光伏并网逆变器分数阶滑模二自由度内模控制
2024-01-08张冬冬葛孟超李保宗于培培
张冬冬,葛孟超,李保宗,于培培,李 达,逯 哲
0 引言
太阳能具有清洁无污染、可再生等优势,因此光伏发电技术成为直流微电网、孤岛发电、卫星通信、风光互补电站、城市轨道交通等领域的研究热点[1-2]。并网逆变器是光伏发电系统与电网连接的关键设备,其控制性能直接影响电网的电能质量。光伏并网系统具有明显的非线性[3-4],为提高系统动态性能和抗扰动能力,文献[5]在传统PI控制中加入滑模控制,提高系统的动态响应,但PI参数整定复杂且存在系统抖振;文献[6-8]采用高阶滑模控制算法,虽然在一定程度上改善了系统抖振问题,但高阶滑模控制算法复杂,控制律设计困难;文献[9-10]引入一自由度内模控制策略,该控制策略具有结构简单、整定参数较少的优势,解决了PI控制参数整定复杂的问题,但无法兼顾系统的跟随性和抗干扰性。相对于传统一自由度控制结构,二自由度内模控制可同时实现跟踪特性和干扰抑制特性的独立调节[11-12],分数阶滑模控制可有效削减系统抖振[13],二者结合,将有效改善系统内外环控制的鲁棒性和抗干扰能力。
本文在深入研究三相PWM逆变器物理参量之间动态关系的基础上,在传统滑模控制中通过引入分数阶微积分算子,电压外环采用分数阶滑模控制方法,电流内环采用二自由度内模控制方法,提出一种分数阶滑模二自由度内模控制新方法,并对并网跟随性和电压暂升情况下进行对比测试验证。结果表明,相对于传统滑模一自由内模控制方法,新控制算法可快速跟随网侧电压目标值,削弱系统抖振,提高系统的鲁棒性。
1 三相PWM光伏逆变器控制模型分析
三相PWM光伏逆变器拓扑结构如图1所示。

图1 三相光伏逆变器拓扑结构
图中:udc为逆变器输入电压;ipv为光伏阵列输出电流;iin为逆变器输入电流;uka、ukb、ukc为逆变器输出电压;ia、ib、ic为逆变器输出相电流;ea、eb、ec为电网电压;L为滤波电感;R为系统及滤波电感电阻;C为直流侧稳压电容。
三相PWM光伏逆变器在dq坐标轴下的数学模型表示为
其中:ukd=sdudc为d轴控制输入,ukq=squdc为q轴控制输入,sd、sq为开关函数;w为交流电网频率;ed、eq为电网电压d、q轴分量;id、iq为电网电流d、q轴分量。
忽略滤波电感L阻值和开关损耗,PWM逆变器直流输入功率和交流输出功率满足
当输出无功电流为0时,可得
根据电压定向矢量控制原理设计分数阶滑模控制器输入为电压跟踪误差,输出项为电流内环d轴参考值。
将edq看作干扰信号,由式(1)、式(2)可得内环电流子系统模型为
2 分数阶滑模二自由度内模控制实现
式中:D-α为分数阶积分算子,α为分数阶积分算子的阶数,0<α<1;c1为正定调整参数。
对式(8)求导可得
选择指数趋近律为
式中:ε>0,k>0。
由式(9)~式(11)可得电流内环参考值为
由内模控制器原理可知,二自由度内模控制系统输出为
式中:R(s)为系统输入;Y(s)为系统输出;和为二自由度内模控制器;G(s)为实际被控对象;为被控对象数学模型;D(s)为扰动。内模控制器用于跟踪目标信号,用于增强抗干扰能力和实现主动解耦。
由式(6)、式(7)可知:
为保证内模控制器的可实现性,提高系统稳定性和鲁棒性[14],引入低通滤波器L1(s)。由于PWM逆变器的开关频率为10 kHz,电流内环可看作一阶惯性系统,内模控制器为
将式(17)、式(18)代入式(14)得
通过调节系统参数α1、α2可实现无静差跟踪,增强系统抗干扰能力。电流内环二自由度内模控制原理如图2所示。

