三维激光扫描技术在建筑物三维建模可视化中的应用探究
2024-01-08赖建民卜鹏飞
赖建民,卜鹏飞
(1.广州南方测绘科技股份有限公司,广州 510630;2.湖南南方测绘科技有限公司,长沙 410000)
近年来,传统测量技术已无法满足现代建模要求,其主要利用二维平面矢量图和正射影像图为基础构建白膜,通过将纹理数据和高程数据应用在白膜上,从而完成传统测量工作。但由于传统建模方式存在生产成本高、劳动强度大、建模方法效率低等问题,被逐渐淘汰在人们视线中。而三维激光扫描技术可以有效解决人工建模中存在的问题,通过自动化数据处理技术来提高场景精细三维模型制作速度和精度,彻底突破传统测量收集数据单一的局限性,将建筑物局部细节和层次感完全体现出来。另外,通过利用三维激光扫描技术来收集各种纹理信息数据,自动生成TIN 格网模型和实景建模模型,深度还原现实三维场景。但目前很多测量工作人员都遇到如何建立基于点云数据的高效率采集和高精度三维模型的技术难题。基于此,本文主要目的是建立一个高精度三维模型,利用三维建模软件,将点云数据结合起来,实现建筑物的数据采集和数据处理工作[1]。
1 三维建模技术概述
三维建模是利用虚拟三维空间信息技术,来建设三维模型空间。从某方面来看,三维建模是随着计算机信息技术演化的信息化技术,在城市规划测量方面具有重要作用,能将土建信息、三维建模技术、二维地籍数据信息相互结合,从而合理规划土地,提高土地利用率。同时,能根据实际情况,收集三维信息技术处理测量数据,建立城市三维数据库,给城市规划提供丰富数据资源。分割后的建筑物点云数据能有效降低建筑物建模难度。工作人员采用L1-mean 算法提取单个建筑物的骨架线点云数据,给其选择建筑物点云数据切片方向提供丰富的数据资源,保证点云数据切片工作能顺利进行,为建筑物建模工作打下坚实基础(图1)。

图1 三维建模技术
2 点云建模问题分析
无论是地面3D 激光扫描还是机载3D 激光扫描,对于建筑行业而言,除了对点云数据角度、平整度、距离等基础数据进行分析外,还必须将各类云数据集中起来,自动生成三维模型,使三维建模技术发挥到极致。目前,三维建模软件趋于多元化,如草图大师、3dmax、Revit 等软件,其中点云数据导入功能可以在3dmax 和Revit 中实现,但需要事先转化为对应格式。但从目前实际应用情况来看,这2 个软件在向建模传输点云数据时存在问题:①点云数据承载量出现问题。虽然Revit 和3dmax 都可以导入点云数据,但通常只能满足轻量级的点云数据浏览,当点云数据超过千万时,软件一旦出现卡顿严重问题,根本无法正常使用。②点云建模问题。通常采用Revit软件和3dmax 软件作为三维建模常用软件,即根据项目内容进行三维建模,有利于提高其在二维图纸基准上的操作性和便捷性,而点云数据如果使用其他软件基础工具来构建基础三维模型,再应用Revit 软件和3dmax 软件进行建模,这种建模方式对模型的精确性无法保证,且造型效率较低,一般要测很多遍才能出来[2]。3dmax 软件可以导入点云数据文件,进行建模、纹理映射、渲染和导出,图2 为根据点云数据生成的三维模型。

图2 3dmax 软件导出模型
3 外业数据采集和三维模型重建
3.1 建模算法
在将二维图形转变为三维图形的过程中,其具有较强灵活性特征,只需要简单扫描图形设计,就能自动生成三维图形。根据截面和路径个数不同,工作人员可将扫略面分为多路径单截面线、多路径多截面线、单路径多截面线的扫略面,只需输入沿路径方向的截面形状曲线和路径曲线,就能自动生成完整物体。在路径上的线段有弧线段和直线段2 种类型,工作人员要针对不同线段提出对应处理方法,要将弧线段进行等分,计算出等分点坐标信息,将其作为沿路径方向截面坐标设置标准。另外,工作人员在计算出截面形状曲线数据时,全面分析顶点数据存储顺序,计算多边形中心点坐标,作为形体变换基点,再利用图形变换技术扫略截面形状曲线,将截面形状曲线顶点坐标转移到截面顶点坐标,保证截面法线方向和切线方向不存在严重差异性,有利于工作人员建立日常工作所需物体[3]。
