基于卡口及个体车辆轨迹数据的停车需求分析方法
2024-01-09沙志仁

摘要 停车需求的获取,是城市道路交通管理工作中的重点之一。文章提出了基于卡口及个体车辆轨迹数据的停车需求分析方法。首先输入设定区域范围和时间范围内的卡口数据,根据卡口数据获取车辆身份信息并计算个体车辆轨迹,获取车辆单次出行的起点卡口和终点卡口;然后根据车辆单次出行起点卡口的数据推算车辆的来源地,根据车辆单次出行终点卡口的数据推算车辆的目的地;进而根据推算得到车辆的来源地和目的地进行统计和分析,得到总体的区域停车需求结果。利用现有的交通卡口数据,能更加全面地反映研究区域内的停车需求,进一步为停车场的规划建设提供指导。
关键词 智能交通;城市道路;交通管理;停车需求;卡口数据;车牌检测
中图分类号 U491.71文献标识码 A文章编号 2096-8949(2023)23-0012-04
0 引言
随着城市的发展和经济的崛起,城市中的车辆日益增多。据统计,截至2023年6月底,全国共有各类机动车保有量为4.26亿辆,并且每年还在快速增长。随着停车问题日益严峻,尤其是在车流密集的大城市中,如何建设停车场来满足日益增长的需求,成为一个重要的课题[1]。而且,每座城市的老城区交通基础设施薄弱、交通需求集聚,是城市停车问题最典型的区域。居民停车特征多样,亦为研究带来难题,例如居民拥车不用车、乱停车影响社区出行品质、重点区域停车矛盾突出等[2]。为此,有学者提出用卡口数据、浮动车GPS定位数据、停车场运营数据等多种直接或间接的停车数据来分析停车需求,以此来指导停车场的建设规划[3-4]。但是目前在传统的卡口数据中,往往只对交通流量和车速较为关注,对车辆的来源、最后停放地等信息的采集与分析有所忽略,且卡口检测的漏检情况亦屡见不鲜,故并不能直接利用这些卡口数据来得出停车需求。浮动车GPS数据通常只为交通运输管理部门及城建、城管部门管理所用,第三方导航企业的GPS数据基本不对外共享,使得GPS检测的样本量较小、渗透率较低,同时由于GPS数据获取手段和数据格式的不同,其在实际操作中存在数据格式转换、数据导入输出难度大的问题。停车场数据多源于路外停车场出入口的收费设施,这些收费设施多为企业自主投资建设,在数据共享层面存在一定程度上的壁垒,而部分路内停车位仍停留在人工收费,或者路边免费停车,这些情况也较难获得停车数据,所以难以全面反映车辆的停车需求情况。为此,该文提出一种基于卡口及个体车辆轨迹数据的停车需求分析方法,无须收集各个停车场的基础数据及运营数据,也不需要获取浮动车GPS、视频监控、交通流检测等其他类型数据,仅需要卡口数据及由卡口数据推算得到的个体车辆轨迹,便可获得指定区域内的停车需求。
1 基于卡口数据的个体车辆轨迹计算
高清卡口系统可自动获取车辆的通过时间、地点、行驶方向、号牌号码、号牌颜色、车身颜色等数据,但目前仍有一定的误差,最典型的误差就是卡口漏检,需要进行卡口数据校验及个体车辆轨迹修补[5]。造成卡口对车辆漏检的原因有很多,包括但不限于:
(1)卡口拍摄本身需要一定的时间,若同时间经过的车辆数量太多,由于摄像头延时等因素,会出现遗漏拍摄的情况。
