露天带式输送机巡检机器人解决轨道热胀冷缩问题设计
2024-01-11张志宏张振军赵新哲
张志宏 张振军 赵新哲
(准能选煤厂,内蒙古 鄂尔多斯 017100)
我国作为世界第一大煤炭生产及消费国,据统计,2020 年原煤产量高达39.0 亿t。露天带式输送机作为矿井正常生产的重要机械设备之一,其具有耗电低、工作阻力小、运行效率高、输送量大、承载能力强、输送距离长等优点。近些年来,随着煤矿行业生产机械化程度的提高,带式输送机安全运行直接影响着煤炭开采生产的质量和效率[1-3]。目前露天带式输送机主要通过人工巡检的方式进行故障检查,存在实时性差、检测效率低、主观因素强等问题,因此自动化程度高、可靠性强、检测便利的巡检机器人逐渐取代人工巡检。
准能选煤厂位于内蒙古鄂尔多斯,露天带式输送机全线长度8 km,人工巡检工作量大,选煤厂采用巡检机器人替代人工巡检。巡检机器人采用吊轨式设计,轨道用高强度铝合金材料制成,采用钢结构吊架吊装轨道并固定于输送机两侧,如图1。鄂尔多斯春秋两季气温范围一般在-5~5 ℃,冬夏两季气温范围一般在-25~35 ℃,全年最大温差可达60℃左右。根据金属热胀冷缩的特性[4],如此巨大的温差造成长度8 km 的轨道在长度方向热胀冷缩累计的位移量相当大,且由于轨道处于刚性固定状态,此位移量无法释放,随之产生的热应力则会造成轨道翘曲变形或拉伸断裂。针对此情况,准能选煤厂巡检机器人轨道首先采用分段式拼接方案,将8 km长度的轨道切分为多段,每段轨道长度为2 m,每端轨道接头处预留伸缩缝。最终经过实践验证,此设计方式的轨道对热胀冷缩的适应能力较差,在极限高温情况下,轨道伸长较大,两段轨道接头处的伸缩缝无法适应,接触头顶死,应力造成轨道接头处屈服,接头处会出现轨道翘曲;而在极限低温情况下,轨道整体收缩,两段轨道接头处伸缩缝变大,在轨道接头出现较大的缺口,接头处的翘曲与缺口均会影响巡检机器人的通过性,造成机器人在接头处打滑及卡死。为此,准能选煤厂在前文方案基础上优化,设计思路分为两点:第一点考虑轨道安装的时间,根据鄂尔多斯气温情况,将轨道的安装时间控制在全年气温中间位置,如春秋两季,在春秋两季选择合适时间安装,环境温度选择在5 ℃左右,使轨道由于热胀冷缩特性产生的位移量相对降低了一半。第二点则考虑全新设计伸缩式柔性接头,伸缩式柔性接头用于两段轨道之间的对接,替代原有的伸缩缝设计,保证接头处无缝隙,而伸缩式柔性接头在受到沿轨道长度方向的热应力时,可以自由伸缩(类似弹簧机构),不因为轨道伸长或缩短产生的热应力造成轨道接头处翘曲或者伸缩缝增大。通过上述方案,全年极端气温情况下轨道接头处均紧密连接且平整,无翘曲,无缝隙,保障了巡检机器人的运行通过性,解决了准能选煤厂因轨道热胀冷缩带来的机器人运行稳定性问题。
