基于智能手机GNSS伪距定位的运动距离和速度确定
2024-01-10葛在宸王明华
葛在宸,王明华
(南京信息工程大学遥感与测绘工程学院,210044,南京)
0 引言
当前的智能手机中均内置了GNSS芯片,可按一定的时间间隔进行定位,从而实现各项基于位置的服务。随着全民健身热潮的兴起,对运动距离和速度量测需求增大,各类运动手表[1-2]和手机APP相继涌现,可记录跑步距离和速度。然而,这些设备或APP出于商业目的,算法并不公开。另外,在使用过程中,也经常发现设备记录不准确的情况。因此,研究基于手机GNSS的运动距离和速度准确获取仍具有重要意义。
基于手机GNSS的距离和速度计算,其关键在于实现准确的GNSS定位。2016年谷歌提供安卓手机原始 GNSS 观测数据的获取接口后,基于智能手机定位的研究迅速增长。 Paziewski等[3]评估了华为P20手机观测值质量,并使用相对定位的方法改善了定位精度。Sharma等[4]研究了三星 S8智能手机GNSS数据的质量、标准单点定位、多普勒平滑单点定位和RTK定位精度。Zhang等[5]开展了基于卡尔曼滤波的伪距单点定位,并分别在动、静态环境测试定位精度。史翔[6]提出了一种基于手机原始GNSS观测值连续平滑定位算法,显著提升了手机定位精度。汪亮等[7]开发了基于安卓系统的实时精密单点定位软件PPPAnd。陈波等[8]研究了手机原始GNSS观测数据的质量,研究表明手机观测值内具有大量失锁现象。Massarweh等[9]深入研究了小米8双频手机在GNSS定位中多路径误差对其定位精度的影响。Fu等[10]介绍了智能手机GNSS原始观测值的获取方法,及分析了安卓手机在高速路上采集的GNSS数据的定位精度。郭斐等[11]针对双频智能手机开发了一款基于安卓手机的实时PPP程序,结果表明实时与事后PPP平面定位精度相当,而在高程方向,事后PPP精度更高。高成发等[12]使用了星间单差法对GNSS原始观测值进行改进,从而达到提高智能手机实时动态定位精度的效果。王颖喆等[13]研究了一种实时的动态差分切换滤波定位算法,有效地降低了伪距噪声,提高定位精度。王楚极等[14]基于华为P40智能手机开展了静、动态环境下的多频多系统RTK定位性能分析,结果表明其精度要优于芯片自带软件的定位解。
以上大部分研究是对手机GNSS观测值滤波或平滑,再进行定位解算,从而实现高精度定位。本文则尝试直接对未平滑的手机GNSS观测值进行伪距单点定位,拟通过对定位后的坐标进行位置差分改正或对坐标序列进行移动平均滤波,将修正或平滑后的坐标用于运动距离和速度的计算,并评定精度。