图2 电流内环二自由度内模控制原理
光伏并网逆变器分数阶滑模二自由度内模控制原理如图3所示。
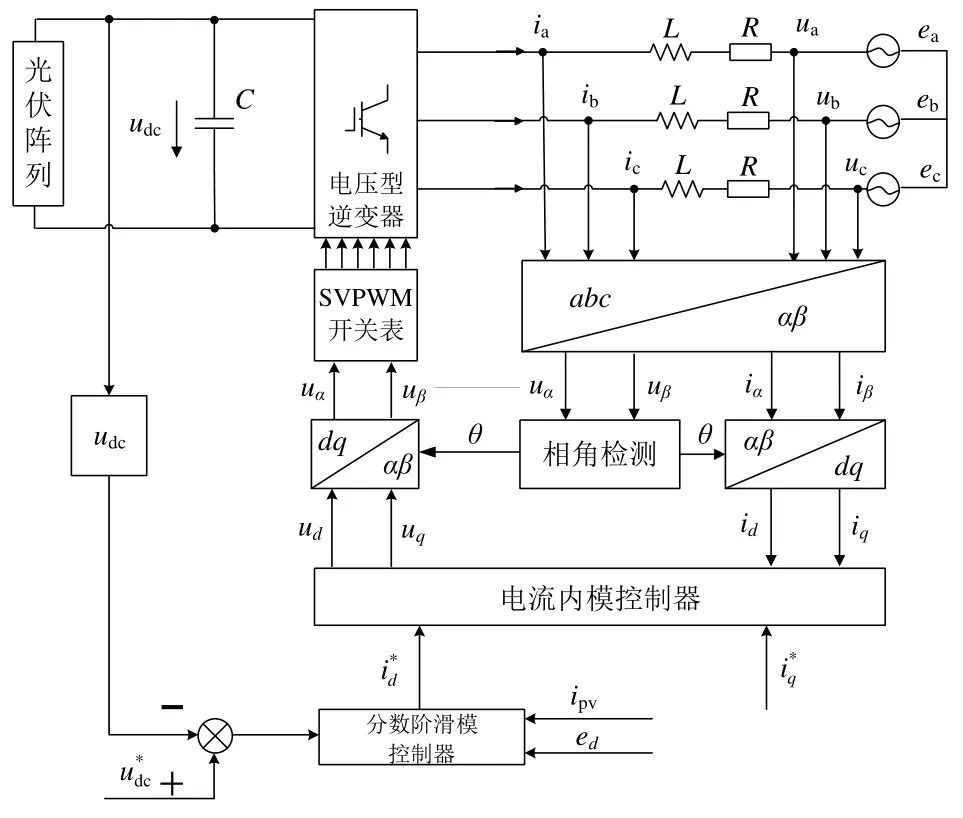
图3 分数阶滑模二自由度内模控制原理
三相静止坐标系下的电压ua、ub、uc和电流ia、ib、ic经过坐标变换,转换为αβ坐标系下的电压uα、uβ和电流iα、iβ。通过磁相角检测计算出变换角θ,根据iα、iβ和θ,得到dq坐标系下id、iq。外环控制系统根据式(12)得出电流内环控制系统目标值,电流内环控制系统依据式(17)、式(18)求得控制量ud、uq,最终通过dq-αβ坐标变换得到整流器各相开关信号,实现对系统的稳定控制。
3 仿真分析
为验证分数阶滑模二自由度内模控制策略的可行性,搭建系统仿真模型,与传统整数阶滑模一自由度内模控制算法进行对比分析,系统相关参数见表1。

