基于ARM Cortex-M3内核的嵌入式运动控制箱的设计与实现
2024-01-09严成武
严成武,韩 宇
(深圳技师学院,广东深圳 518116)
0 引言
随着工业技术的发展,运动控制技术也在不断发展,运动控制技术在制造业领域得到广泛应用。运动控制就是对机械运动部件的位置、速度等进行实时控制管理,使其按照预期的运动轨迹和规定的运动参数进行运动[1]。常见的运动控制解决方案为工控机+运动控制卡的方式[2],该解决方案具有稳定性好、性能强劲、拓展性强等优点,但是该方案成本较高,结构不够紧凑,在一些运动精度要求相对不高的运动控制场景,以及诸如作为初学者使用的教学实验载体,较高的成本往往会制约所述运动控制方案的普及。因此,设计一种性价比更高,能满足一些运动精度要求相对不高的运动控制场景的运动控制方案就很有必要。
为此,本文从技术和应用两个维度出发,针对性地设计出一套具有更高性价比的运动控制方案。该方案以嵌入式微控制器为控制核心,通过控制器对PWM信号进行调制,以控制伺服电机(或步进电机)。改变PWM 信号频率,可以调节伺服电机(或步进电机)的速度;改变PWM信号个数,可以控制伺服电机(或步进电机)的位置;此外,还可以通过控制器的数字输入/输出口,采集数字输入信号或控制其他数字设备[3]。该嵌入式运动控制箱成本低、功能强大、体积小,适用于对性价比要求较高、对运动精度要求相对不高的场合。
1 系统组成
本文所述的运动控制箱以第二代ARM Cortex-M3 为内核的32 位微控制器LPC1752 为控制核心单元,内置24 V 开关电源、3.3 V 稳压电路、光电隔离接口电路,所有电气部件固定在铁制外壳底座上,I/O接口通过上盖的香蕉插座接线端子与外围的伺服电机驱动器或步进电机细分驱动器连接,以实现控制功能[4]。系统组成如图1所示,实物如图2所示。