(2)同一方向车道上,大型车辆在转弯、变道、掉头等时刻往往会遮挡其他小车的车牌信息。
(3)卡口拍摄位置、角度问题,如出现逆光、侧光拍摄或受建筑物遮挡的时候,会导致图像清晰度受影响而无法识别的情况。
(4)恶劣天气,如大雾、暴雨雪、台风或夜晚光线不足情况下,卡口拍摄受外界影响而会出现漏检的情况。
(5)卡口设备出现故障而造成漏检。因此,需要通过轨迹计算,得到较为准确的个体车辆轨迹数据支撑停车需求计算。
主要步骤包括:根据已有的卡口检测数据和漏检卡口的特征推算漏检卡口的可能出行路径;根据漏检卡口可能出行路径和历史卡口数据库,采用贝叶斯概率模型回溯推算出对应于漏检卡口的所有可能出行路径的漏检概率;根据回溯推算出的漏检概率,结合历史卡口数据库的数据对漏检卡口进行数据检验和补全,从而获得个体车辆轨迹。
1.1 可行路径计算
在确定的研究范围和时间段内,根据历史卡口数据库中所有相同车牌车辆经过两个相邻卡口的时间差,得到完整的单次出行链数据。根据历史卡口数据库的卡口过车时间记录,计算历史卡口数据库中所有相同车牌的车辆经过两相邻卡口的时间差,判断计算出时间差是否大于设定的时间阈值。若是,则判定两相邻卡口为非单次出行卡口,反之,则判定两相邻卡口為单次出行卡口。将同一车牌的车辆中所有属于单次出行卡口的数据整合成完整的单次出行链数据,其中完整的单次出行链数据中第一个数据所对应的卡口为同一车牌车辆的起始卡口,最后一个数据所对应的卡口为同一车牌车辆的终点卡口。
根据已有的历史卡口检测数据和漏检卡口的特征推算漏检卡口的可能出行路径。这里说的“漏检卡口”是相对于给定的起点卡口和终点卡口来说的,具体是指在起点卡口和终点卡口之间满足如下任一情形的卡口:缺失记录的、有检测记录但无法识别的、有检测记录但有明显误差或错误的。另外,历史卡口数据库中所有卡口检测地点均为已知,但有部分卡口的检测数据(如车辆经过该卡口的时刻,即卡口的过车时间记录)因漏检而未知。结合已有卡口检测数据所确定的完整出行链与漏检卡口的特征,进行漏检数据的界定,推算可能的出行路径,在筛选出单次出行链中的漏检卡口后,即可推算出漏检卡口的可能出行路径。
1.2 漏检概率计算
根据漏检卡口的可能出行路径和历史卡口数据库,采用贝叶斯概率模型回溯推算出对应于漏检卡口所有可能出行路径的漏检概率,具体步骤如下:在历史卡口数据库中选择回溯推算当次出行的起始节点和终点节点,并计算起始节点与终点节点间每条可能出行路径的概率P(βi),其中,βi为起始节点与终点节点间的第i条可能出行路径,i为正整数。进而分析可能出行路径βi中在历史卡口数据库内已有检测数据的卡口所占的比例P(α|βi)。根据可能出行路径βi和比例P(α|βi)采用贝叶斯概率模型计算对应于漏检卡口的所有可能出行路径的漏检概率P(βi|α)。
式中,k——贝叶斯概率模型的累计参数。
1.3 出行轨迹补全
