基于LabVIEW的农业采摘机器人虚拟运动仿真研究
2024-01-09张倩,李杨
张 倩,李 杨
(1.石家庄工程职业学院,石家庄 050000;2. 石家庄科技信息职业学院,石家庄 050024)
0 引言
随着先进种植技术的不断发展,设施农业生产过程的各个环节对劳动力的需求也不断增长,而水果蔬菜的收获过程仍依靠大量的手工作业完成,造成果蔬收获成本无法有效降低[1-2]。随着城市化进程的加快,农村劳动力缺口越来越大。因此,研究开发一种水果蔬菜收获采摘型农业机器人,能够有效促进先进种植的发展,并从中解放出大量的劳动力。采摘机器人具有较高的精确度,且效率高,可以保证果蔬采摘过程顺利进行,能有效降低农业种植生产成本[3-5]。果蔬采摘机器人作业速度和作业精度直接影响使用过程中的成本,采摘机器人生产成本直接决定了采摘机器人的推广使用过程。因此,对农业采摘机器人进行虚拟运动仿真,能在设计阶段对采摘机器人的作业速度和运动轨迹进行验证,从而有效降低生产成本,提高农业采摘机器人使用过程中的生产效率[6-7]。
笔者通过对六自由度农业采摘机器人的正运动学和逆运动学过程进行分析,结合SolidWorks中的Motion模块对采摘机器人的运动轨迹进行规划,并采用LabVIEW对农业采摘机器人的运动学过程进行虚拟仿真。
1 采摘机器人总体结构
