玉米收获机的基本动作。虚拟系统同样要实现玉米收获机的基本动作,则应建立发动机动力模型、转向模型和制动模型,进而实现玉米收获机自身控制模型。
3.1 发动机动力模型
发动机为玉米收获机提供动力,其有效转矩决定收获机轮上扭矩以及克服泥泞路况能力,也决定收获机加速性能以及收获机的工作效率和玉米承载能力[14-15]。根据现实中玉米收获机发动机工作状况,建立发动机输出有效功率模型和有效转矩模型,进而将模型数学表达式引入虚拟运行系统。现实工况下发动机有效功率和有效转矩如图3所示。
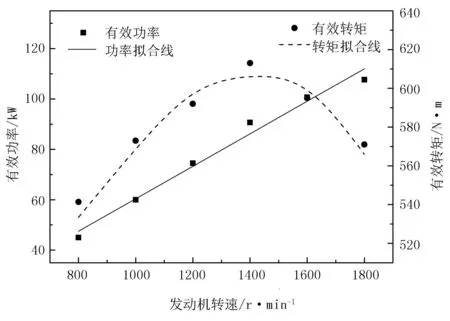
图3 发动机动力模型Fig.3 The power model for engine
由图3可知,有效功率随着发动机转速呈线性递增趋势。对其进行线性拟合,结果如式(3)所示,拟合决定系数R2达到0.9833。
y=0.0645x-4.1162
(3)
图3中,随着发动机转速的升高,有效扭矩为先增加后降低趋势。对其进行二次多项式拟合,结果如式(4)所示,拟合决定系数R2=0.9596。两模型拟合决定系数表明:在发动机转速为800~1800r/min区间内,可以很好地表征发动机有效功率和有效扭矩。
y=-0.0002x2+0.535x+232.58
(4)
3.2 收获机转向与制动模型
玉米收获机转向机构工作时,方向盘控制转向油缸长度,转向油缸驱动转向轴转动,进而通过控制方向盘转动角度,实现对于转向轮的转向控制。制动系统的制动力矩和制动踏板踩下深度成正比关系,基于上述原理,建立制动模型。
方向盘的转动角θ范围为[-532o,532o],对应的油缸伸长量x范围为[60mm,60mm],二者关系如图4所示。
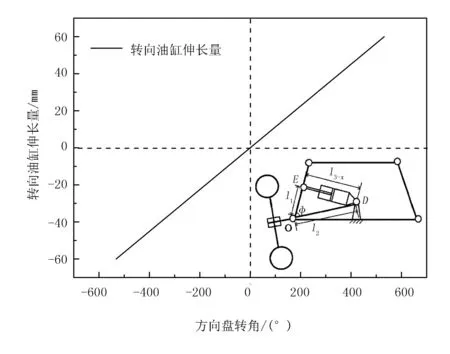
