基于激光雷达局部地图构建的机器人避障路径规划
2024-01-05郝世宇
郝世宇,王 昆
(1. 山西工程职业学院 机械工程系, 山西 太原 030009)
(2. 山西大学 物理电子工程学院, 山西 太原 030006)
0 引 言
激光雷达是一种感知环境的传感器,它发射的激光波长比可见光和红外线更短,具有高能量和抗干扰能力强的特点,因此在环境目标的感知和识别中应用广泛。激光雷达还具有高分辨率、体积小等优势,在机器人行走过程避障路径规划的新领域受到了广泛关注。
为了提高机器人的性能,优化机器人导航、控制和避障能力,研究人员致力于机器人避障路径规划的研究。文献[1]通过分析机器人运动学规律获取机器人运动相关的节点信息,并建立基于全局路径节点信息的多种栅格全局地图。该地图内的路径轨迹平滑度较高,能够及时确定局部目标区域,有利于提升机器人避障检测效率。在该地图中,引入避障控制策略可实现机器人避障路径规划。然而,在复杂的避障环境下,全局地图的规划效果较差。文献[2]通过增加自我定位模式改善了机器人的运动系统结构。机器人自我定位模式可基于所处环境建立寻径运动模型,并在虚拟算法的协助下求解该模型,以实现机器人避障路径规划。然而,该方法的全局地图对机器人避障路径规划效果较差。文献[3]通过虚拟机器人收集了大量不确定任务情况下的随机运动轨迹,并将轨迹输入以惩罚避障函数为基础构建的快速轨迹规划模型中。根据模型输出的运动轨迹观测值,构建全局地图,实现机器人避障路径的规划。但是,该方法在普通避障环境和复杂避障环境下,都存在机器人避障路径规划效果较差的问题。
为了解决上述方法中存在的问题,提出基于激光雷达局部地图的机器人避障路径规划的方法。
1 构建全局与局部地图
地图构建是机器人避障方法设计的基础。为了进一步增强机器人避障问题的完整性,本文将地图构建分为全局和局部两个层次。全局地图利用深度信息采集设备获取数据,为机器人提供整体视角的环境信息。然而,在机器人避障过程中需要更为详细的数据,因此引入激光雷达技术,结合激光聚合和分割方法,构建任意线段与端点之间的区域,并基于全局地图构建具有更多细节信息的局部地图。通过这种方式,可以为机器人提供更加准确和完整的环境地图,从而更好地解决机器人避障问题。
1.1 全局地图的构建
(1)Kinect传感器采集机器人环境深度信息