1 巡检机器人接头设计方案
轨道原有接头方案为预留伸缩缝,新方案为伸缩式柔性接头方案。伸缩式柔性接头方案主要特点是在两段轨道之间加入伸缩式柔性接头,替代原有的预留伸缩缝。伸缩式柔性接头具备三个关键技术点:1)伸缩式柔性接头可以连接轨道,作为两段轨道之间的过渡件将2 m 一根的轨道连接起来,使露天带式输送机全线8 km 的轨道接头处均无缝连接;2)伸缩式柔性接头在重力方向具备相当的强度及刚度,可支撑机器人运行时滚轮压在接头处的重力;3)伸缩式柔性接头可以补偿轨道因热胀冷缩带来的位移量(伸长与缩短),同时不产生较大的热应力。根据上述特点,伸缩式柔性接头需要具备抵抗一定的重力方向压力的强度及刚度,同时需要在轨道长度方向具有较低的刚度,整体结构在弹性变形范围内具备较大的位移量,在设计时需要综合考虑,根据应用场景选择最优的刚强比[5],同时结构上设计需要考虑沿轨道长度方向具备更大自由度。设计思路借鉴弹簧与机床风琴罩的基本原理,伸缩式柔性接头设计为矩形截面,重力方向具备一定的抗弯性能,同时伸缩式柔性接头设计有多层褶皱,沿轨道长度方向受力时,每层褶皱转折处类似铰链,可以适应一定程度的转动弹性形变。当接头两端的轨道因为温度变化发生热胀冷缩时,伸缩式柔性接头通过褶皱可以补偿两端轨道的变形量,如图2。

图2 轨道对接方案
伸缩式柔性接头采用6061-T6 高强度铝合金设计,截面设计为矩形,壁厚2 mm,截面高度180 mm,宽度100 mm,可承担一定的垂直于轨道方向的压力,沿轨道长度方向设计有多层褶皱,多层褶皱夹角为60°,每层褶皱的转折处为圆角过渡,褶皱可以转折处为铰点旋转。根据力学分析,伸缩式柔性接头两端的轨道热胀冷缩产生的位移对其产生拉伸或压缩时,虽然褶皱具备受力可旋转特性,但是由于伸缩式柔性接头截面为矩形截面,伸缩式柔性接头整体具备较高的刚度,无法完全响应变形,同时会产生较大的一次应力、二次应力及峰值应力(局部应力集中),根据应用特性,需要降低褶皱刚度,增大柔性,使褶皱受力时更易发生旋转,满足接头的整体伸缩适应性要求,同时满足一次应力、二次应力及峰值应力的力学性能要求[4-7]。考虑上述原因,在每层褶皱转折处设计腰孔,通过改变截面形状,减小褶皱沿轨道长度方向的刚度[8],提高伸缩式柔性接头沿轨道长度方向的适应变形的能力。且褶皱转折处由于弹性变形,具有较高的一次应力、二次应力及峰值应力(应力集中),通过在转折处设计腰孔,腰孔尺寸为20 mm×8 mm,结构在发生变形时,由于变形产生的应力在此处释放(降低了峰值应力(应力集中),如图3。当两侧轨道受热伸长时,伸缩式柔性接头两侧受力时褶皱可以以转折处为铰点发生弹性变形(旋转),接头的整体状态就是长度方向收缩,可以补偿两端轨道伸长的位移量,防止两端轨道顶死而发生翘曲;当两侧轨道遇冷收缩时,伸缩式柔性接头也同样以转折处为铰点发生弹性变形(旋转),接头的整体状态则是长度方向伸长,可以补偿两端轨道收缩的位移量,防止轨道接头处产生缺口。伸缩式柔性接头由于矩形截面设计,在垂直于轨道方向具备一定的结构强度与刚度,可以承担机器人通过时滚轮产生的重力,如图4。
