天津北部山区典型地质灾害遥感监测应用
2024-01-09张志军姜兴钰
张志军,陈 楚*,王 琳,姜兴钰,陈 香
(1.天津市测绘地理信息研究中心,天津 300201;2.中国地质调查局天津地质调查中心(华北地质科技创新中心),天津 300170;3.中国地质调查局海岸带地质环境重点实验室,天津 300170;4.天津市海岸带地质过程与环境安全重点实验室,天津 300170;5.天津市测绘院有限公司,天津 300381)
地质灾害是指在地球的发展演变过程中,由各种自然地质作用和人类活动所形成的灾害性地质事件[1]。在自然条件和人为因素的共同作用下,天津市北部山区发育崩塌、滑坡、泥石流突发性地质灾害,成为天津市地质环境面临的重要问题[2,3]。为了在最大程度上减少人民生命财产损失,需要进行有效的监测和防护[4],动态掌握地质灾害发展趋势,加强风险管控。
遥感技术为地质灾害及孕育环境宏观调查提供先进的技术手段[5-9],贯穿于地质灾害调查、监测、预警、评估的全过程[10]。李捷等[11]将全站仪免棱镜测量技术应用于三峡库区地质灾害监测,大大降低了全站仪开展监测的工作量,提高了工作效率。梁京涛等[12]采用六期高精度无人机遥感影像数据,分析了文家沟特大泥石流震后的6次泥石流灾害过程,阐述并讨论了无人机遥感技术在高位泥石流动态变化监测方面的具体应用过程;通过多次动态监测泥石流变化,分析泥石流物源启动方式和治理方式。李杨[13]、闫驰[14]等人利用无人机倾斜摄影测量技术获取地质灾害点的高精度三维模型和纹理细节,对地质灾害调查、现状评估提供数据支撑。
上述研究采用图像全站仪和无人机低空遥感技术进行地质灾害监测,探索了一套合理、有效的滑坡、泥石流监测方法。本文以上述研究工作为基础,针对天津市北部山区地质灾害的特点,选取蓟州区肘各庄崩塌灾害点和东窝铺泥石流灾害点作为试验区域,探索实践图像全站仪测量技术和无人机低空遥感技术在天津市地质灾害遥感监测的具体应用。实践结果表明,图像全站仪的观测精度能达到mm级,解决了地质灾害监测人员对难以到达的监测点的监测;无人机低空遥感技术平面精度达到cm 级,通过获取的数字正射影像和数字表面模型能准确把握泥石流灾害周围地形情况和松散堆积物的分布情况。本文所做工作形成了遥感技术作为辅助地质灾害调查和监测手段的典型示范应用,为工作人员预判地质灾害危险性提供数据基础,对后续开展地质灾害调查监测具有一定的借鉴和指导意义。
1 基于图像全站仪的崩塌点遥感监测应用
1.1 肘各庄地质环境条件
肘各庄崩塌体地处山前倾斜平原与北部山区过渡地带(图1、图2),距离高速公路50 m左右,地貌单元为侵蚀剥蚀低山丘陵区,已有坡面风化岩体崩落。肘各庄崩塌体地形复杂(图3),崩塌体陡峭,坡高达到65.4 m,坡度为85°,坡宽30 m,坡长70 m。