1 方法原理
通过GNSS伪距观测确定准确的运动距离和速度,其关键在于获取各时刻载体的准确位置信息。手机运动过程中进行伪距单点定位,其精度为几米至几十米,若直接用于计算运动距离和速度,无法满足日常使用需求。若将手机视为流动站,在附近的基站上计算出位置改正数,发给流动站(手机)进行坐标改正,则可能提高距离、速度的计算精度。若周边没有基准站,对手机伪距单点定位的坐标序列进行移动平均处理,可降低坐标序列噪声水平,则也可能提高后续距离和速度的计算精度。
1.1 位置差分方法
GNSS伪距观测的一般方程可简写为:
ρ=ρ0+c(tR-tS)+I+T+ε
(1)

(2)
用以上改正数对流动站单点定位结果进行改正,得改正后坐标为:
(3)
(4)
1.2 位置移动平均方法
位置移动平均法的基本思想是将某一时刻坐标和该时刻之前若干时刻坐标的平均值代替该时刻的坐标值,具体为:
(5)

1.3 距离和速度计算
(6)
平均速度V的计算如下:
(7)
式中,t为运动的总时长。
2 实验与结果分析
2.1 实验介绍
以某高校的田径场为实验场地,沿着某一跑道快速步行10圈,过程中,手机开启Geo++ Rinex Logger APP(http://www.appchina.com/app/de.geopp.rinexlogger)进行GNSS原始数据采集,同时携带多款智能手表进行位置记录,以及使用手推式滚轮测距仪进行量距及计算平均运动速度(图1(a))。在后续的实验分析中,以手推式滚轮测距仪获取的数据作为真值或参考值,评价通过手机GNSS获取的距离和速度值的精度。
在实验中,分别以静止放置的手机(图1(b))和某教学楼顶连续运行参考站(图1(c))为基站,基准站与流动站直线距离小于1 km,比较采用导航型和大地测量型GNSS接收机做基站对运动中手机进行位置差分的效果。本文总共进行了3次实验,各次实验信息如表1所示。

表1 各次实验信息
数据处理时,采用自编程序进行伪距单点定位,观测值取GPS C1观测值,截止高度角取5°,电离层延迟用Klobuchar模型进行改正,对流层延迟用Saastamoinen模型进行改正,模型所需的气象参数取经验值。
2.2 位置差分结果分析
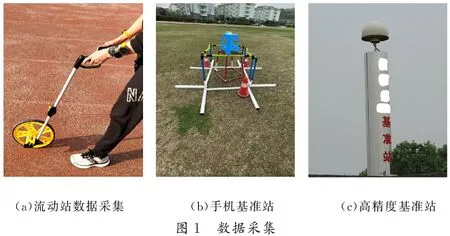