图4 玉米收获机转向模型Fig. 4 Steering model for corn harvester
方向盘转向角和油缸伸长量成线性分布,则转动角θ和油缸伸长量x一阶微分关系为
(5)
由图4可知:油缸一端采用铰接的方法固定在机架铰接点D上,伸长端铰接在转向连杆铰接点E上;转向连杆铰接点E到转向轮轴铰接点O之间的距离为l1,机架铰接点D到转向轮轴铰接点O之间的长度为l2,机架铰接点D到转向连杆铰接点E之间的距离为l3-x,x为转向油缸伸长量。因此,油缸伸长量x和转向轮转角Φ之间的关系以及方向盘转动角θ和转向轮转角Φ之间的关系分别为
(6)
(7)
玉米收获机制动力矩T和制动踏板踩下行程L成正比关系,最大制动力为Tmax,制动踏板最大行程为Lmax,则制动力矩T和制动踏板踩下行程L模型为
(8)
4 虚拟现实交互控制系统
虚拟现实的交互控制是将已经完成的环境VR设计和玉米收获机数学模型按照真实环境中的相互作用,交互完成一个完整的虚拟系统。本系统基于ODE(Open Dynamics Engine) 开源物理引擎进行设计,需要实现玉米收割机导向轮、驱动轮和收割部件与机体之间的相互运动,再将已经完成的环境VR设计和玉米收获机模型,集成在虚拟现实系统中。
4.1 模型物理属性的实现
玉米收获机的虚拟交互系统包括收获机模型和VR虚拟环境,VR虚拟环境包括地形模型和地物模型。本虚拟现实系统基于ODE开源物理引擎进行实现,将每个模型的多种特性梳理成 “Body”组合实体,如图5所示。其中,“Body”组合实体包括固有属性和变化属性。固有属性包括材料、质量和转动惯量属性,变化属性则包括位置、速度和旋转矩阵等。
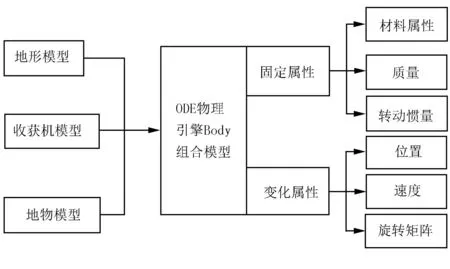