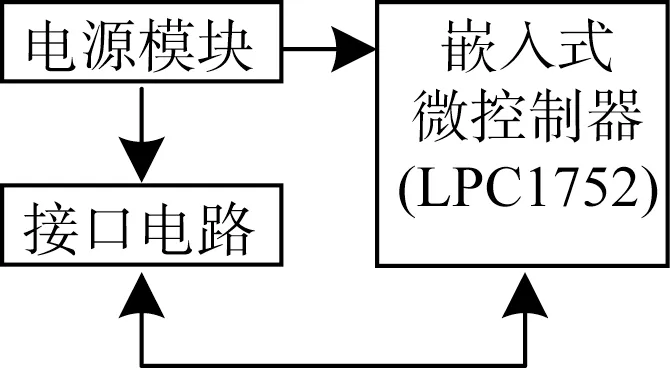
图1 系统组成

图2 实物
2 工作原理
基于第二代ARM Cortex-M3 内核32 位微控制器(LPC1752)的嵌入式运动控制箱通过嵌入式微控制器发送高低电平信号和PWM 信号,经过光电隔离接口电路,将3.3 V输出电信号转换为24 V输出电信号,实现与伺服电机驱动器或步进细分驱动器的通信,以控制伺服电机或步进电机。通过高低电平信号的变化,可实现对伺服电机或步进电机转向的控制;通过调制PWM信号的周期和数量,可实现对伺服电机或步进电机速度、位置的控制。最多可同时控制4 个伺服电机或步进电机。根据32 位微控制器(LPC1752)PWM 模块的工作原理,可由以下公式计算PWM 定时器的计数频率FPWM计数频率,计算公式如下:
式中:Fpclk为系统时钟频率;PWM1PR 为预分频寄存器,VPWM1PR为其值。
在32 位微控制器(LPC1752)中,使用匹配寄存器0(PWM1MR0)来控制PWM 的周期、频率,PWM 输出频率fPWM输出计算公式如下:
式中:PWM1MR0为匹配寄存器;VPWM1PR0为其值。
通过改变PWM1MR0 或PWM1PR 的值,就可以改变PWM 的输出频率,从而调节伺服电机或步进电机的速度。另外,通过控制PWM模块输出脉冲时间,从而控制PWM个数,就可以控制伺服电机或步进电机的位置[4]。
该嵌入式运动控制箱也可以通过嵌入式微控制器(LPC1752)数字输出口,发送数字信号,经过光电隔离接口电路,将3.3 V 输出电信号转换为24 V 输出电信号,实现对气缸或其他电气功能部件的控制,最多可同时控制16个气缸或其他电气功能部件。