Kinect是微软公司开发的一款外设传感器,其核心设备由彩色摄像机、红外线发射器和红外线互补金属氧化物半导体(CMOS)摄像机组成。其能够快速地同时获取场景彩色图像和深度信息,且不受环境可见光谱干扰,成本低。利用机器人内设Kinect传感器[4]采集所处环境的深度信息,并建立基于所处环境的全局地图,是实现机器人避障路径规划的第一步。Kinect传感器是由可见光传感器和深度传感器共同组成的深度信息采集设备,其针对所处环境深度信息的采集主要分为两部分,一是利用可见光传感器采集所处环境的彩色图像数据,二是利用深度传感器采集所处环境的红外光斑数据。
(2)深度信息转化为3D信息
Kinect传感器不仅负责采集机器人所处环境的深度信息,还能将采集到的深度信息传送至机器人操作系统(ROS)[5]。ROS具备视图化技术,能够将采集到的深度信息转化成3D视图,构建属于机器人当下场景的全局地图。Kinect传感器传送深度信息的过程借助了有效信息融合原理,因为ROS仅接收3D信息,所以在深度信息传送前需要根据有效信息融合原理将深度信息有效融合成3D信息。有效信息融合原理的表达式为
(1)
式中:L表示有效融合常数;I表示参与传送的深度信息量;ω表示深度信息的权重;z表示3D信息转化系数。
ROS接收来自Kinect传感器的3D信息,视图化技术利用结合了2D 同步定位与地图构建方法和惯性传感系统导航(Hectot SLAM)算法读取3D信息基于三维空间的实际场景数据,并将数据映射至X轴、Y轴和Z轴,使每个数据都具备几何效应。满足几何效应的实际场景数据不仅描绘了机器人所处环境的周围情况,还记录了形状大小各异的障碍物位置信息,为后续机器人避障路径的规划提供有力的保证。Hectot SLAM算法的表达式为
(2)
式中:N表示Hectot SLAM常数;δ表示实际场景数据的读取率;d表示实际场景数据的读取误差。
视图化技术在获取满足几何效应的实际场景数据后,会主动向ROS传递指令。指令通信是ROS特有的任务呈递流程,ROS会在接收到指令的第一时间开启三维模拟器,将实际场景数据引流过来,用以搭建机器人所处环境的相关地图。三维模拟器首先利用Gmapping算法获取基于实际场景数据的建模匹配点,再利用激光扫描仪在建模匹配点的基础上重塑环境信息,最终实现机器人所处环境全局地图的构建。全局地图定位点的计算方法为
(3)