根据回溯推算出的漏检概率,结合历史卡口数据库的数据对漏检卡口进行数据检验和补全,具体步骤如下:回溯推算的起始节点和终点节点根据漏检卡口进行选取,其需要满足的条件是起始节点到终点节点间的路径至少有2条,且至少有1条路径包含漏检卡口。回溯推算的起始节点和终点节点可在不满足设定的校验条件时重新进行选择和调整。然后求出所有可能出行路径的漏检概率P(βi|α)中的最大概率max[P(βi|α)]以及最大概率max[P(βi|α)]对应的可能出行路径。然后以最大概率max[P(βi|α)]对应的可能出行路径作为当前回溯路径,根据判断的结果执行相应操作:若当前回溯路径满足设定的校验条件,则执行下一步骤;反之,则以次最大概率对应的可能出行路径作为当前回溯路径,重新判断当前回溯路径是否满足设定的校验条件。
最后根据历史卡口数据库中已有的过车时间记录、当前回溯路径起始节点和终点节点间车辆的平均行驶时间以及已有检测数据卡口的过车时间记录,对漏检卡口的过车时间记录进行补全,得到漏检卡口补全后的过车时间记录。最终,结合历史卡口数据库中已有的卡口检测数据对漏检卡口的数据进行自校验和补全。
2 基于个体车辆轨迹的停车需求估算
通过选定指定区域范围和时间范围内的卡口数据及个体车辆轨迹计算结果数据,获取车辆单次出行的起点位置和终点位置。然后根据车辆单次出行的起点卡口与终点卡口的检测数据,推算车辆所属的来源地与目的地。再把各辆个体车辆的来源地和目的地进行聚类统计,从而实现停车需求的估算。
2.1 来源地与目的地推算
根据输入的卡口数据及个体车辆轨迹数据,计算车辆单次出行的平均车速。针对来源地的推算,根据车辆单次出行的起点卡口的数据,得到车辆经过起点卡口的时刻、所在的车道和行驶方向,并结合车辆该次出行的平均车速,考虑上一次出行的目的地及到达时刻,关联所在路段的停车场信息,推算车辆的来源地及出发时刻,必要时修正上一次出行的目的地及到达时刻。
针对目的地的推算,根据车辆单次出行的终点卡口的数据,得到车辆经过终点卡口的时刻、所在的车道和行驶方向(左、直、右、掉头等),得到该次出行末次卡口检测的下一行驶路段,关联下一行驶路段的停车场信息,并结合车辆该次出行的平均车速,推算车辆目的地及到达时刻。
2.2 指定区域的停车需求分析
根据推算得到的车辆单次出行的来源地和目的地,以及出发时刻和到达时刻,推算每一个路段不同时刻的车辆出发量与到达量,从而得到一个区域路网中虚拟停车场不同时刻的车辆出发量与到达量。进而对区域路网中虚拟停车场不同时刻的车辆出发量与到达量进行统计和分析,得到该区域路网的停车需求估算,包括停车需求分布图、停车时间特征分布图和停车供给不足的位置分布图等。
其中,所述虚拟停车场是假定在路段的某侧分布的一个区域,虚拟停车场可包括独立占地的停车场,也可能是路边停车场,也可以是空中立体停车场,也可以指代一片区域,总之是区域内可以用于停车的空间。所划分虚拟停车场的边界及大小,根据路网结构及卡口检测密度分布而定,代表着车辆驻停的可能区域。利用虚拟停车场的概念,通过分析车辆可能停车的位置,将现实的多种停车情况归纳为统一的情况,降低了分析的难度,使得使用卡口数据分析停车需求可以简单实现。
3 算例
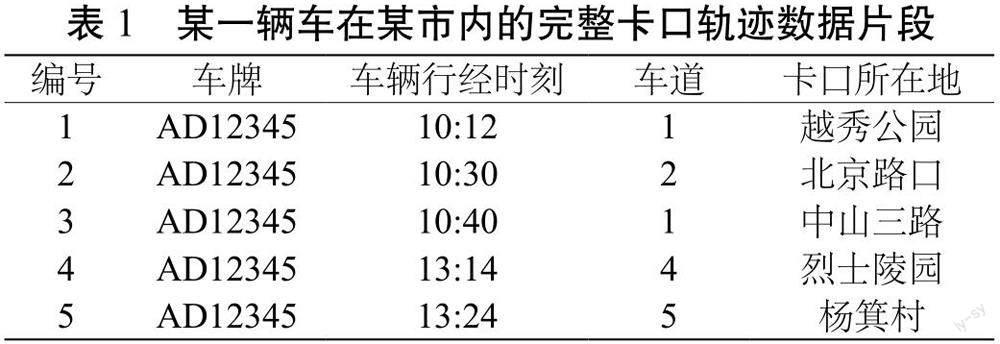
