基于视觉显著性和图割的图像分割算法优化方案
2024-01-10赵树梅
赵树梅
(烟台理工学院,山东烟台)
近年来,视觉显著性模型在图像分割任务中得到了广泛应用。视觉显著性指的是图像中那些在人类视觉感知中具有显著性的区域,通常与前景目标相关。利用视觉显著性可以帮助分割算法更好地捕捉目标边界并减少背景噪声的干扰。与此同时,图割作为一种经典的图像分割方法,具有良好的分割准确性和可扩展性。将视觉显著性与图割相结合,可以进一步提高图像分割的性能。本文旨在提出一种基于视觉显著性与图割的图像分割算法,以解决传统分割方法在复杂场景下的局限性。
1 视觉显著性模型
1.1 基于低级特征的视觉显著性模型
基于低级特征的视觉显著性模型是一种常用的方法,其基于图像的低级特征(如颜色、纹理和边缘等)来推测图像中的显著性区域。这些低级特征通常能够捕捉到人眼在感知图像时的注意力变化。颜色特征是基于人眼对颜色的敏感性来计算图像显著性的一种方法。通过比较图像中的像素与整体颜色分布之间的差异,可以获得显著性信息[1]。例如,一些算法会将与周围像素具有较大颜色差异的像素标记为显著性区域,因为这些颜色较为突出。
纹理特征是通过分析图像的局部纹理特性来计算显著性的。通常情况下,纹理变化较大的区域更容易引起注意,因此纹理特征在显著性模型中得到了广泛应用。例如,Gabor 滤波器可以捕捉到图像中的纹理信息,通过计算滤波后的响应来判断显著性。边缘特征是指图像中的边缘信息,由于边缘是图像中物体之间的界限,因此在显著性模型中具有重要作用。通过检测图像的边缘并分析其特性,可以得到图像的显著性信息。例如,使用Canny算子可以提取出图像中的边缘,并将其作为显著性区域的候选。
综合利用颜色、纹理和边缘等低级特征,可以构建一个基于低级特征的视觉显著性模型。这些模型通常使用各个特征的加权组合来计算显著性值,并将较高显著性值的区域作为显著性区域。例如,将颜色、纹理和边缘特征进行融合,可以通过计算特征相似性加权和来确定显著性值。举例分析:对于一张自然风景图片,基于低级特征的视觉显著性模型可以从图像中提取颜色、纹理和边缘信息。假设在图像中存在一片明亮的红色花朵,该模型可以检测到花朵的颜色与周围环境的差异较大,纹理比周围区域更多样化,并且花朵边缘清晰,因此给出较高的显著性值,将花朵标记为显著性区域。这样的显著性信息可用于后续的图像分割任务。视觉显著性模型如图1 所示。
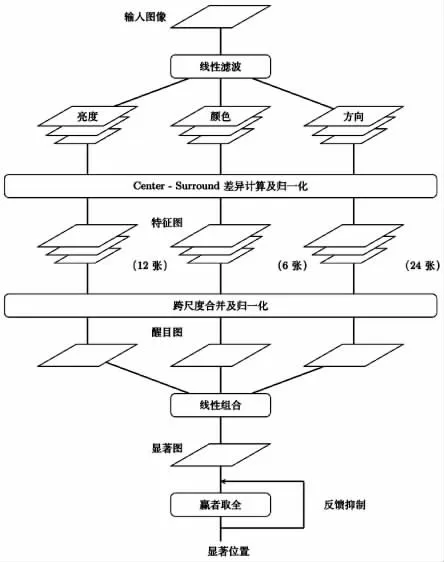
图1 视觉显著性模型
1.2 基于深度学习的模型
随着深度学习的发展,基于深度学习的视觉显著性模型在图像分割任务中取得了重大突破。深度学习模型可以自动从大规模数据集中学习到图像中的高级特征,具有较强的表达能力和泛化能力[2]。基于深度学习的视觉显著性模型通常采用卷积神经网络(CNN)进行特征提取和显著性预测。CNN 可以学习到图像的局部和全局特征,能够捕捉到更高层次的语义信息。一般来说,基于深度学习的视觉显著性模型的设计可以分为两个主要步骤:特征提取和显著性预测。
在特征提取阶段,可以使用预训练的深度网络(如VGG、ResNet 等)作为特征提取器,通过提取网络的中间层特征作为输入。这样的特征通常包含了丰富的语义信息,可以更好地表示图像的显著性。除了传统的RGB图像特征外,还可以使用多模态特征,如深度特征、颜色分布特征等。特征提取过程可以表示为:
[F_{ ext{features}}= ext{CNN}(I)]