该嵌入式运动控制箱还可以通过光电隔离接口电路,将24 V输入电信号转换为3.3 V输入电信号,连接到嵌入式微控制器(LPC1752)数字输入口,以实现对传感器或其他数字信号的读取,最多可同时读取16个传感器或其他数字信号。该嵌入式运动控制箱工作原理框图如图3所示。
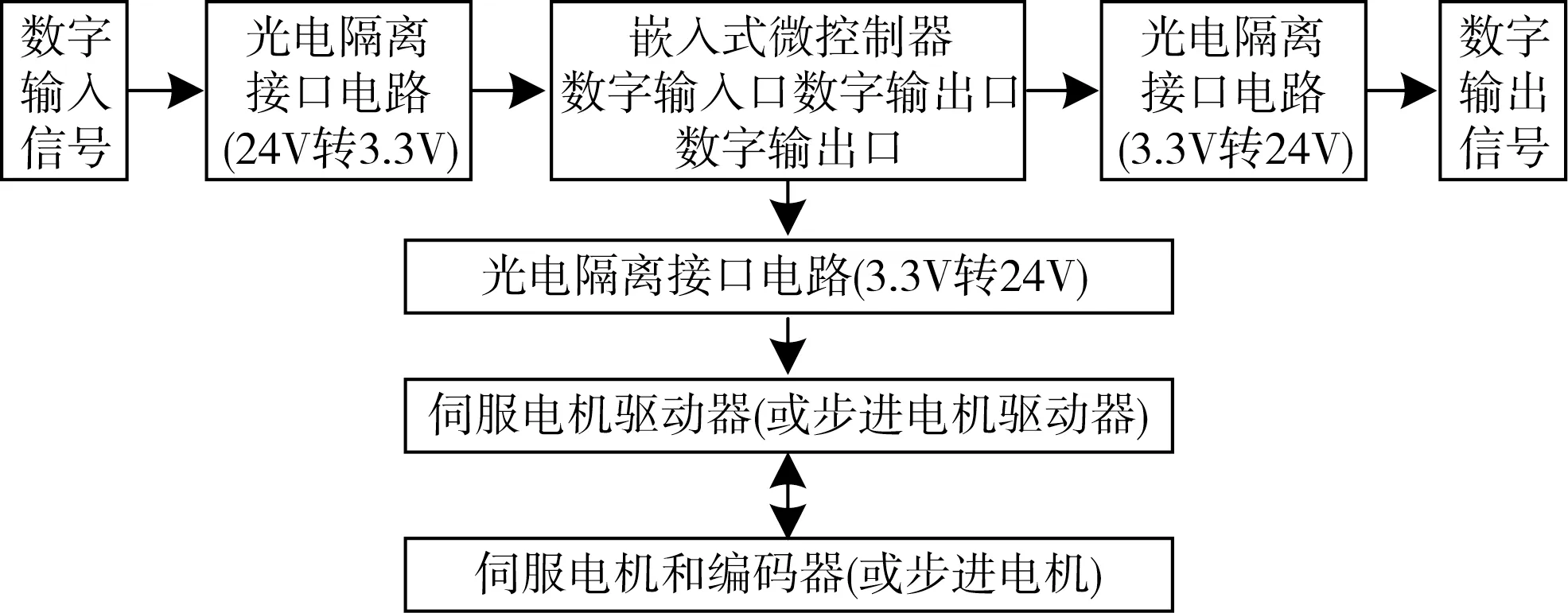
图3 工作原理框图
3 硬件电路
该嵌入式运动控制箱硬件电路分为嵌入式微控制器(LPC1752)管脚图、功能引脚图、系统电源框图、光电隔离接口电路图,具体如下。
3.1 嵌入式微控制器(LPC1752)管脚图
LPC1752采用LQFP80封装,管脚分布如图4所示。

图4 管脚分布
3.2 功能引脚图
P0.0~P0.31:P0 口是一个32 位I/O 口,每个位都有独立的方向控制,P0 口引脚的操作取决于引脚连接模块所选择的功能。P0 口的引脚P0.4、P0.5、P0.12~P0.14、P0.19~P0.21、P0.23、P0.24、P0.27、P0.28、P0.31不可用。
P1.0~P1.31:P1 口是一个32 位I/O 口,每个位都有独立的方向控制,P1 口引脚的操作取决于引脚连接模块所选择的功能。P1 口的引脚P1.2、P1.3、P1.5~P1.7、P1.11~P1.13、P1.16、P1.17、P1.21、P1.27不可用。
P2.0~P2.31:P2 口是一个32 位I/O 口,每个位都有独立的方向控制,P2 口引脚的操作取决于引脚连接模块所选择的功能。P2口的引脚P2.11~P2.31不可用。