表1 系统相关参数
3.1 并网跟随性测试
两种控制算法并网跟随性测试仿真结果分别如图4、图5所示。

图5 分数阶滑模二自由度内模控制仿真结果
对比图4、图5可知,两种控制算法均能实现单位功率因数运行,采用分数阶滑模二自由度内模控制,三相并网电流脉动明显改善,能快速跟随目标值且超调较小,畸变率相较于整数阶滑模一自由度内模控制降低0.96%,验证了该控制方法可快速准确跟随电网,改善并网电流脉动,降低谐波含量。
3.2 并网电压暂升扰动对比测试
在0.3 s时,并网电压由380 V上升至400 V,两种控制算法仿真结果如图6、图7所示。

图6 整数阶滑模一自由度内模控制仿真
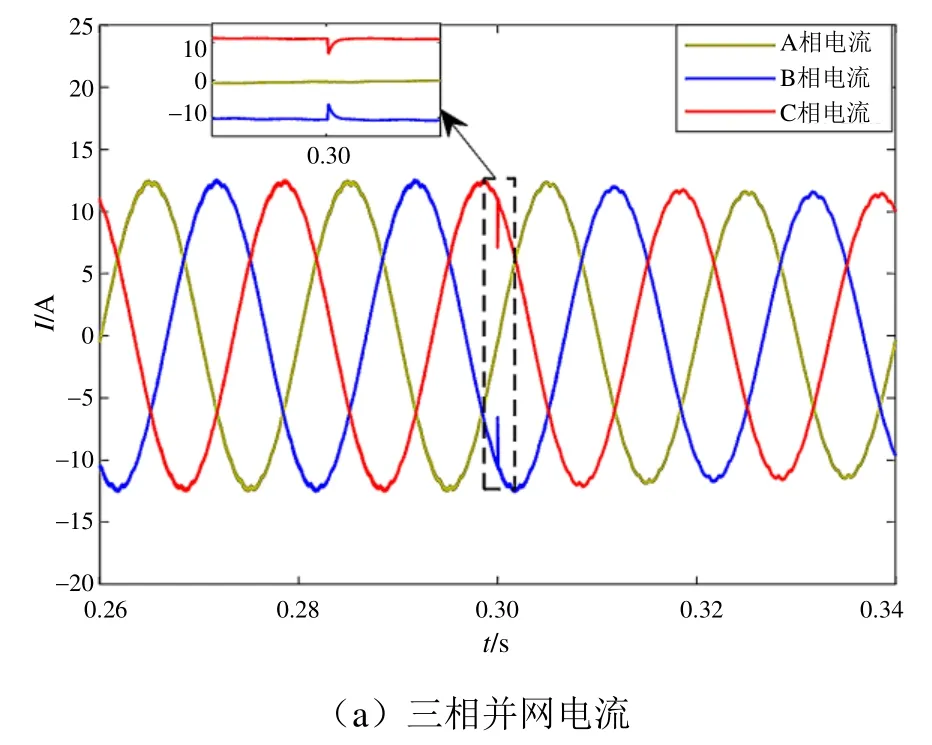
图7 分数阶滑模二自由度内模控制仿真结果
由图6、图7可知,在并网电压暂升情况下,采用分数阶滑模二自由度内模控制,输出功率几乎不受影响,并网电流畸变明显减小,仅需0.02 s即可达到新的稳定状态。由此可知,新控制方法具有较强的抗干扰能力和良好的鲁棒性。
4 结语
为抑制整数阶滑模控制存在抖振,改善一自由度内模控制无法兼顾系统跟随性和抗干扰性的局限性,通过引入分数阶微积分算子和二自由度内模控制算法,提出光伏并网逆变器分数阶滑模二自由度内模控制新方法。为验证新控制方法的可行性和高效性,分别进行了并网跟随性和电压暂升扰动情况下的对比仿真验证。仿真结果表明,相对于传统整数阶滑模一自由度内模控制方法,新方法能准确快速实现电网电压的跟踪,有效改善并网电流脉动,降低谐波含量,增强系统的抗干扰能力,对提升光伏并网系统鲁棒稳定控制性能具有重要意义。