其中,(F_ { ext {features}}) 表示提取的特征,( ext{CNN})表示用于特征提取的卷积神经网络,(I)是输入图像。在显著性预测阶段,可以通过添加适当的分类器或回归器来预测图像中的显著性分布。可以在网络末端添加全连接层和激活函数,输出每个像素的显著性概率。显著性预测可以表示为:
[M= ext{Classifier}(F_{ ext{features}})]
其中,(M)表示显著性映射,( ext{Classifier})表示用于显著性预测的分类器。基于深度学习的视觉显著性模型的优势在于其能够利用大规模的标注数据进行端到端的训练,从而学习到具有较强泛化能力的显著性模型。此外,该模型还能够根据特定任务需求进行灵活调整和优化。例如,对于一张汽车驾驶场景的图片,基于深度学习的视觉显著性模型可以通过训练后的深度网络,自动学习到汽车、行人等显著性对象的特征表示。该模型能够将注意力集中在驾驶场景中的主要物体上,例如汽车、行人,而将背景、建筑等非显著性区域置于次要位置。这样的显著性信息可以为目标检测和驾驶辅助系统提供重要的先验知识。基于深度学习算法模型如图2 所示。

图2 基于深度学习图像分割模型算法
2 图像分割
2.1 图割原理
图割算法是一种用于图像分割的方法,其原理基于图论中的最小割/最大流问题。图割的目标是将图像分割成若干个互不重叠的区域,使得相似的像素归为一类。将图像表示为一个图(Graph)的形式,其中图的节点表示图像的像素,边表示像素之间的关系。常见的图表示方式是使用邻接矩阵或邻接表。图割算法通过计算图中的边的权重来评估像素之间的相似性。一般来说,相似的像素之间的边权重较低,不相似的像素之间的边权重较高。图割算法通过最小割或最大流的方式将图像分割成两个部分。最小割是指找到一条割(Cut),使得割中边的权重之和最小。最大流是指在图中找到一个流(Flow),使得从源节点到汇节点的流量最大。最小割等价于最大流问题。通过调整割的位置,图割算法可以将图像分成多个区块,从而实现图像的分割。例如有一幅图像,其中包含一个红色苹果和一个绿色橘子。我们可以将整个图像视为一个图,并用边连接相邻的像素。然后,通过计算边的相似性来找到最小割,从而将图像分割成红色苹果和绿色橘子两个部分。图割算法能够根据像素之间的相似性自动完成这个分割过程。
2.2 图割算法优化应用
为了提高图割算法的效率和精度,人们进行了许多优化工作,源于图割算法的种子点选择。在图割算法中,初始种子点的选择对结果有很大的影响。一种常见的优化是通过手工选取或自动定位种子点,以确保种子点落在正确的目标区域上。图割算法的图构建和边权重计算也是重要的优化方向[3]。通常,可以根据像素的颜色、纹理、梯度等特征来计算像素之间的相似性,并将其作为边的权重。通过设计合适的相似性度量和权重计算方法,可以提高图割算法的准确性和鲁棒性。图割算法中的图割过程也可以进行优化。另一种常见的优化方法是使用迭代优化技术,例如图割迭代法(Graph-cuts Iteration)和α- 扩展算法(α-expansion algorithm)。这些算法通过多次迭代优化割的位置,从而逐步改善分割结果。
针对大规模图像分割问题,可以使用近似算法来加速计算。例如,基于图割的超像素分割算法(Graph-cuts-based superpixel segmentation)将图像分割成多个超像素块,并在这些块上进行图割计算,从而大大减少了计算量。还可以结合其他算法和技术进行图割算法的优化。例如,可以使用机器学习技术来辅助图像分割过程,通过训练分类器来指导割的过程。此外,还可以将图割算法与其他图像处理技术,如边缘检测、区域生长等方法结合起来,从而提高图割算法的效果和稳定性。图割算法通过最小割/最大流原理实现图像分割,通过优化算法的种子点选择、图构建和边权重计算、图割过程等方面,可以提高算法的效率和精度。这些优化方法不仅可以应用于图像分割领域,还可以推广到其他相关领域,如计算机视觉、图像处理等。图割算法优化方法见表1。