所设计的采摘机器人是一种六自由度农业采摘机器人,主要包含机器人移动本体、腰部回转机构、大臂、小臂、腕部及采摘执行器[8],如图1所示。
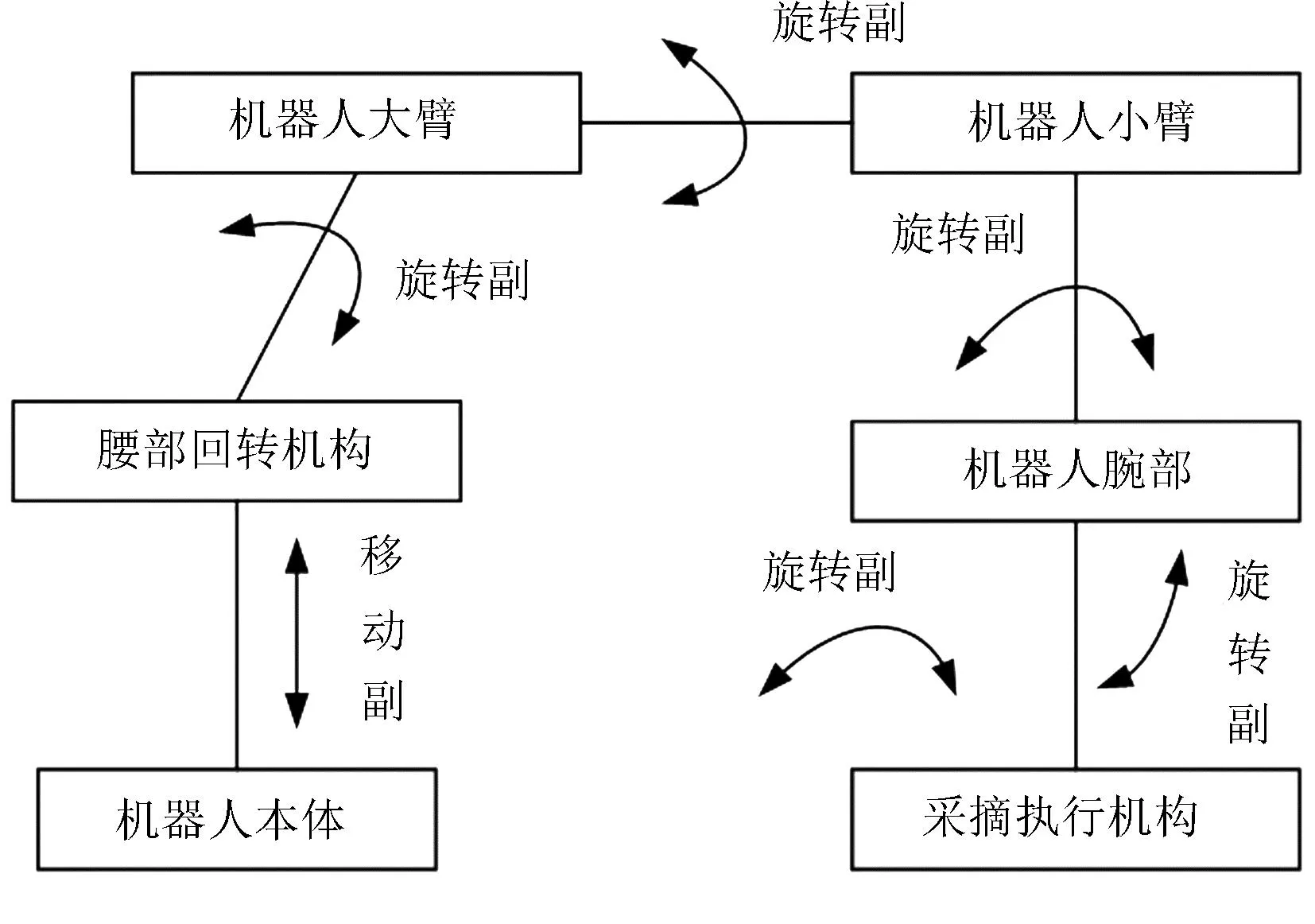
图1 农业采摘机器人结构示意图Fig.1 Structure diagram of agricultural picking robot
采摘机器人臂部包含1个移动副和3个旋转副,机器人腕部包含俯仰和回转2个自由度,形成采摘机器人的六自由度运动副,且每一个运动副位置均安装有零位开关和正负两个方向的限位开关[9]。采摘机器人肩关节和肘关节位置采用谐波减速器,各转动轴在旋转过程中采用编码器进行电机位置反馈,形成采摘机器人作业过程中的闭环控制[10]。表1所示为农业采摘机器人D-H参数表。
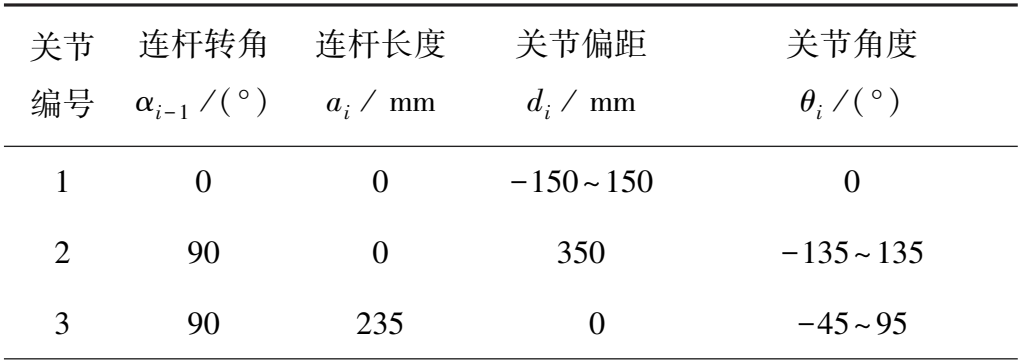
表1 农业采摘机器人D-H参数表Table 1 D-H parameter table of agricultural picking robot
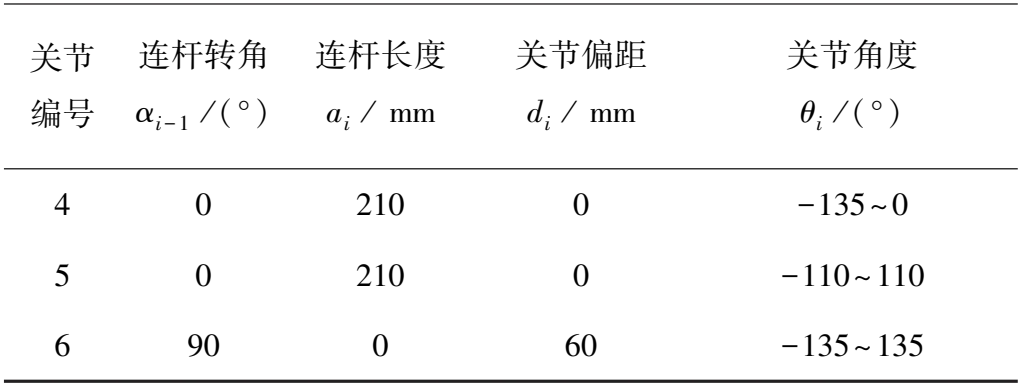
续表1
2 采摘机器人运动学分析
机器人各关节坐标之间的齐次变换矩阵为
其中,s2=sinθ2,c2=cosθ2,s34=sin(θ3+θ4),c34=cos(θ3+θ4),s345=sin(θ3+θ4+θ5),c345=cos(θ3+θ4+θ5)。