图1 肘各庄崩塌体区位图Fig.1 Map of Jiaogezhuang collapse body

图2 肘各庄崩塌体远眺Fig.2 View of Zhougezhuang collapsed body

图3 肘各庄崩塌体现状Fig.3 Status of Zhougezhuang collapsed body
1.2 基于图像全站仪的崩塌体监测方案
1.2.1 监测要点
为了及时掌握崩塌体的发育情况,需要对崩塌体的缝隙进行有效的监测[15-16],即通过测量沿缝隙走向两侧便于观测的明显特征点,分析其坐标变化,当变化达到临界值时,需引起重视并做好预警工作。
1.2.2 监测思路
图像全站仪测量原理同轴可见红色激光相位测量,发出的激光束极为窄小,可以非常精确地打到目标上,保证高精度的距离测量。与有棱镜测量相比较,其优点是只要测点的反射介质符合免棱镜测量的条件,就不需要在测点上放置棱镜,即可测量出该点的三维坐标[15]。
针对崩塌地质灾害特点,监测人员因不能到达监测点上,故采用图像全站仪进行监测[17],在已知的两个控制点(A,B)上的一个点上架站,利用极坐标法[18-19],测出监测点的坐标。利用图像全站仪,监测人员不需到监测点架设棱镜,通过激光测距,精确测量出监测点的三维坐标并分析其变化,做好防范工作。
1.2.3 测量仪器
观测崩塌体的测量仪器为徕卡公司TS15i图像全站仪,测角精度为1",单棱镜测程为3 500 m,无棱镜测程为1 000 m,精度为±(2 mm+2×10-6D)。
1.2.4 实施崩塌体监测
(1)观测墩布置
为了减少人为操作误差,确保基础控制的统一,提高观测精度及稳定性,经过现场踏勘,在现场埋设了三个观测墩(图4、图5)作为已知控制点。由于受到山体的影响,观测墩二和观测墩三之间不能通视。经量测,观测墩一和观测墩二之间距离为108.061 8 m,观测墩一和观测墩三之间距离为111.391 6 m,将观测墩一作为后视,定为坐标系原点,观测墩一和观测墩二之间的连线方向定为X 轴,建立坐标系。三个观测墩安装后,能对崩塌体大部分缝隙进行观测。

图4 观测墩布设位置图Fig.4 Layout of observation pier

图5 观测墩现场图Fig.5 Site map of observation pier
(2)确立监测点
选取经地质专家指定的裂缝,为了监测该缝隙的变化趋势及方向,在沿缝隙走向两侧选取6个便于观测的明显特征点(图6)作为监测点,每次监测时都观测这6个监测点的变化。
(3)实施崩塌体监测
为了验证图像全站仪的观测精度,按照《工程测量规范》[20]中二等变形监测的要求,利用图像全站仪在上午10点左右和下午3点左右分别对上述6个监测点进行观测。每次观测都进行了两个测回。观测结果如表1所示。从表1可以看出,在无棱镜的情况下,利用图像全站仪对崩塌体进行多次观测,观测点的相对误差小于5 mm,满足《工程测量规范》[20]中三等变形监测的要求。

表1 图像全站仪观测结果(单位:m)Table 1 Observation results of image total station (unit:m)
在后续工作中,根据地质灾害监测相关要求,按照一定的监测频次进行观测。每次监测时,都是在上述三个已知的观测墩上,对图6中的6个监测点进行观测,并对测量数据进行分析,判断崩塌裂缝是否发生变化,当变化达到临界值时,需做好预警工作。
1.3 监测效果分析
通过对肘各庄崩塌体的监测实践,图像全站仪在崩塌变形监测中具有以下特点:
(1)解决了地质灾害监测人员对难以到达的陡峭石崖、危岩、高空物等监测点的监测,在确保了监测人员安全的同时,提高了作业效率。
(2)图像全站仪测量精度满足《工程测量规范》[20]中三等变形监测的要求。利用图像全站仪对地质灾害体多次持续监测,通过多期测量数据可采集地质灾害体变化信息数据,了解地质灾害演变特征,发现地质灾害体开裂等微观变化,为地质灾害危险性的预判提供数据基础。
2 基于无人机的泥石流点遥感监测应用
2.1 东卧铺地质环境条件
东窝铺泥石流位于天津市蓟州区许家台乡(图7),处于盘山旅游风景区西侧,东起盘山主峰挂月峰,西至宝平公路,南自盘山索道,北到北山梁,面积约2.0 km2。泥石流沟地势总体东高西低,最高点在泥石流沟东边界,高程为345.7 m;最低处沿宝平公路,高程为190.8 m。坡度15~25°,相对高差约155 m。地形多梯田呈阶坎状,坎边为人工垒石,表部多为耕地及经济林种植,上覆为第四系坡洪积层松散堆积物,厚度0.5~4.0 m。