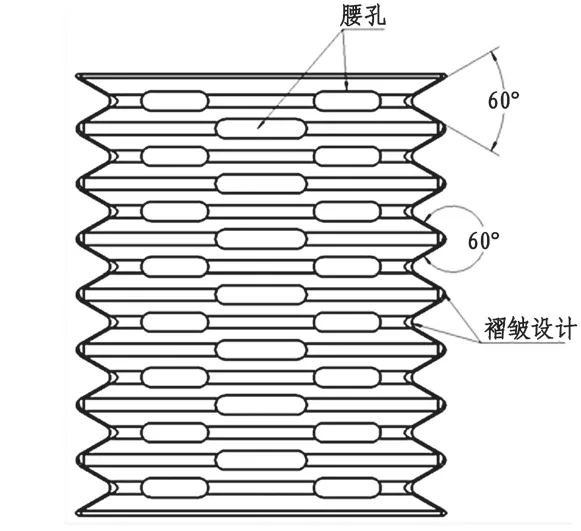
图3 伸缩式柔性接头褶皱设计
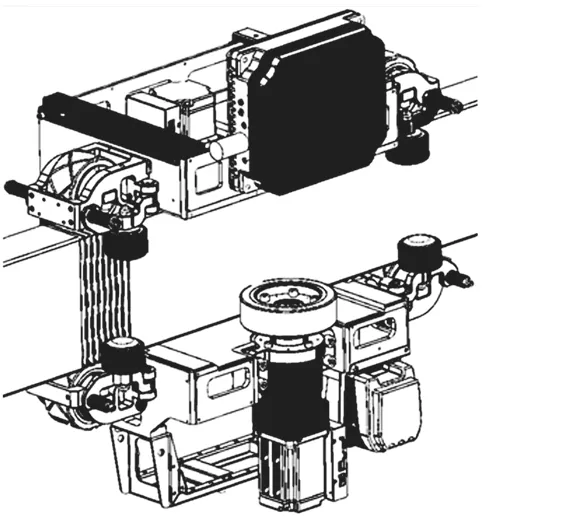
图4 机器人滚轮通过接头
2 伸缩式柔性接头设计校核
根据上述设计方案,伸缩式柔性接头需要承受机器人通过时滚轮产生的重力,同时可补偿轨道由于热胀冷缩产生的位移量。两种情况下伸缩式柔性接头工作状态均处于弹性形变区间,不出现塑性变形。
巡检机器人运行轨道采用6061-T6 铝合金制作而成,每段轨道长度2 m。6061-T6 铝合金线膨胀系数为23.6×10-6/℃,根据前文所述的室外气温情况,伸缩式柔性接头和轨道选择在春秋两季安装调试,安装时环境温度选择在±5 ℃左右。伸缩式柔性接头补偿量相对为±0,在极端温度下(冬季最低温度在-25 ℃,夏季温度在35 ℃左右),出现的最大相对温差为30 ℃左右,根据线膨胀计算公式,2 m 的轨道最大伸缩相对变化量为±1.416 mm,伸缩式柔性接头位于两段轨道中间,每段轨道的最大伸缩量为±1.4 mm,所以伸缩式柔性接头两端头各需要满足弹性变形±1.4 mm。机器人为两轮驱动,整机质量约60 kg,机器人为两轮支撑驱动,运行时接头处只承担机器人单轴重量,根据支反力学计算,接头处承担机器人的单轴重力约为30 kg。如图4。
根据上述设计方案,伸缩式柔性接头的褶皱式设计理论上已经可以实现自适应轨道伸缩量需求,只是由于整体刚度原因及应力集中原因,需要在伸缩式柔性接头上增加腰孔,但是增加腰孔会增加伸缩式柔性接头的加工难度与整体成本,需要综合评估两种情况的力学性能。下文将对伸缩式柔性接头的方案进行对比,分别对比伸缩式柔性接头未设计腰孔与设计腰孔两种情况下产生的响应位移量比例(实际整体位移量与施加位移量的比值)、一次应力、峰值应力,以此判断是否必须采用增加腰孔方案。
1)伸缩式接头热胀冷缩有限元仿真方案
约束:伸缩式柔性接头中部施加无摩擦支撑,开启弱弹簧。
边界条件:伸缩式柔性接头的两种设计两端分别施加±1.4 mm 位移量载荷。
结果:伸缩式柔性接头带腰孔设计排除应力奇异[9],应力线性化[10-11]后,危险截面处膜应力约为210 MPa,峰值应力400 MPa,响应比例约90%。伸缩式柔性接头无腰孔设计,排除应力奇异,应力线性化后,危险截面处膜应力约为230 MPa,峰值应力650 MPa,响应比例约50%。见表1。