P4.0~P4.31:P4 口是一个32 位I/O 口,每个位都有独立的方向控制,P4 口引脚的操作取决于引脚连接模块所选择的功能。P4 口的引脚P4.0~P4.27、P4.30、P4.31不可用。功能引脚图如图5所示。

图5 功能引脚图
3.3 系统电源框图
220 V 交流电经过开关电源,转换成24 V 直流电,再经过直流稳压电路,将直流24 V转成直流3.3 V。直流3.3 V为嵌入式微控制器的工作电源,直流24 V为接口电路工作电源。系统电源框图如图6所示。

图6 系统电源框图
3.4 光电隔离接口电路
光电隔离接口电路是基于ARM Cortex-M3 的嵌入式运动控制器实现与外围负载通信的桥梁,包括输入接口电路和输出接口电路。接口电路采用TLP521-4型可控制光电耦合器,实现ARM Cortex-M3 控制器与外围信号电平高低的转换和光电隔离[5-8]。
TLP521-4 是一种性能优良的可控制光电耦合器元件,其功耗为150 mW,隔离电压可达2 500 Vrms,广泛运用在电脑终端机、测量仪器、影印机、家用电器等电器设备中。其主要作用为使控制线路前端与负载之间完全隔离,增强电路的安全性,减小电压的干扰,同时简化电路的设计[9-12]。
3.4.1 输入接口电路
基于ARM Cortex-M3 的嵌入式运动控制器共有数字量输入接口20 位,能够实现多通道的数字量同时输入。图7 所示为输入接口电路局部,以TLP521-4 型光电耦合器为核心元件,外围输入端电压为DC24 V,当有外部信号输入时,通过输入接口电路转换,将信号转换为DC3.3 V弱电信号供ARM Cortex-M3处理器采集使用[13-14]。
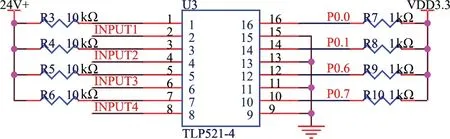
图7 输入接口电路
3.4.2 输出接口电路