对3次实验中手机观测的GNSS数据(GPS C1)进行伪距单点定位,以教学楼顶的连续运行参考站为基准站,计算各时刻的位置改正数,将改正数发给流动站(手机),对运动手机端单点定位坐标进行改正。为区别起见,下文将直接单点定位的坐标称为单点定位坐标,将差分改正后的坐标称为位置差分坐标。图中2(a)和图2(c)中红色点分别为单点定位后的平面和高程坐标,图2(b)和图2(c)中蓝色点分别为位置差分后的平面和高程坐标。平面坐标是将经纬度坐标进行高斯投影,并对北坐标和东坐标扣除一定的常数得到的(图3、图4、图5、图6做法相同)。由于3次实验的结果类似,图2中只显示了第1次实验的数据。实验中,手机是沿着某一特定跑道运动的,并且操场较为平坦,即高程变化应该较小。从图2(a)和图2(c)可以看出,单点定位坐标离散度较大,平面位置存在20~30 m波动,高程位置存在30~50 m波动,因此,直接使用单点定位坐标进行运动距离和速度计算将产生较大的误差。图2(b)和图2(c)中显示,经过位置差分后,坐标离散度略有减小,但是改善并不明显。使用位置差分后的坐标计算运动距离和速度同样会差生较大的误差。
当流动站采用高精度GNSS接收机(大地测量型接收机)时,位置差分能显著提升流动站定位精度,而本文中流动站为智能手机,位置差分后改进效果并不明显。位置差分只能消除流动站与基准站公共误差(如大气延迟误差),而无法消除非公共误差(如多路径误差和观测噪声等),本文采用位置差分无法显著改进坐标精度,说明智能手机伪距单点定位(在对流层和电离层模型改正后)误差的主要部分是非公共误差,这主要是手机的GNSS接收机为一般的导航型接收机(观测噪声大)以及观测环境复杂(多路径效应强)造成的。
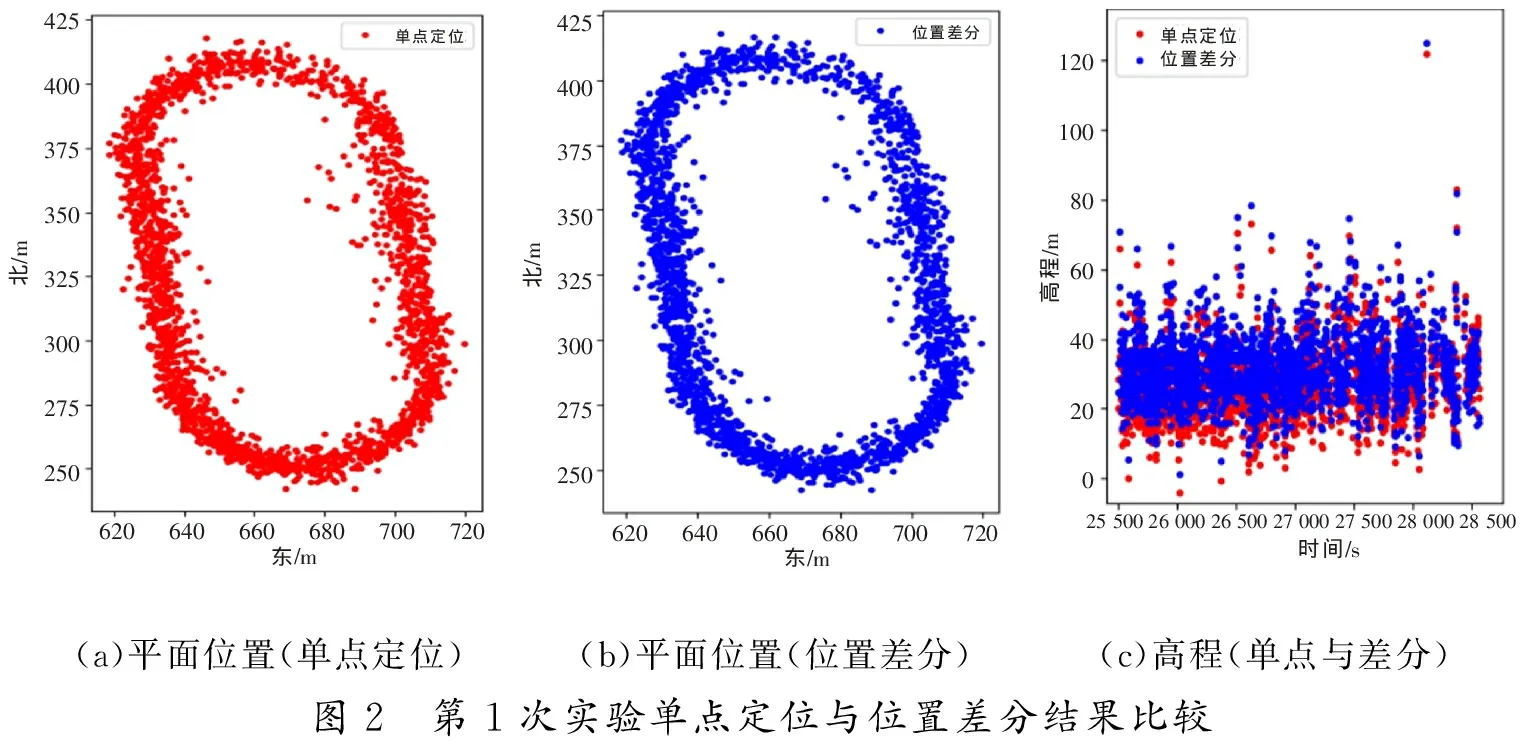
根据以上分析,若以手机作为基准站,进行位置差分改正时,改正数中的非公共误差部分会使改正结果“恶化”,而以连续运行参考站为基站时,由于参考站的接收机为大地测量型接收机,质量比导航型接收机好,且观测环境也较好,观测噪声和多路径误差等非公共误差相对较小,差分改正时,非公共误差对结果的影响较小。图3中对比了以手机和以参考站为基站的差分改正坐标,前者(粉色)的离散度大于后者(蓝色),这验证了前面的分析。
2.3 移动平均结果分析
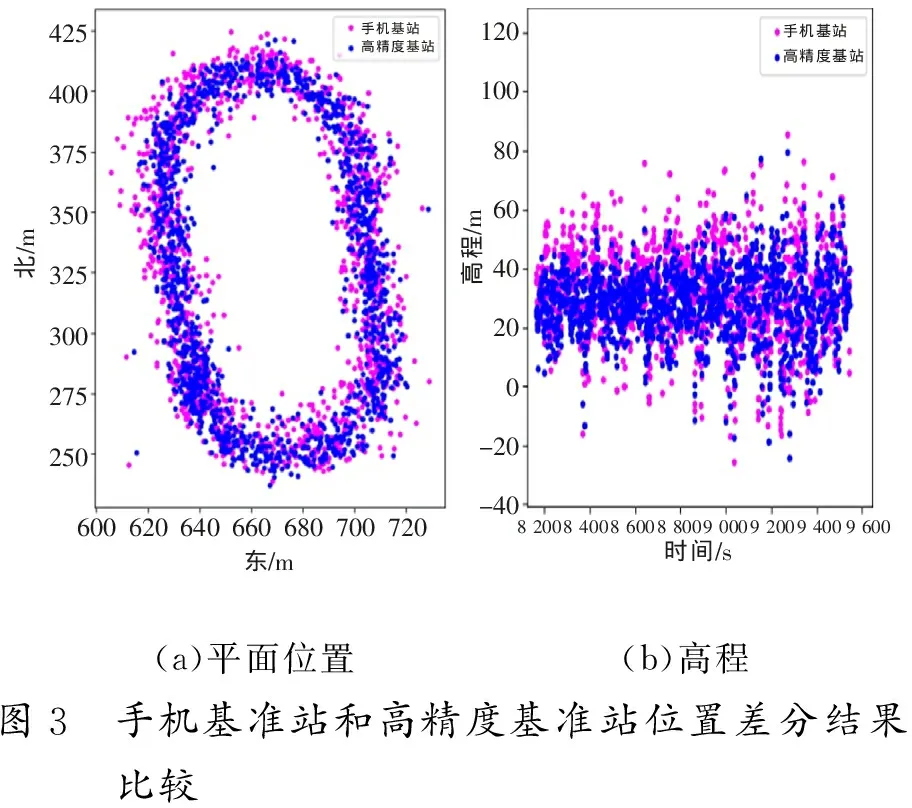
对单点定位坐标进行移动平均处理,得到滤波(或平滑)后的坐标值,本文坐标移动平均点数取20。图4~图6分别为各次实验的结果,(a)为单点定位坐标,(b)移动平均后的坐标,(c)为Garmin运动手表记录的坐标,Garmin运动手表为商业化手表,其算法保密。从图4~图6中可以看出,移动平均后坐标离散度减小,更接近跑道形状,说明移动平均方法能显著降低单点定位坐标的噪声,且移动平均后的坐标点与商业手表记录的坐标点形状已较为接近。图7中显示的是单点定位、移动平均和Garmin手表的高程数据,同样,移动平均后的高程序列比单点定位的高程序列更加平滑,与实际更接近,而商业化运动手表记录的高程值最为平滑。