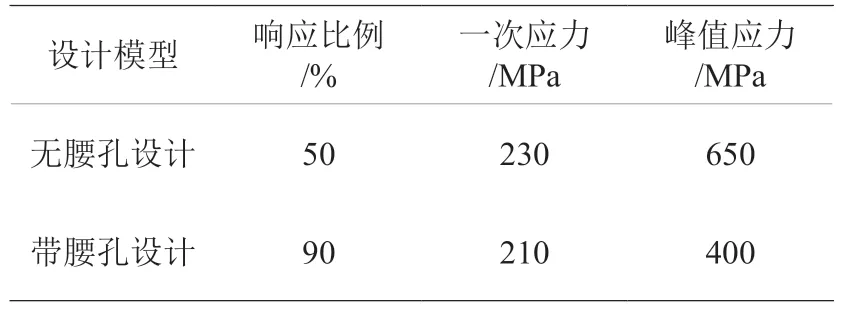
表1 伸缩式柔性接头热胀冷缩工况位移与应力对比
2)伸缩式接头承重有限元仿真方案
约束:固定伸缩式柔性接头两端。
边界条件:在接头中部施加300 N 集中力。
结果:伸缩式柔性接头带腰孔设计排除应力奇异,应力线性化后,危险截面处膜应力约为20 MPa,峰值应力90 MPa。伸缩式柔性接头无腰孔设计,排除应力奇异,应力线性化后,危险截面处膜应力约为18 MPa,峰值应力83 MPa。见表2。

表2 伸缩式柔性接头重力工况应力对比 MPa
根据《铝及铝合金挤压棒材》(GB/T 3191-2019)标准,所用6061-T6 铝合金屈服强度≥240 MPa、抗拉强度≥260 MPa。根据上述仿真结果分析,伸缩式柔性接头带腰孔设计与无腰孔设计在承重工况下没有显著区别,应力情况均在安全范围,两种设计均可应用。而伸缩式柔性接头带腰孔设计与无腰孔设计在热胀冷缩工况下表现有所不同,无腰孔设计的响应比例远低于带腰孔设计,应力指标中的一次应力无腰孔设计与带腰孔设计虽然均满足铝合金屈服强度要求,但无腰孔设计应力更高,且峰值应力相差较大,无腰孔设计峰值应力远超带腰孔设计,无腰孔设计在疲劳强度上不满足需求,所以热胀冷缩工况必须采用带腰孔设计。
3 应用效果
伸缩式接头设计方案于2021 年9 月左右开始施工,于2021 年10 月左右全线完成优化,完全替代原有的伸缩缝方案。方案实施后机器人因为打滑或者卡死造成其非计划内停机的故障率明显下降。根据准能选煤厂露天带式输送机巡检机器人2021 年2 月—2022 年8 月的应用故障库数据分析:2021 年2 月—2021 年10 月共发生故障27 起,其中因机器人打滑或者卡死造成的故障15 起,打滑或卡死的故障率为56%;2021 年11 月—2022 年8 月共发生故障19 起,其中因为机器人打滑或者卡死造成的故障2 起,打滑或卡死的故障率为11%。故障对比见表3。

表3 故障对比
根据上述数据分析,伸缩式柔性接头方案相比伸缩缝方案,降低了机器人因为轨道接头处问题引起的故障率,伸缩式柔性接头方案针对因热胀冷缩引起的轨道接头伸缩问题具有较好的补偿效果。
4 结语
本文介绍了一种露天带式输送机巡检机器人轨道伸缩式柔性接头的设计方法,该方法在不降低轨道承载能力的前提下有效地解决了因热胀冷缩引起的轨道翘曲变形及缝隙缺口的问题,使原有接头处因轨道伸缩变形而影响机器人正常通过的情况得到了极大的改善,有效地提高了机器人的环境适应性,降低了机器人全年运行故障率。该设计方法通过对伸缩式柔性接头的力学仿真验证其设计的合理性后,小批量生产,并在鄂尔多斯准能选煤厂皮带线进行了实际应用。结果表明,该设计方法具备较强的技术创新点、实用性与可推广性。