基于ARM Cortex-M3 的嵌入式运动控制器共有数字量输出接口16 位和PMW 输出信号4 路。图8 所示为输出接口电路局部,以TLP521-4 型光电耦合器为核心元件。当系统对外有信号输出时,通过输出接口电路,DC3.3 V的弱电信号转换为DC24 V强电信号,控制外围注入电磁阀、指示灯等强电负载[15-16]。
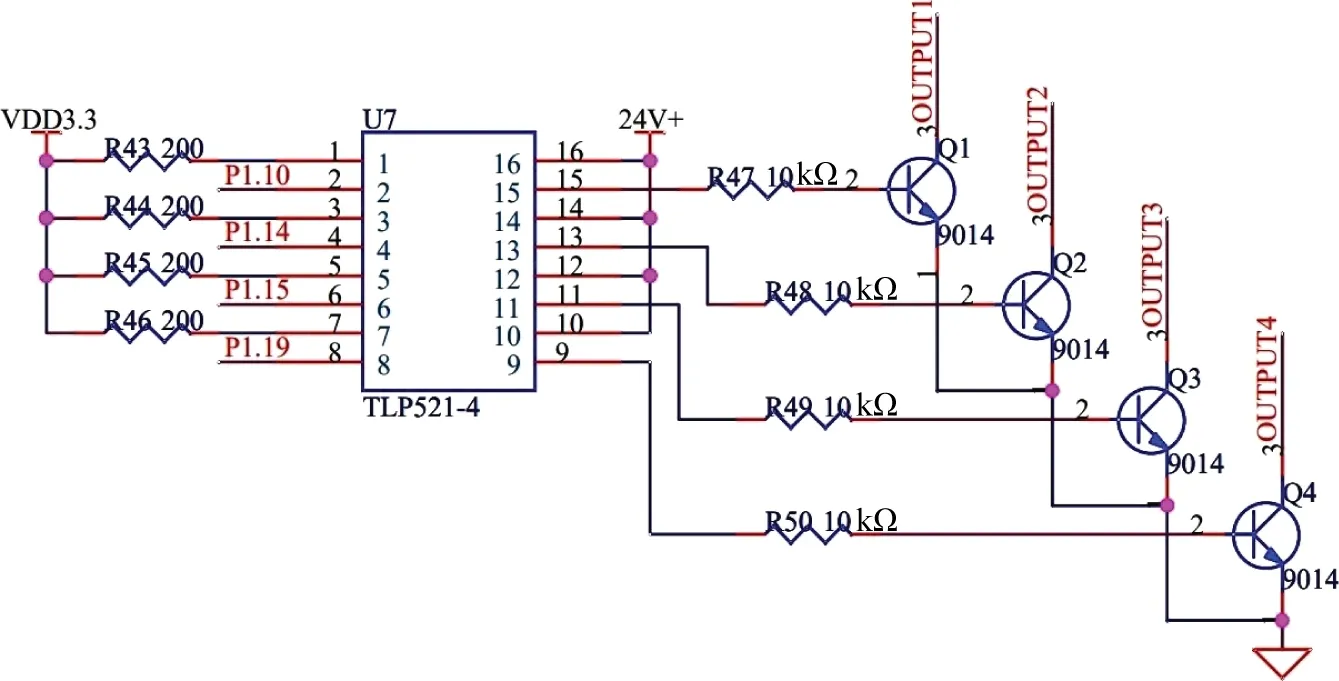
图8 输出接口电路
4 软件设计
下面介绍以基于该嵌入式运动控制器为控制核心,以智能机械手实训设备为控制对象的软件设计[8]。软件设计以C 语言为编程语言,按照模块化编程的原则编写程序,实现以下功能。
上电后,检测料筒是否有工件;无工件则等待,有工件则上料气缸动作,把工件推到皮带线上,皮带线动作;在皮带线上,通过颜色传感器判断工件颜色,通过电容式接近开关判断工件是否到位。如为白色工件,则工件到达皮带挡板后,皮带线停止,延伸气缸伸出,Z轴气缸下降,吸取工件,Z轴气缸上升,延伸气缸缩回;丝杆(伺服电机驱动)向右运行,根据仓库工件传感器的信号进行定位和Y轴气缸动作,延伸气缸伸出,Z轴气缸下降,放下工件;Z轴气缸上升,延伸气缸缩回,Y轴气缸复位;丝杆(伺服电机驱动)复位。如料筒有工件,则重复此过程。如为黑色工件,则皮带挡板松开,工件通过皮带挡板,到达皮带线末端。如料筒有工件,则重复此过程。智能机械手实训设备实物如图9所示。
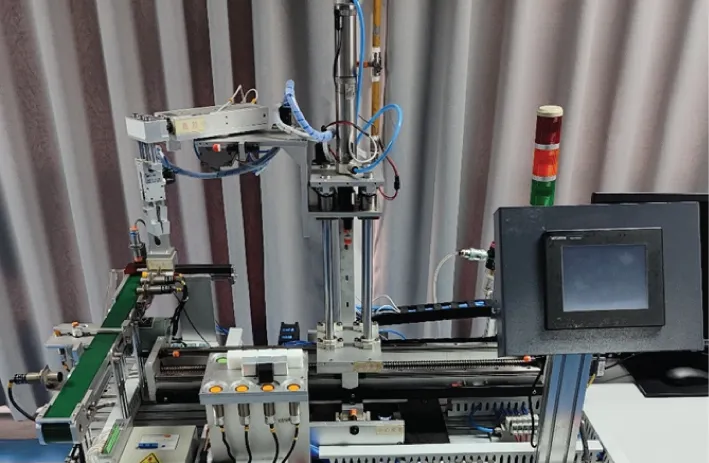
图9 智能机械手实训设备实物
该系统I/O 分配表如表1 所示,主程序流程如图10所示。

表1 I/O分配表
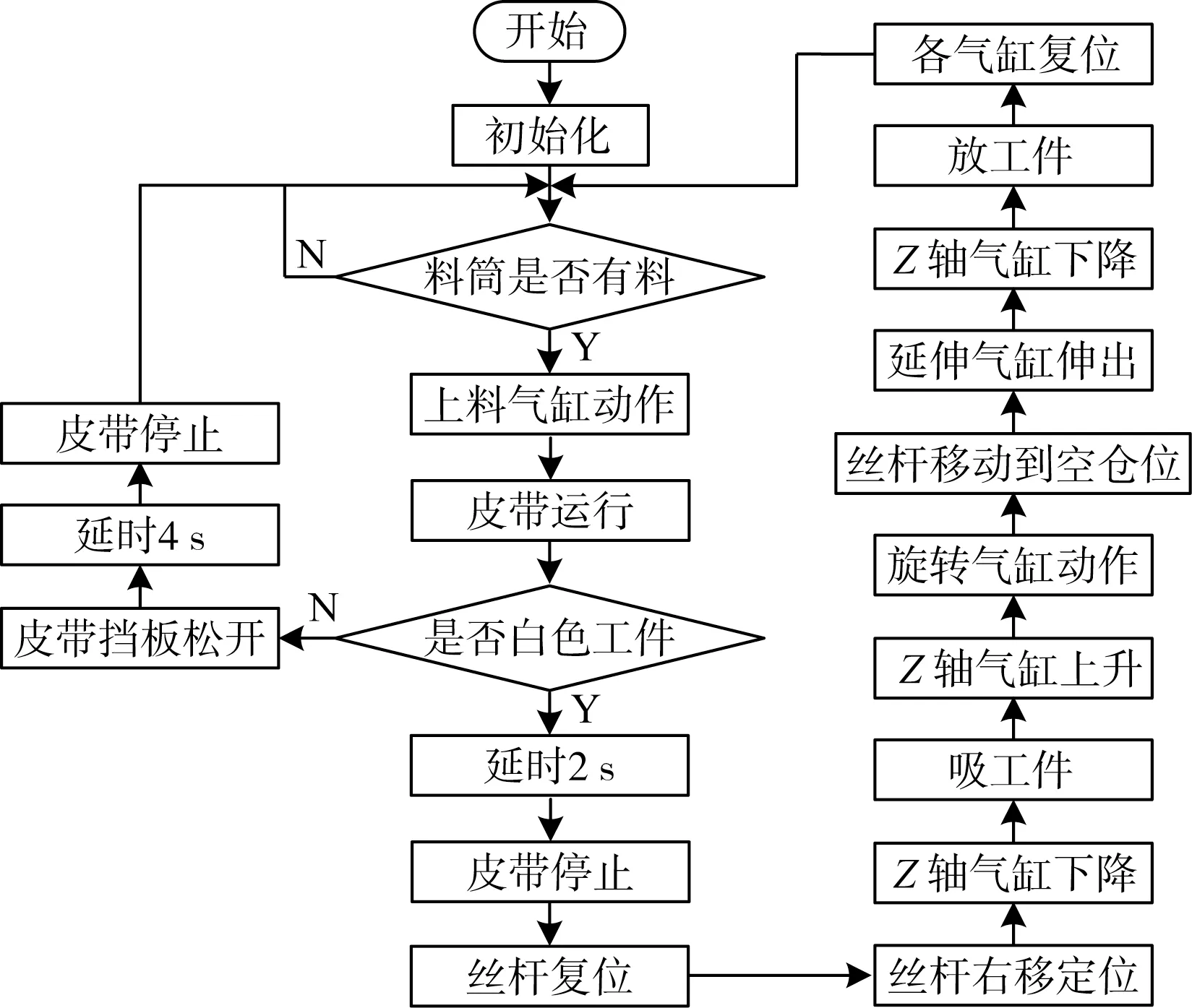