3.2 外业数据采集
这片测试区是由大量附属建筑围合而成的老式住宅楼,整体人流较大,给测量人员的采集增加了点云采集的难度。因此,在进行建筑物外业测量前,进行现场调查,对建筑物扫描范围、路线等进行规划,避免后期出现重复测量、补测等工作内容。同时,在规划路线时尽量回到原起点,构建闭合环路,以减少数据解算过程中误差累积严重的现象。综合各方面外业采集条件,制定架站、车载、机载3 种点云采集相结合的作业方式,以便于全面地收集建筑物的点云数据。
在进行三维激光扫描前,根据扫描需求收集扫描区域内已有的测绘信息,包括控制点、各类地形图,确保在扫描作业前全面地了解区域内的地形地貌、人文信息、交通道路等信息。根据收集到的信息,初步确定扫描频率、扫描点云质量、扫描角度等相关扫描参数。
为了顺利开展三维激光扫描的数据采集工作,获取目标体空间三维点云,需组织现场踏勘,实地了解扫描区域的自然地理、人文及交通状况,并核对已有资料的真实性和适用性。任何的扫描操作都是在特定的环境下进行的,因此,对于环境复杂、条件恶劣的场地,在扫描工作前一定要对场地进行详细的踏勘,对现场的地形、交通等进行了解,对扫描物体目标的范围、规模、地形起伏做到心中有数,然后再根据调查情况对扫描的站点进行设计。
在采用架站测量时,采用南方SD-1500 地面式三维激光扫描测量系统进行作业,测量范围为1.5~1 500 m,测量速度可达200 万点/s,测量建筑物外立面,由于受三维扫描仪角度和视角的影响,距离过近会导致不能获取建筑最高处数据,架站扫描仪时应与建筑物保持10~20 m的距离;而更高的建筑,如几十米甚至几百米高,则需要在建筑的近处和远处都摆放,确保获取到完整的建筑信息。测量建筑物内立面时,通常建筑都是两边对称,所以内部架设站点是镜像摆放。扫描仪与对象要保持一定距离,保证扫描到完整的对象;同时要根据项目合理规划测站间距和测站数,提高作业效率和数据完整度。
在采用车载测量时,在车子启动前开启扫描,尽量减少在停车过程中造成的数据冗余。因相机文件较好进行处理且不影响点云精度,则遇红绿灯时相机可自主选择是否暂停拍照工作。遇到桥底隧道等信号失锁路段,应尽快通过,通过减少卫星失锁时间来尽可能减少点云精度的损失。
外业点云数据采集完成后,要对主体点云明显偏离的漂移点进行删除,以免后期在特征提取时产生误判,给建模精度带来严重的影响[4]。等到点云消音工作完成后,再对消音后的点云数据进行优化,以提高后期处理的便捷性(图3)。
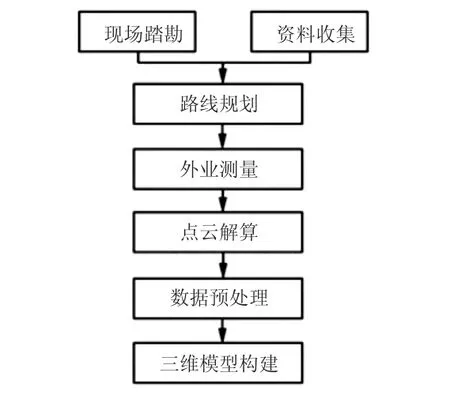
图3 技术路线图
4 三维模型重建
将预处理好点云数据导入到3dmax 软件。导入后,使用工具进行点云的调整和显示,创建表面模型,使用建模工具将其转换为表面模型。使用多边形建模工具,对点云进行建模、填充表面,并添加细节,使用“Editable Poly”或“NURBS”工具对点云进行建模、细分表面或生成曲线等,使用“ProOptimizer”等工具对点云进行优化、简化,将纹理映射文件导入到3ds Max 中,并将其应用于模型,使用“UVW Mapping”工具将纹理映射到模型的表面。对模型进行渲染,选择适当的输出格式和参数,如分辨率、帧率等,调整相机视角和位置,确保获得所需的渲染结果。
一般情况下,建筑物窗户的大小基本一样,如果在施工模型中发现有1 cm 以内的差异,则要按照相同尺寸造型,再综合考虑点云采集要求,预处理误差数据;若误差值超过1 cm 时,应对照点云进行建模处理(图4)。

图4 三维建模