由此可以得出采摘机器人正运动学方程为
其中,nx、ny、nz,ox、oy、oz、ax、ay、az表示采摘机器人采摘机构的姿态信息;px、py、pz表示采摘机器人采摘机构的位置信息。
采摘机器人逆运动学求解是在确定好机器人采摘机构作业位置信息与姿态信息的条件下,求解各关节的变量,用来进行关节运动控制,从而实现采摘机器人作业过程的精准运动控制[11]。
采摘机器人逆解的数学表达式可理解为非线性方程组的求解,该逆解没有通用的求解方法[12]。因此,在求解过程中,使用代数迭代和几何求解相互结合的方式进行采摘机器人逆运动学求解,由此可以得出采摘机器人逆解表达式,即
θ4=
θ5=arccosay-θ3-θ4
3 采摘机器人虚拟运动仿真
机器人采摘机构轨迹规划算法包含直线轨迹规划和圆弧轨迹规划,在此利用SolidWorks实现采摘机器人执行机构的虚拟运动仿真[13-14]。图2所示为直线轨迹规划示意图;图3所示为圆弧轨迹规划示意图。虚拟仿真过程中,调用SolidWorks Motion模块,利用两种不同的方式获取采摘机构运行轨迹参数插补数据。
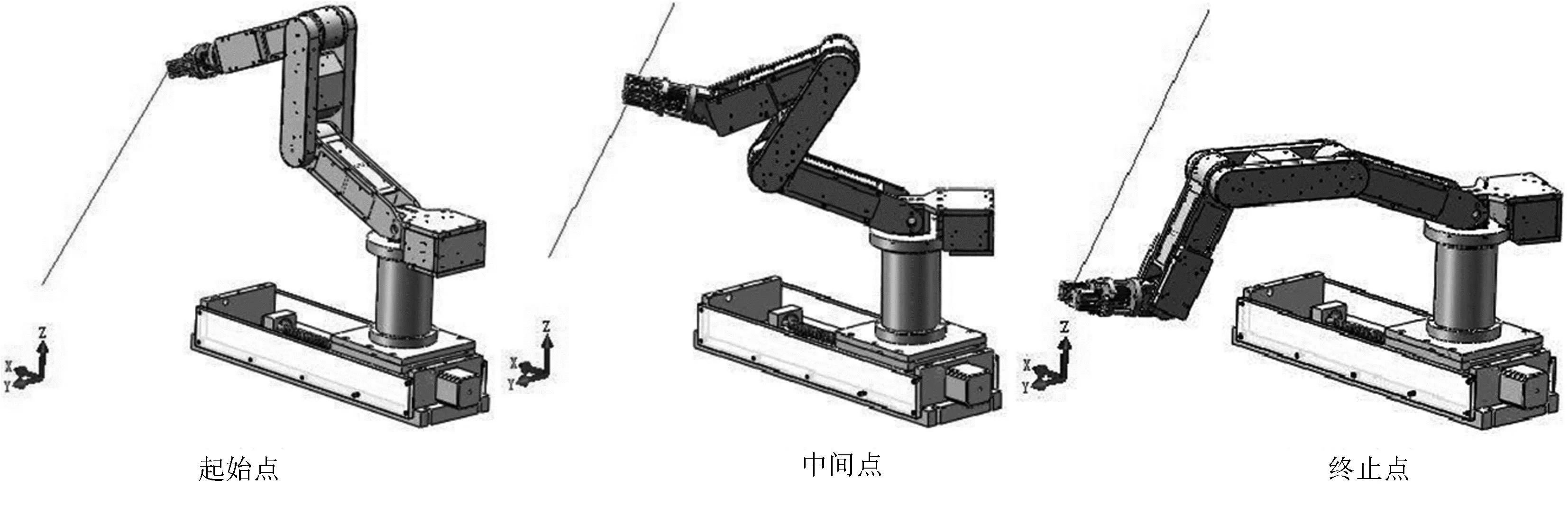
图2 直线轨迹规划示意图Fig.2 Schematic diagram of linear trajectory planning
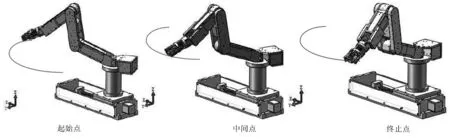