车牌為AD12345的某一辆车在某市内的完整卡口轨迹数据片段如表1所示。该车在这天某个时段内一共有5个卡口数据记录,其中编号为1、2和3的三条卡口数据,相邻两个卡口所记录车辆经过的时刻的时间差分别为18 min和10 min,编号为4和5的两条卡口数据,所记录的时间差为10 min,编号为3和4的两条卡口数据,所记录的时间差为2 h 34 min。明显地,从中山三路到烈士陵园的几百米路程并不需要2 h 34 min,因此编号3和4的两条卡口数据并非单次出行的数据,可以推断在车辆经过编号3的卡口后进行了停车,在第二次单次出行时才经过编号4的卡口,系统需要预先设定一个阈值作为判断两条卡口数据是否为同一次出行的判断依据。此阈值的选取,可以根据不同城市不同道路交通运作特征而定。
以系统设定阈值为1.5 h为例,此时,系统会将编号为1、2和3的三条卡口数据判定为车牌AD12345的一次单次出行记录,并将这三条数据整合成一条出行数据链,其中编号1的卡口(所在地越秀公园)会被确认为这一次单次出行的起点卡口,而其中编号3的卡口(所在地中山三路)会被确认为这一次单次出行的终点卡口。表1中,车辆AD12345从起点卡口越秀公园到终点卡口中山三路,可以根据起点卡口和终点卡口的时间差,以及该两个卡口的距离,算出车辆的平均车速。而编号3和4的两条卡口数据,因为车辆经过的时间差超过设定阈值,会判断为非单次出行。同理,编号4和编号5的两条卡口数据会判定为单次出行,起点为烈士陵园,终点为杨箕村。
另外,设定阈值可以根据实际情况灵活调整,可以根据地理上两个卡口的实际路网距离,对两个卡口之间的经过时间设定阈值。例如,从越秀公园到北京路口的路程约为3 km,正常通行时间为5 min,考虑堵车问题,可以将这两个卡口的阈值设定为20 min。
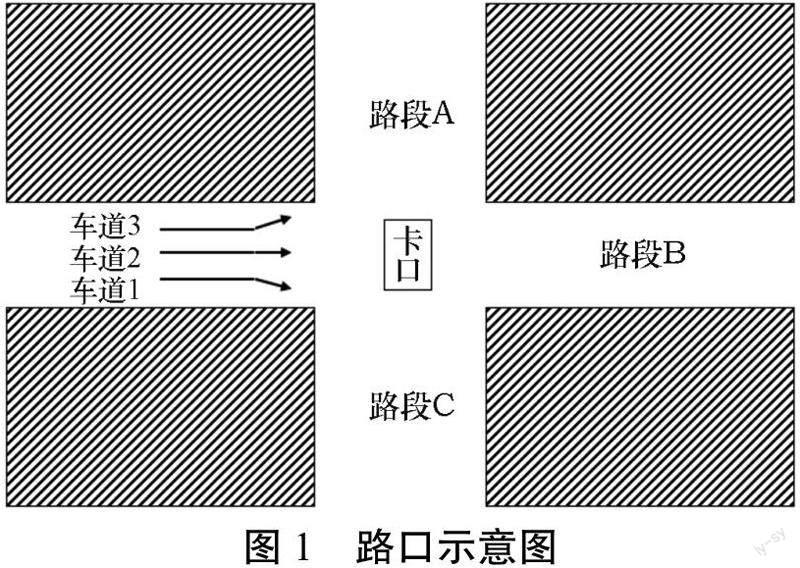
根据基于车辆身份检测数据的城市道路使用特征[6],一般车辆行驶在最右侧的车道(如图1所示中的车道1),车辆的走向很可能是右转进入路段C,并且在路段C的一侧停车;而车辆位于左侧车道(如图1中的车道3),该车辆很可能左转进入路段A,并且在路段A的一侧停车;而在中间车道2的车辆通常是直行进入路段B,并且在路段B的一侧停车。所以可以根据车辆经过起点卡口时所在的车道和车辆的行驶方向判断车辆的来源,根据编号1的卡口数据(起点卡口数据),车辆在车道1,结合车道1的行驶方向,可以推算车辆来源于车道1行驶方向右侧的停车场,或者来自车道1前一个右转路口的停车场,即得到车辆单次出行的来源地;同理,根据编号3的卡口数据(终点卡口数据),可知车辆经过终点卡口时也是处于车道1,结合车道1的行驶方向,可以推断出车辆的目的地是道路前方右侧的停车场,或者为路口右转后的停车场。可以通过车辆单次出行的平均车速来调整车辆的来源地和目的地的区域范围。