表1 图割算法优化方法
3 视觉显著性与图割的图像分割算法
3.1 视觉显著性区域检测
视觉显著性区域检测是一项用于识别图像中突出、吸引人注意力的区域的技术。其目标是模拟人类视觉系统的关注机制,准确地找出图像中的显著性区域。常见的视觉显著性区域检测方法包括基于局部对比度、全局对比度、频域分析以及机器学习方法等。举例来说,基于局部对比度的方法使用图像中每个像素周围的邻域信息来计算像素的显著性分数。通过比较像素与其邻域的颜色、纹理、亮度等特征差异,可以判断像素的显著性。例如,一些像素与其周围相似的像素相比具有更高的对比度,因此被认为是显著性区域的一部分。视觉显著性区域检测如图3。

图3 视觉显著性区域检测
3.2 图割分割的应用
图割分割是一种图像分割方法,它将图像分成不同的区域或对象。图割分割过程基于图像的像素间关系以及预先提供的用户定义的标记信息来确定哪些像素属于同一分割区域[4]。主要步骤包括图构建和最小割求解。在图构建中,将图像中的像素视为图中的节点,并连接彼此相邻的像素。这创建了一个具有像素连接关系的图。然后,为图中的边分配权重,权重反映了相邻像素之间的相似性。这些权重可以基于像素之间的颜色、纹理、空间距离等特征计算得出。在最小割求解中,通过定义一些节点作为种子节点,并给它们分配预先定义的标记(属于前景或背景),通过最小化割来确定哪些像素被分配给前景或背景。最小割求解可以通过图论算法,如Ford-Fulkerson 算法或最大流最小割算法来实现。这样就可以根据用户定义的标记信息进行有效的图像分割。图割分割的具体步骤见表2。
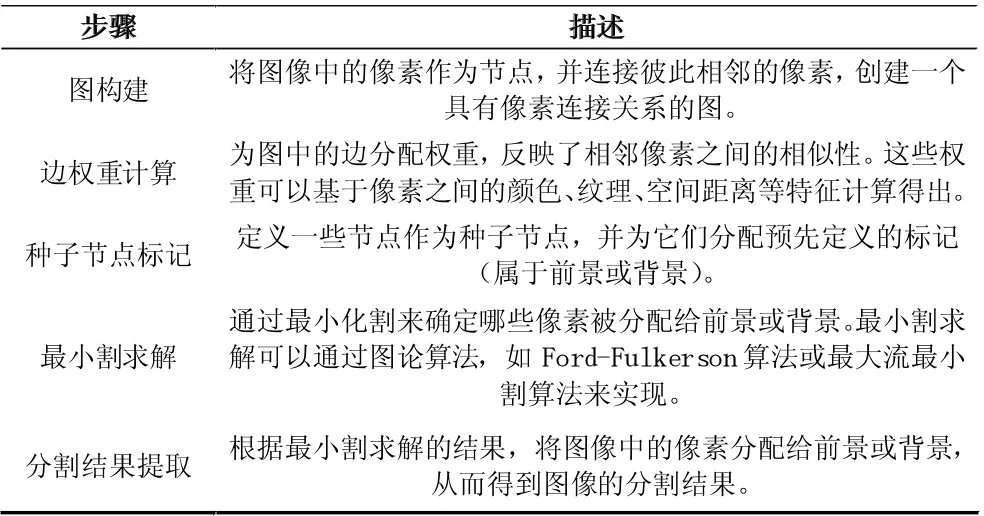
表2 图割分割的具体步骤
3.3 分割结果后处理技术
分割结果后处理技术旨在进一步提高分割结果的质量,并消除可能存在的噪声或错误分割。常见的后处理技术包括边缘平滑、连通性分析和形态学运算等。边缘平滑是一种常用的后处理方法,可以通过对分割结果中的边缘进行平滑处理来消除边缘中的噪声或不连续性。一种常见的方法是使用滤波器或平滑算子对边缘进行模糊处理,以减少边缘的锐度和噪声。
连通性分析可以通过将相邻的像素或区域连接在一起来修复分割中的不连续性。这可以通过像素或区域的连接性和空间邻近性来实现。例如,可以将相邻的像素合并成一个区域,或者将不相邻但具有相似特征的区域合并在一起。形态学运算是一种基于像素值的形态学操作,用于消除分割结果中的噪声或填补分割中的空洞。常见的形态学运算包括膨胀和腐蚀[5]。膨胀可以扩张分割结果的区域,填充空洞,而腐蚀可以收缩区域,去除噪声或细小的分割错误。这些分割结果的后处理技术可以帮助提高分割结果的准确性和一致性,使得分割结果更符合实际场景。
结束语
本文提出了一种基于视觉显著性与图割的图像分割算法,并通过实验证明了该算法的有效性和准确性。该算法在捕捉目标边界和减少背景噪声方面取得了显著的改进。然而,仍存在一些挑战,例如算法在复杂场景下的鲁棒性和计算效率等方面的改进。未来的研究可以进一步探索如何结合更多的上下文信息和深度学习技术来提升图像分割算法的性能。总之,本文所提出的基于视觉显著性与图割的图像分割算法在实际图像处理任务中具有潜在的应用价值,并为进一步研究图像分割问题提供了有益的启示和参考。