图7 东窝铺泥石流三维遥感影像图Fig.7 Three dimensional remote sensing image of Dongwopu debris flow
东窝铺泥石流经长期的生物及工程治理已基本消除隐患,但由于该地区球状风化较强烈,随着时间推移,风化产生的堆积物将会逐渐增多,仍应长期进行泥石流稳定性动态长期监测。
2.2 基于无人机的泥石流监测方案
2.2.1 监测要点
泥石流的形成需要丰富的物源,堆积而成的大量固体松散物质为泥石流的形成提供了物源。物源的增加会改变泥石流危险范围,甚至超出防治工程的设计防治能力。因此,对泥石流域内物源变化进行监测,对物源变化后的泥石流灾害做危险性评价,预测堆积范围,预估灾害危险范围,对域内防治工程能力做出评估,可以为地质灾害监测部门提供决策支持,减少生命财产损失[21]。
2.2.2 监测思路
东窝铺泥石流灾害点具有以下环境特点:①涉及区域较大;②山势陡峭,树木茂密,人工不易到达,且不易看清山形特征和走势。无人机遥感具有时效性高,数据精度高,操作方便快捷的特点。基于以上分析,为准确把握泥石流灾害周围地形情况和松散堆积物的分布情况,利用无人机低空遥感技术[21-23]对东窝铺泥石流局部地区进行航摄,根据空三加密成果及其区域内的正射影像图和数字表面模型获取如下信息:①快速获取泥石流灾害点一定区域内的地貌形态;②准确把握泥石流的运动轨迹;③准确获取泥石流区域内建构筑物的分布情况,以便于进行灾后评估。
2.2.3 具体实施泥石流监测过程
(1)监测现场布设
按照低空摄影测量的需要,在监测区域内布设29个标志点(图8),其中25个控制点(红色),4个检查点(蓝色),具体分布如图9所示。