图10 系统主程序流程
5 测试结果
根据设计方案,制作出嵌入式运动控制箱并投入使用。测试结果如表2所示。
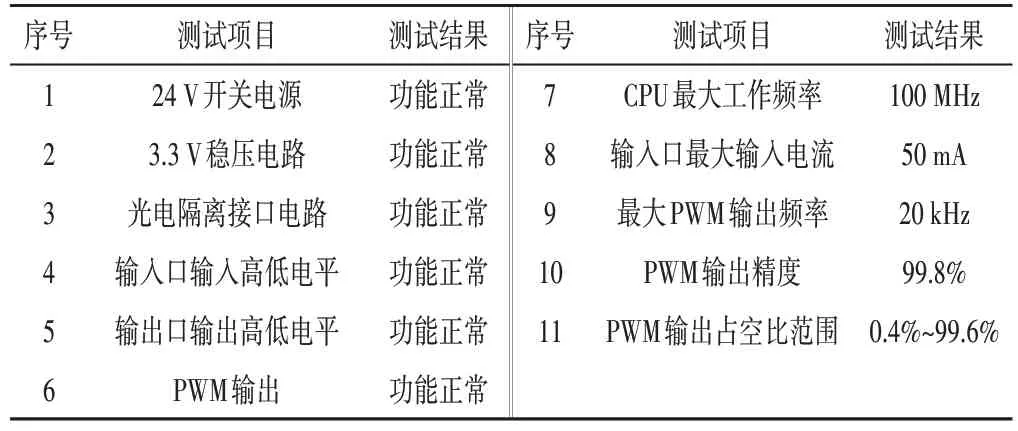
表2 测试结果
根据以上功能测试结果,可以确定预期的功能都可以实现。CPU 最大工作频率达100 MHz,说明系统能够以比较高的速度运行程序,保证了系统的时效性;输入口最大输入电流达50 MA,说明输入口可以承受较大的输入电流,能适应各种情况下的输入载荷;最大PWM输出频率达20 kHz,说明可以给伺服电机驱运器(或步进电机驱动器)提供比较高的PWM信号,以驱动伺服电机(或步进电机)以高速运转;PWM 输出精度达99.8%,保证了整个运动控制系统的精度能达到一个较高的水平;PWM 输出占空比范围为0.4%~99.6%,说明可以适应各种伺服电机驱动器(或步进电机驱动器)对输入PWM信号的占空比要求。以上测试结果证明了该嵌入式运动控制箱能达到预期的功能和性能,可广泛应用于对性价比要求比较高、精度要求相对不太高的运动控制场景[17-20]。
6 结束语
本文设计并实现了一种嵌入式运动控制箱。该运动控制箱内嵌电源模块,无需外加电源模块,具有如下特点:使用光电耦合器对模拟信号和数字信号进行隔离,避免了模拟信号干扰数字信号;通过优化设计,该运动控制箱成本低、体积小,性价比高;以第二代ARM Cortex-M3为内核的32位微控制器LPC1752为控制核心,功能强大,可实现4通道PWM输出、20通道的数字输入和16通道的数字输出。
通过实际验证,基于第二代ARM Cortex-M3 内核32位微控制器(LPC1752)的嵌入式运动控制箱可以实现预期功能,性能良好,性价比高,已在职业培训中投入使用,效果良好。