在完成建模工作后,要检查点云,如果发现点云数据有不能贴合的现象,要进行删除重建,建筑物建模,要确保点云与模型相互吻合,如果有些点云观察细节不足,就说明模型较大;如果发现点云和模型中间可以看到明显的空间,说明模型的推拉度不够,且在尺寸空间上较小。因此,在改造模型的时候,为了便于工作人员观察,要把模型设置成透视图。本文提出一种模型自动生成算法,主要包括路径扫略、形体放样、布尔运算3 种方法。其中路径扫略是根据截面形状参数曲线和图形变换技术,设置内插截面法线,建立完整的三维模型;形体放样是将放样截面中不同位置的顶点进行结合,建立三角形小平面,将其作为建筑物表面,进一步完善三维建筑物形状;布尔运算作为常见的几何计算法,能完成复杂模型的三维建模[5]。
5 点云数据处理
点云数据处理软件采用南方SouthLidar 软件,具有海量点云浏览、点云渲染、点云纠正、点云裁剪、DEM 生产、点云量测、全景叠加量测、地图定位和DLG 矢量绘制等功能。
5.1 点云数据预处理
点云数据采集后,进行点云数据预处理。进行去除噪声、滤波、降采样等。去除噪声可以通过高斯滤波、中值滤波实现。滤波可以去除点云数据中的离群点,使得点云数据更加平滑。降采样可以减少点云数据的数量,降低计算复杂度。
5.2 点云数据配准
由于测量人员真实场景扫描范围较广,扫描时采用架站、车载、机载3 种方式进行扫描,才能保证扫描数据的准确性,但也导致每次扫描后的点云数据来自不同坐标控制点。而在进行三维建模时,工作人员要将全部扫描结果导入到同一个工程文件,要对架站、车载、机载中的点云数据进行配准。在配准过程中,地面的点云占比较大,却没有带太多的特征信息,会对配准造成干扰,配准前先进行地面去除,为了提高拼接精度,通过全站仪确定控制点的坐标,用三维激光扫描仪对控制点进行精确扫描。以控制点为基站直接将扫描的多测站的点云数据与其拼接,完成点云配准。
5.3 点云数据融合
配准后的点云,需要进行点云融合,局部点云部分点存在严重飘逸的情况,会给完整点云带来错误信息,所以需要对局部点云地图进行分割筛选,判断重叠区域,然后对重叠区域和完整点云进行加权融合,对于非重叠区域,通过聚类进行分割,筛选出需要的点云,最后完成点云融合。
5.4 点云数据检查
确保三维激光点云数据的完整性与质量,不允许存在明显的空洞,不允许存在点云错层与杂点;三维激光点云的精度,如扫描精度、拼接精度及转换坐标精度;三维激光影像点云数据的质量,不允许存在白色的浮动影像噪点。
5.5 点云数据导出
数据过滤采用手动选择和软件自动筛选2 种模式进行冗余数据和噪点数据过滤删除的方式进行数据优化,保留主体数据,能有效地减少数据量,提高作业效率。然后再利用裁剪框工具将建筑物框选出来,导出点云。
6 精度分析和成果生成
6.1 模型精度分析
为检验模型的精确度,以全站仪测量成果资料为基础资料,模型成果资料为对照资料,选取阳台、房屋拐角、窗沿等区域作为测量对象,进行5 组对比,见表1。
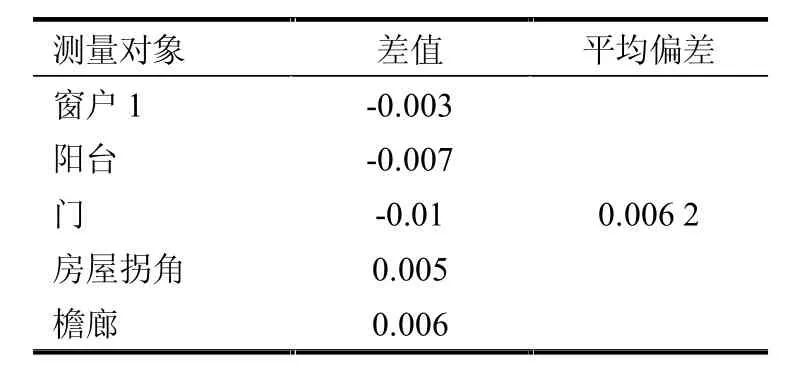
表1 模型精度检验分析m
通过分析表1,对比三维模型和全站仪测量的外立面特征点,发现两者尺寸差异性较小,最高尺寸差异程度为1 cm,最小尺寸误差值为3 mm,平均偏差是6.2 mm,能满足常规测量中外立面精度要求[6]。
6.2 成果生成
直接基于激光点云构建的建筑物模型是白模,虽然模型具有建筑物的三维外观轮廓,但缺乏真实感,为尽最大程度地达到逼真效果,还需要对其进行侧面纹理贴图。以构建的白模为基础,利用建筑物自动纹理贴图软件,可以将采集的建筑物4 个方面的影像数据快速贴在白模上,真实地再现建筑物外观。可以将构建好的建筑物模型,通过与全息影像融合进行纹理提取,在三维模型中显示与其对应的贴图纹理;利用点云数据为参考绘制建筑物平面、立面图,对建筑物门窗、空调机位、楼顶女儿墙、楼梯间及下水管等进行绘制标注,整理成果资料。
7 结束语
综上所述,通过将三维激光扫描技术应用到建筑物三维建模方面,有利于解决传统测量技术中存在的问题,如数据精度低、无法呈现建筑物立面形状、数据效率低等问题。同时,三维激光扫描技术提升外业数据采集效率,控制测量工作外业工作强度,增强测量数据准确性,解决以往建筑物立面数据总量不清楚的问题,提供三维模型、平面和立面图。