式中:λ表示Gmapping常数;xl表示建模匹配点获取系数;xm表示建模匹配点获取误差。
三维模拟器搭建的全局地图如图1所示。

图1 三维模拟器搭建的全局地图
1.2 基于激光雷达的局部地图构建
激光雷达作为机器人导航定位和路径规划中的常见技术[6],往往能通过激光聚合和分割的方法,在短时间内获取任意线段与端点之间的区域,并在全局地图的基础上,构造出信息储存量充足且逼真度较高的局部地图。构建局部地图的目的是为了细化机器人所处环境,提升避障路径规划的可行性。激光雷达构建局部地图主要分为三个步骤,即坐标转换、线段分割、构建局部地图。
(1)坐标转换
激光雷达同时扫描机器人所处环境和全局地图的数据点,通过对比两处数据点分布情况,识别全局地图的缺损数据。全部数据点均以激光雷达中心发射点为坐标原点,这样获取的每个数据点坐标清晰,减少了地图创建误差的可能性。为了将数据点连接成能够分割的线段结构,需要利用笛卡尔公式将全部数据点坐标转化为笛卡尔系下的全局坐标。笛卡尔公式的表达式为
G=cos(t·2π·xi/360)cosβ
(4)
式中:t表示笛卡尔常数;xi表示原始数据点坐标权重;β表示数据点坐标转化误差。
(2)线段分割
经过笛卡尔公式转化的数据点坐标能够在线性函数的作用下,将邻近坐标聚拢在一起,共同连接成一条描述机器人所处环境线性区域的矢量线。线性函数的表达式为
(5)
式中:N表示线性常数;yn表示邻近坐标聚拢系数;m表示矢量线连接误差;θ表示单位数据点的坐标权重。多条矢量线将机器人所处环境分割成了多个线性区域,从二维视角观察机器人所处环境的线性区域,其示意图如图2所示。
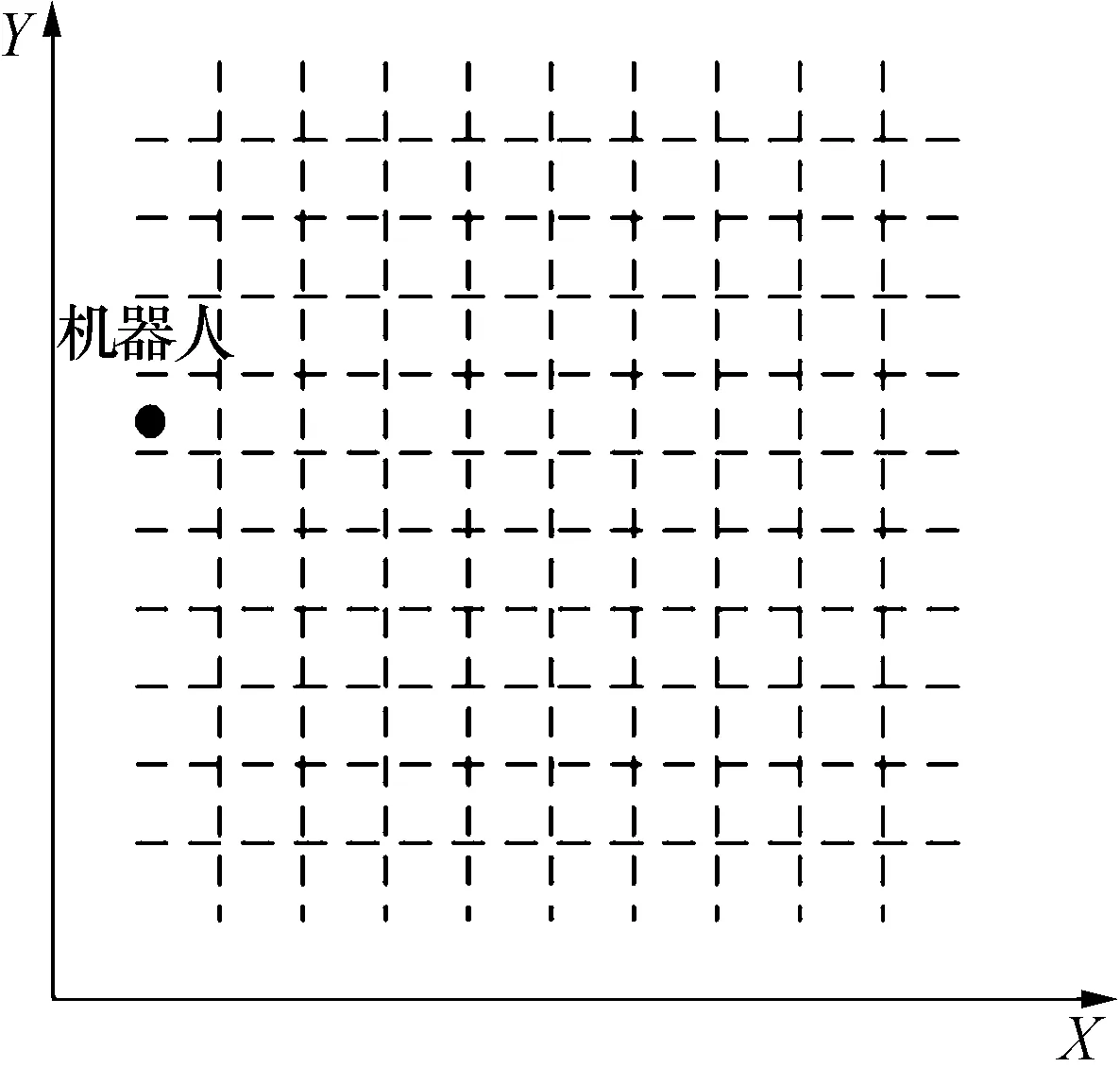
图2 机器人所处环境的线性区域
(3)局部地图的构建
如图2所示,经过线段分割的机器人所处环境从原始的大面积区域转化成了由矢量线分割的小面积线性区域。以线性区域为单位,利用动态阈值方法构建机器人所处环境的局部地图。纵轴坐标计算点表达式为
(6)
式中:εi表示动态阈值常数;y0表示局部地图构建参数;yi+1表示局部地图构建误差。
利用协方差函数将Kinect传感器建立的全局地图和激光雷达建立的局部地图重叠在一起,使根据机器人所处环境所建立的虚拟地图得到全面细化。局部地图的横坐标为
(7)