图8 标志点现场Fig.8 Landmark site

图9 标志点分布图Fig.9 Distribution of landmark
(2)无人机飞行摄影和数据处理
利用六旋翼无人机进行低空摄影,飞行高度为300 m。建立自由坐标系,利用全站仪对各标志点量测三维坐标。低空摄影时,使用索尼NEX7相机,相机主要参数为:主距18.75 mm,像元大小为3.9 um,航摄高度为300 m,像素分辨率为5~6 cm。摄影区域内的高差50 m。
数据处理基于SVS数字摄影测量系统进行。利用外业控制点进行空三加密,通过光束法区域网平差[24-25]得到加密点(含检查点)平面和高程坐标;然后生产制作DSM和DOM,获取区域内地形特征和遥感影像。
(3)监测数据精度统计与分析
经过内业几何数据处理,计算得到控制点和检查点的精度统计分别如表2和表3所示。
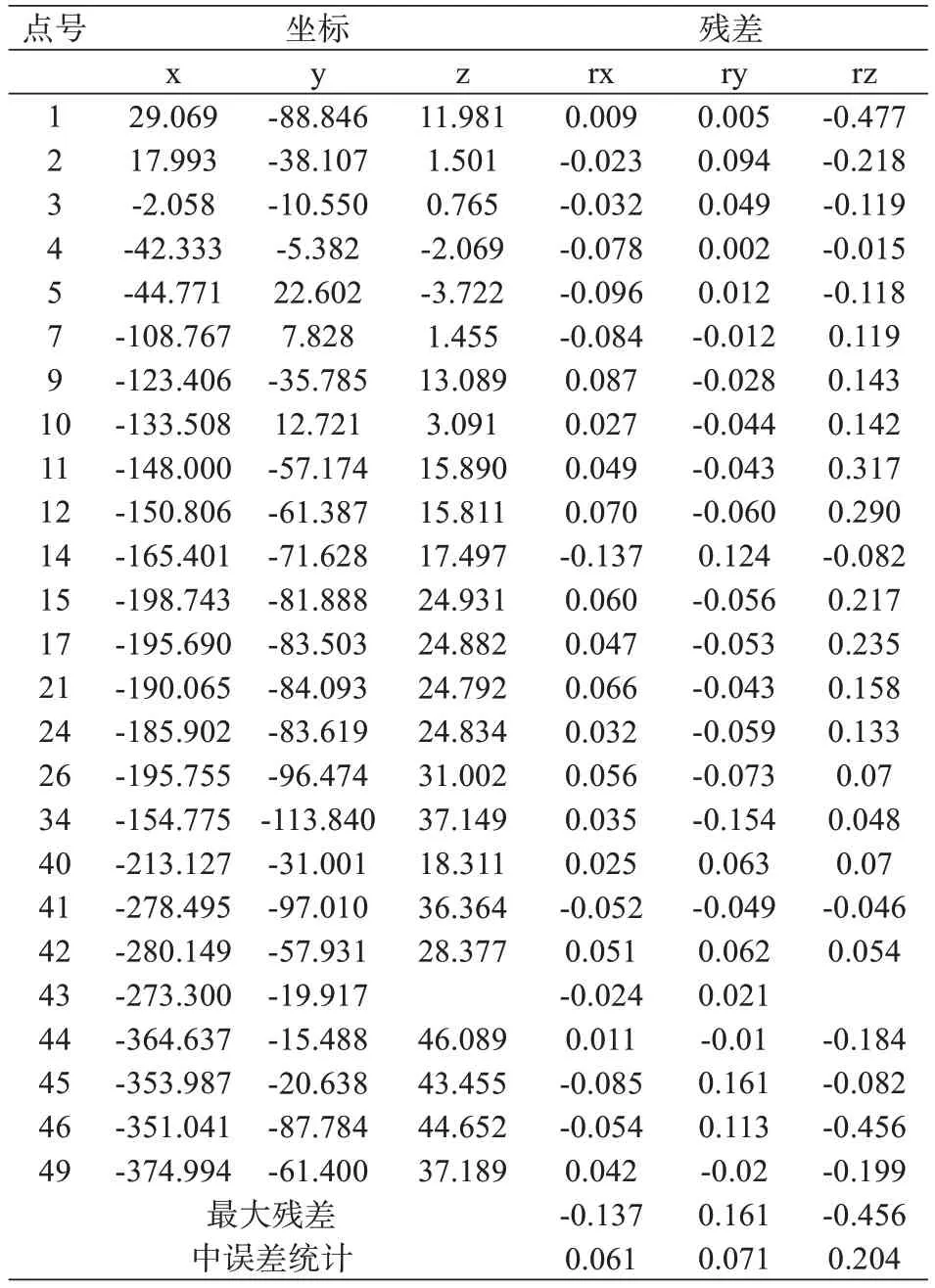
表2 空三加密过程中控制点精度统计表(单位:m)Table 2 Accuracy statistics of control points in aerial triangulation process (unit:m)
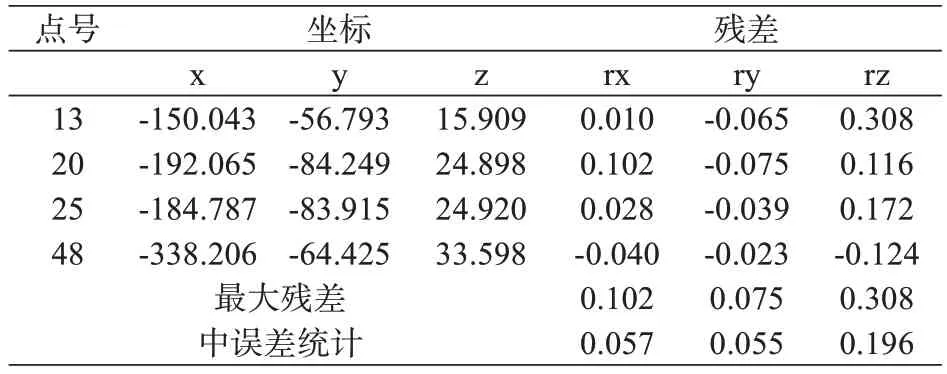
表3 空三加密过程中检查点精度统计表(单位:m)Table 3 Accuracy statistics of check points in aerial triangulation process (unit:m)
通过对比控制点和检查点的精度,可以得到:平面中误差保持在0.06 m 左右,高程中误差在0.2 m内,满足1/500DOM制作要求,能达到监测泥石流的需要。
2.3 监测成果应用及分析
通过对东窝铺泥石流灾害点的监测实践,低空无人机遥感技术在泥石流监测中具有以下特点及应用:
(1)控制点及检查点的平面中误差保持在6 cm左右,满足1/500DOM制作要求。
(2)利用无人机低空遥感,可快速获取区域的低空遥感影像(图10),以便快速分析区域地形特点,准确获取泥石流区域内建构筑物的分布情况。
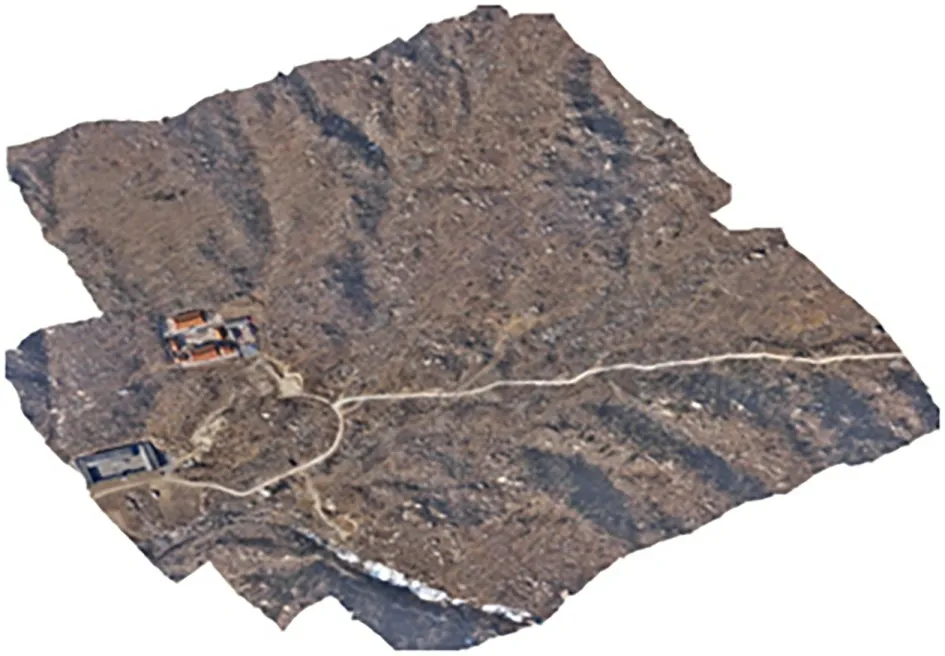
图10 无人机低空遥感获取的影像Fig.10 Images acquired by UAV low altitude remote sensing
(3)通过对低空遥感影像进行解译,快速确定物源的分布位置及范围(图11)。通过多次观测,根据空中三角测量后的高精度DEM测量,可计算形成物源区的体积变化。