图5 模型物理特性的实现Fig.5 The realization of physical characteristics for model
ODE开源物理引擎提供多种关节类型,包括一自由度关节Hinge()和两自由度关节Hinge2()函数等。设收获机前进方向为y轴正方向,驱动轴转轴方向为x轴方向,收获机垂直向上为z方向。其中,驱动轮只绕轮轴进行转动可以采用Hinge(Jx)表示;导向轮既绕着x轴方向转动,又绕着z方向转动,因此采用自由度关节Hinge2(Jx,Jz)表示;收割台整体绕x轴转动,可以表示为Hinge(Jx);方向盘则沿着z轴转动,可以表示为Hinge(Jz)。至此,实现玉米收获机各部分之间相对运动。
4.2 虚拟现实交互控制流程
虚拟现实交互控制是实现玉米收获机模型和VR环境模型之间的交互,流程如图6所示。
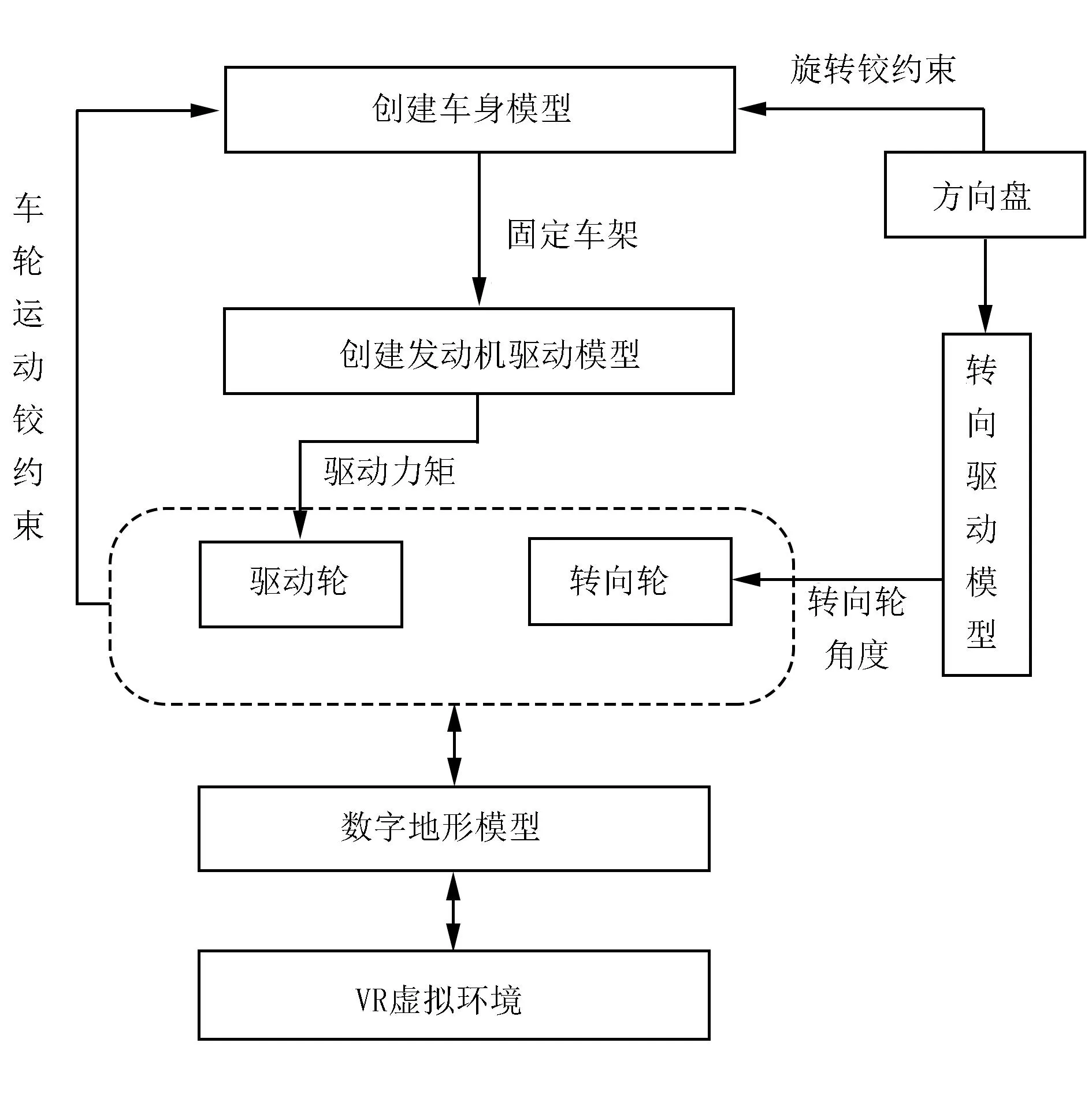
图6 虚拟现实交互系统实现流程Fig. 6 The flow for the achievement of virtual reality interactive system
5 系统测试
基于ODE开源物理引擎实现了玉米收获机自身相对运动以及和VR环境模型的交互,进而实现了玉米收获机的虚拟样机系统。上坡性能和制动性能是玉米收获机的两大关键性能参数,现采用本虚拟样机系统对玉米收获机的上坡性能和制动性能进行测试,结果如图7所示。
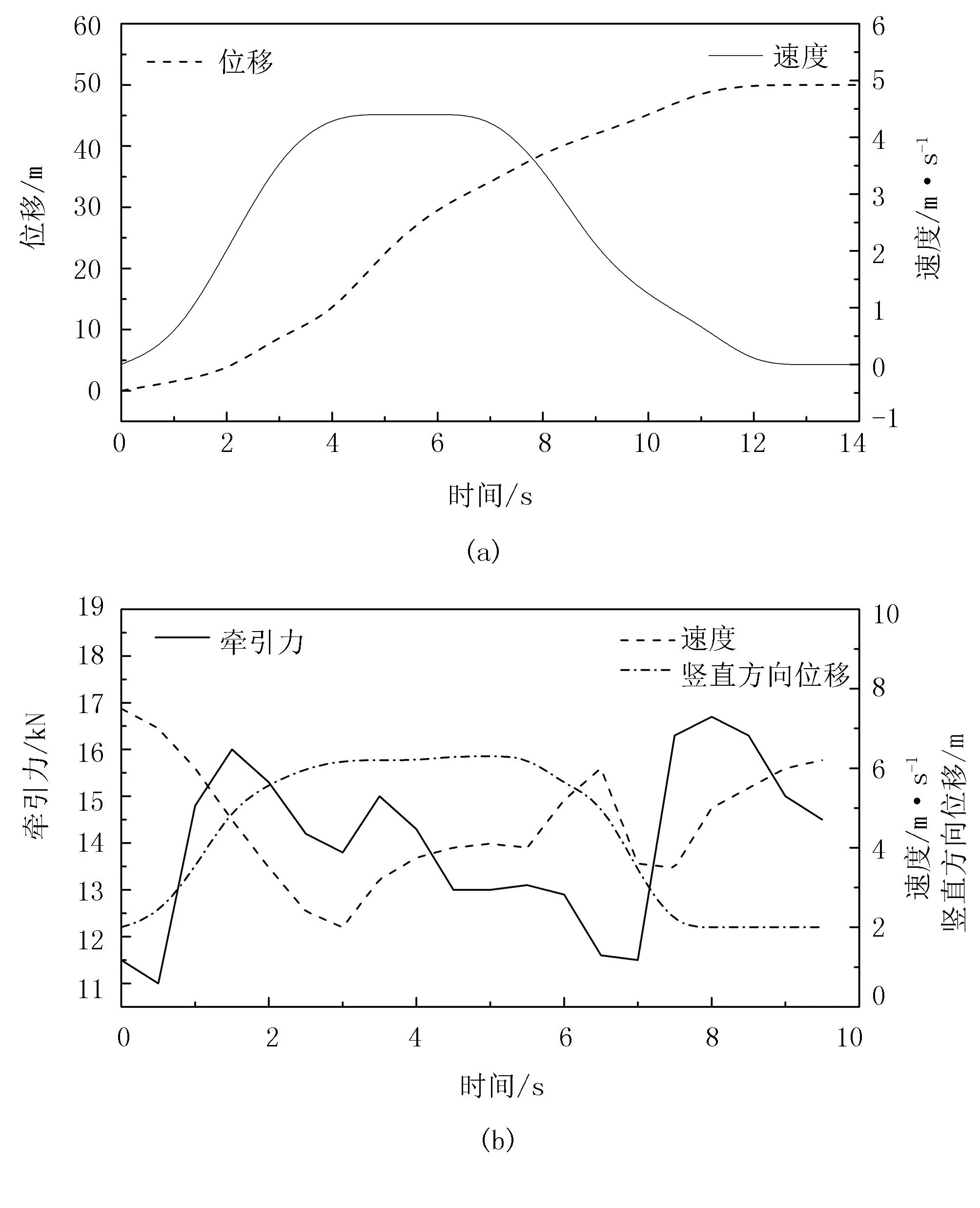
图7 虚拟样机系统仿真测试Fig.7 The simulation test for virtual prototype system