胃肠道间质瘤形态大多为圆形或椭圆形,边缘清晰,为分叶状,非常容易发生出血、坏死和囊变,CT诊断密度不均匀,MRI诊断为软组织,能够清楚看到囊变和坏死。本次研究,40例患者中,22例发生分叶,坏死和囊变比较常见,直接超过5cm都属于坏死和囊变。对27例患者使用CT和MRI增强扫描,肿块没有明显强化。有研究指出,根据肿瘤血管可以判断肿瘤恶性程度,本次结果,14例发现肿瘤血管,7例属于高度危险性,4例属于中度危险性,3例属于低度危险性。本组患者没有全部进行增强扫描,34例患者获得准确定位,准确率为85%。
2 路径控制中的模糊PID控制器设计
模糊比例积分微分(PID)控制器又称模糊PID控制系统,其设计理念参考了移动机器人运动学模型,该模型利用Cartographer算法[7]优化机器人控制参数,并在拉格朗日定律的协助下规划机器人运动轨迹。模糊PID控制器将移动机器人运动学模型与3D视觉传感器[8]相结合,在保留模型跟踪控制性能的同时,还增加了信息反馈平台,使机器人在途中遇临时障碍物时,能够第一时间反馈障碍物信息[9],并重新规划避障路线。Cartographer算法的表达式为
(8)
式中:Ye表示Cartographer常数;φm表示机器人控制参数的优化系数;H表示机器人控制参数优化误差。约束条件表达式为
(9)

模糊PID控制器[10]以路径规划和约束条件为基础,由控制层和导航层两大模块组成。模糊PID控制器结构[11]如图3所示。
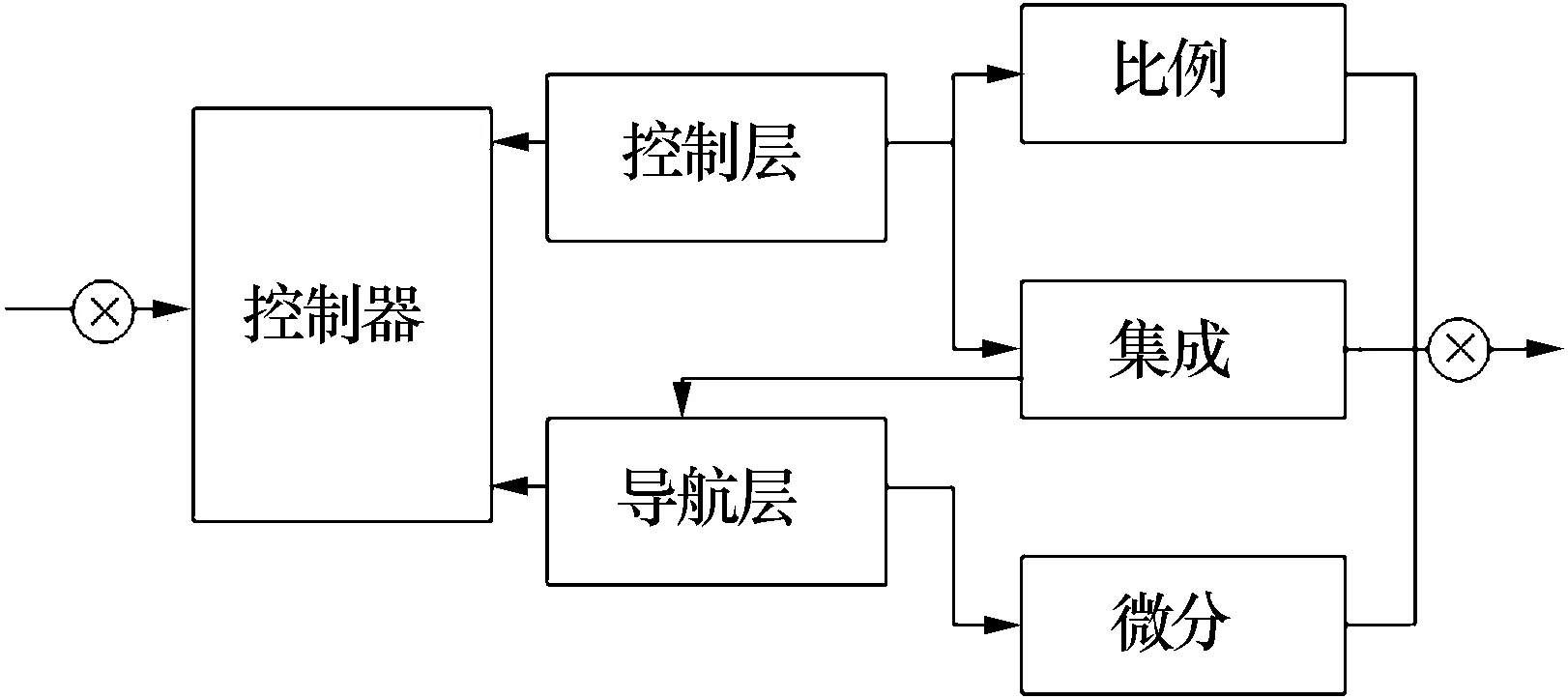
图3 模糊PID控制器结构
模糊PID控制器在Kinect传感器和激光雷达所建立的虚拟地图上规划机器人避障路径,其具体步骤如下:模糊PID控制器首先启动控制层的比例模块[12],利用模糊隶属度函数计算虚拟地图与实际场景的比例值,然后将比例值结果传送至导航层。导航层作为机器人避障路径规划的核心结构,在接收到来自控制层的积分信号时,会第一时间读取虚拟地图的障碍物位置信息[13],同时规划机器人避障路径。
模糊隶属度函数的表达式为

(10)
式中:e(r)表示模糊隶属度常数;y(t)表示虚拟地图与实际场景的比例值计算误差;k表示虚拟地图的参数。将以上函数计算出的结果传送至导航层[14]后,得到的机器人避障路径规划的表达式为
(11)
3 实验设计与结果分析
3.1 实验测试参数