图11 利用无人机获取的影像分析得到的物源区Fig.11 Provenance obtained by UAV image analysis
(4)通过区域内布设的标志点(图12),根据监测需要连续多次观测,可快速发现该物源的迁移距离和方向。

图12 监测布设标志点分析物源运动轨迹Fig.12 Provenance movement analyzed by monitoring the change of landmark
3 结论与建议
本文选取天津市北部山区崩塌和泥石流两种典型的地质灾害点,分别运用图像全站仪和无人机低空遥感技术对其监测。通过具体应用及其效果分析,得到以下两点认识:
(1)图像全站仪对崩塌体的监测,监测精度达到mm级,解决了地质灾害监测人员对难以到达的监测点的监测。通过多次持续监测获取地质灾害体变化信息数据,了解地质灾害演变特征,为地质灾害危险性的预判提供数据基础。
(2)无人机低空遥感技术对泥石流区域监测,监测精度达到cm级,可一次性覆盖整个泥石流影响区域,能够直观、客观查明物源分布位置、物源范围及面积。通过多次飞行获取遥感影像等基础地理信息数据,实现对被监测体的整体面域监测,快速把握被监测体的整体变化趋势和运动轨迹。
通过具体实践,图像全站仪和无人机等遥感技术在地质灾害监测方面有其特有的优势和应用前景,可为地质灾害监测提供更加精准的信息,但也有一定的局限性。图像全站仪和无人机等遥感技术容易受到天气等自然因素的影响,有时可能会出现遮挡现象等。随着测绘技术及多学科融合的发展,为更好服务于地质灾害调查与监测,建议在后续工作中从以下几个方面开展研究:
(1)开展星载InSAR(星载合成孔径雷达干涉测量)技术在地质灾害监测领域的应用研究。星载In-SAR 通过定期监测,有效反映地表形变的发展趋势和规律性,为长时间序列下地面沉降问题提供良好的技术监测手段。
(2)开展倾斜摄影、水下地形、三维激光扫描等研究,积极探索自然资源三维立体“一张图”的建设,探索三维数据在地质灾害防治和治理方面的应用。
(3)融合集成地球物理、基础测绘、GIS、遥感、地质勘查等各方面技术力量[26],增强地质调查发现隐患的技术能力和完善监测预警体系。