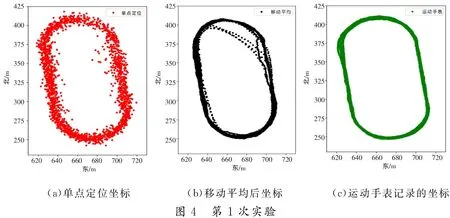

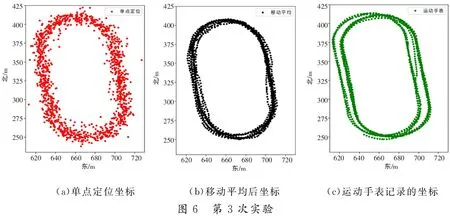

图7 第1次实验单点定位、移动平均和运动手表记录的高程值
以单点定位、移动平均和Garmin运动手表的坐标序列分别计算运动距离和速度,并与手推式滚轮测距仪记录的距离和推算的速度进行比较。从表2中可以看出,直接使用单点定位坐标进行距离和速度计算,误差非常大,是参考值的好几倍,以差分改正后的坐标进行计算,误差与单点定位结果相当(差分改正结果的距离和速度计算值未显示)。以移动平均后的坐标计算距离和速度,距离误差不超过15 m(<0.35%),速度误差不超过0.7 m/min(< 0.35%)。依据移动平均后坐标计算的距离和速度的精度与Garmin手表的计算值精度相当。

表2 多种数据距离和速度比较
3 结论
准确运动距离和速度的获取,能为各类训练及跑步健身等提供基础数据,为进一步改进训练方案提供信息支撑,有着广泛的应用需求。本文通过智能手机的GNSS观测值进行伪距单点定位,并对单点定位结果进行修正,从而有效提高了运动距离和速度计算值的精度,并获得以下结论。
1)利用附近基准站计算位置改正数,并对运动手机(流动站)进行位置差分改正,无论基准站选用高精度大地测量型接收机还是导航型接收机(手机),位置差分后精度改进效果均不明显。当基准站选用手机作为接收机,运动手机(流动站)经差分改正后,精度甚至有一定的恶化,这主要是因为,手机端伪距单点定位(经过对流层和电离层模型改正)的主要误差为观测噪声和多路径等误差,这些误差在基准站和流动站上并不相同,以基准站处计算的位置改正数无法消除流动站处这些非公共误差。
2)对单点定位结果进行移动平均,能有效降低坐标序列噪声,坐标点的分布与实际情况更为接近,由移动平均后坐标计算的距离和速度与参考值较为接近,距离和速度计算值的相对误差均不超过0.35%,这一精度与商业化运动手表的计算值精度相当,能满足一般的日常应用。
3)需要指出的是,移动平均法虽然简单易用,效果较好,但具体取多少个数据点进行移动平均需要根据经验判断,不同的应用场合和不同的坐标序列噪声水平时,所取得点数可能不同,需人为根据具体情况确定,自适应差。后续将研究自适应的方法,进行坐标值滤波去噪,提高距离和速度计算精度。