由图7(a)可知:在0~4s区间内,发动机持续输出功率,收获机以0.98m/s2的加速度进行加速,速度曲线为快速上升趋势,位移曲线持续上涨;在4~6.5s区间内,收获机处于匀速状态,速度曲线维持不变,而位移曲线持续上升;在6.5~12s区间内,收获机受到4800N·m的制动力矩,平均加速度为-0.64m/s2,总制动长度为18m,表明玉米收获机制动和加速性能良好。
由图7(b)可知:在0~2s内处于上坡路段,测试牵引力不断上升,竖直方向位移不断增加,而速度处于下降阶段;在2~6s内玉米收获机处于坡顶,此时牵引力开始下降,速度也随之下降;在3~3.5s内牵引力增大,速度随之增大,在3.5~4.5s内牵引力下降,同时速度区域平稳;在4.5~6s内,牵引力处于平稳状态,速度也进入平稳状态;6~8s内处于下坡状态,期初牵引力较低,造成在下坡路段上速度不断下降;在7~8s内,牵引力提高,速度开始提高;8~10s区间,处于坡下平路,牵引力逐步在高位开始下降,而速度逐步升高。虚拟样机测试结果表明:玉米收获机速度响应迅速,且具有良好的爬坡能力。
6 结论
为了实现玉米收获机的虚拟设计与性能测试,设计了收获机虚拟样机系统。首先,进行VR环境设计,以及数字地形模型和地物模型设计,且数字地形在Multigen Creator 环境中通过地形函数实现,地高模型基于地高函数实现,并形成一维地高向量;其次,根据实际工况完成玉米收获机模型,有效功率采用线性函数进行拟合,拟合决定系数R2=0.9833,有效转矩采用二次多项式函数进行拟合,拟合决定系数R2=0.9596,建立收获机转向模型和制动模型;再次,基于ODE建立虚拟现实交互控制系统,收获机各部件采用铰链函数Hinge()实现相对运动,进而建立虚拟现实交互系统;最后,利用虚拟样机对玉米收获机制动性能进程测试,表明玉米收获机制动和加速性能良好。