将数据中所有车辆单次出行的来源地和目的地进行分类,将属于同一区域的停车目的地或者来源地归为同一个虚拟停车场,记录每个虚拟停车场不同时刻的车辆出发量与到达量。对虚拟停车场不同时刻的车辆出发量与到达量进行统计和分析,包括停车需求分布、停车时间特征分布和停车供给不足的位置分布。停车需求分布体现研究区域内不同地点停车需求分布;停车时间分布体现研究区域内不同时段同一地点的停车地点的停车需求;停车供给不足分布体现研究区域内停车需求大于现有停车位地点分布情况。
4 小结与展望
该文所提出的基于卡口及个体车辆轨迹数据的停车需求分析方法,无须收集各个停车场的基础数据及运营数据,也不需要获取浮动车GPS、视频监控、交通流检测等其他类型数据,仅利用现有的交通卡口检测到的车辆所处车道信息,推断车辆的停车位置,获知车辆的来源地和前往的目的地分布,即可分析停车需求,实现简单、成本低。同时,利用了虚拟停车场的概念,通过分析车辆可能停车的位置,将现实的多种停车情况归纳为统一的情况,降低了分析难度,使得使用卡口数据分析停车需求可以简单实现。并可指导实体停车场建设,并为后续通过停车诱导等方式合理解决停车难问题、解决相关路网的交通拥堵,制定相关措施提供了有效、可靠的计算方法。
基于该文提出的停车需求估算方法,还可以进一步继续进行更深入地研究与分析,获取更多不同方面的交通数据,包括但不限于:一是可以获知交通停车需求较大的路段,通过卡口、GPS等其他数据分析周边是否有车辆绕行、慢行来寻找空余停车场或路边车位的情况,在相关路段完善交通标志标线指引及停车诱导等信息化设施,科学引导车辆选择合适的地点合理停放;二是可以获知交通区域路网中的停车需求,在重要路口、路段中经常有车辆出入的地点,可考虑增派必要的警力到现场指挥,解决停车场入口车辆等待进场排队长度过长的问题;三是可以获知车辆单次出行的完整信息,其停车信息等可供交通、公安交警部门进行车辆搜捕、缉查布控提供定位信息情报、车辆轨迹信息情报等;四是可以獲知常用的停车信息,可开发相应移动互联App产品,为车主提供实时动态的停车位置信息指引,科学引导车辆停放。
参考文献
[1]王波. 面向实施的公共停车场用地规划方法研究——以广州为例[J]. 城市规划, 2020(8): 107-111.
[2]杜刚诚, 杨锐烁, 张海霞. 广州市老城区停车困境及治理策略[J]. 城市交通, 2023(4): 9-16.
[3]马荣叶, 刘晓华, 刘四奎, 等. 一种基于OD矩阵的停车需求预测方法: CN105489056A[P]. 2016-4-13.
[4]刘曼, 黄经南, 王国恩. 基于需求导向的城市公共停车场规划方法探讨[J]. 规划师, 2017(10): 101-106.
[5]余志, 廖琼华, 何兆成. 基于车辆身份感知数据的路段轨迹重构方法研究[J]. 交通运输系统工程与信息, 2019(4): 87-93.
[6]邹兵, 余志, 何兆成, 等. 基于车辆身份检测数据的城市道路使用特征[J]. 中山大学学报(自然科学版)(中英文), 2022(3): 132-139.
收稿日期:2023-10-16
作者简介:沙志仁(1984—),男,工学博士,工程师,研究方向:智能交通系统。
基金项目:广州市南沙区重点领域科技项目“基于元场景生成的云车协控增强技术与开放实验平台”(2022ZD014)。