图3 圆弧轨迹规划示意图Fig.3 Schematic diagram of arc trajectory planning
4 联合仿真试验分析
采摘机器人在作业过程中,多个关节变量之间相互耦合,需对其进行协调控制。因此,使用LabVIEW中的控制向量对多关节进行协调控制。控制过程中,将不同的关节驱动变量配置为独立的向量,控制命令直接对独立的关节电机进行驱动,采摘机器人采摘机构按照设定的轨迹进行运动[15]。图4所示为采摘机器人运动仿真程序框图。仿真试验过程中,LabVIEW与SolidWorks之间利用通讯接口进行数据交互,实现采摘机器人的虚拟运动仿真。图5所示为采摘机器人执行机构运行轨迹曲线。
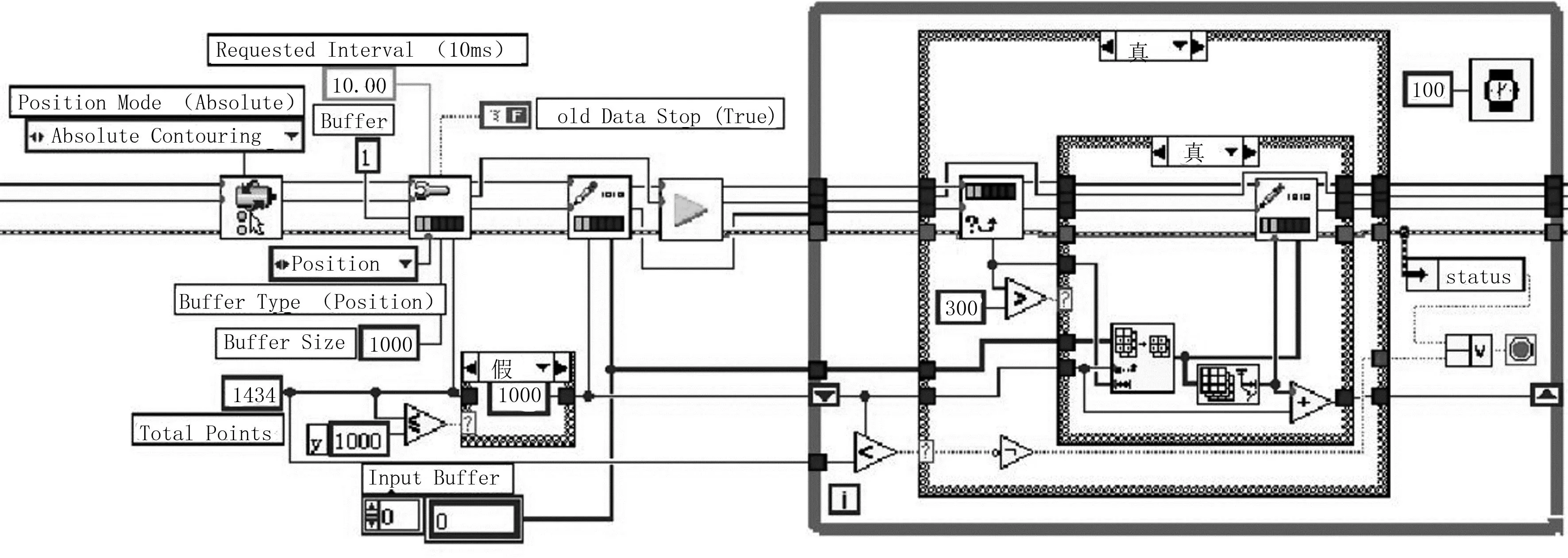
图4 采摘机器人虚拟仿真程序框图Fig.4 Virtual simulation program block diagram of picking robot

图5 采摘执行机构运行轨迹曲线Fig.5 Running track curve of picking actuator
5 结论
利用LabVIEW与SolidWorks进行采摘机器人运动学联合仿真,能够有效地对机器人的半物理模型样机系统开发进行控制,提高采摘机器人设计和使用过程效率,为采摘机器人的精准化和高效率作业提供依据。