为了验证基于激光雷达及模糊PID的机器人避障路径规划的整体有效性,需要对其进行测试。在测试平台上构建普通、复杂两种机器人避障环境,以此测试实验方法的有效性。实验环境均为50×50的二维直角坐标系,黑色区域为障碍物位置,机器人起始点与终止点位置固定,起始点坐标为(0,100),终止点坐标为(100,0)。对比不同方法在两种实验环境下的机器人避障性能,判断不同方法的机器人避障路径规划性能。选择四种型号不同的机器人参与实验,如图4所示。四种型号的机器人参数如表1所示。

表1 四种型号的机器人参数

图4 四种型号的机器人
激光雷达机器人避障实验具体的测试参数如下:
(1)激光雷达参数:雷达型号为Hokuyo UBG-04LX-F01,旋转角度范围为± 135°,分辨率为0.25°,最大扫描速度为10 000 rpm,最大测距距离为4 m。
(2)机器人运动控制节点参数:控制算法为模糊PID,路径规划算法为全局地图与局部地图算法。
(3)障碍物模型参数:障碍物形状为正方形、圆形和多边形,其宽度和高度为0.5 m~1.5 m,长度为1 m~3 m。 包含多个不同形状、大小的障碍物。
3.2 普通障碍环境实验
普通障碍环境仅采用独立障碍物作为测试样本。分别采用文献[1]提出的多重A*算法的机器人避障路径规划方法和文献[2]提出的自我定位模式的机器人避障路径规划方法作为实验的对比方法,普通障碍环境下不同方法的避障路径如图5所示。

图5 普通障碍环境下不同方法对于四种型号的机器人避障路径规划结果
如图5所示,在普通避障环境下文献[1]方法和文献[2]方法对于四种型号的机器人避障路径规划结果与障碍物接触明显,且路径选择并不是最优距离,说明采用文献[1]方法和文献[2]方法规划机器人避障路径的效果较差。所提方法在普通避障环境下的机器人避障路径均未与障碍物接触,且路径选择呈现最优距离,说明采用所提方法规划机器人避障路径的效果较好。这是因为所提方法采用Kinect传感器和激光雷达建立机器人所处环境的虚拟地图,并结合模糊PID控制器,在虚拟地图的基础上规划机器人避障路径,使最终获取的机器人避障路径规划结果更加简洁,避障率更高。经上述对比可知,所提方法针对机器人避障路径的规划效果明显优于传统方法。
3.3 复杂障碍环境实验
复杂障碍环境采用曲折的U型障碍物作为测试样本。分别采用所提方法、文献[1]方法和文献[2]方法规划上述四种型号的机器人避障路径,结果如图6所示。
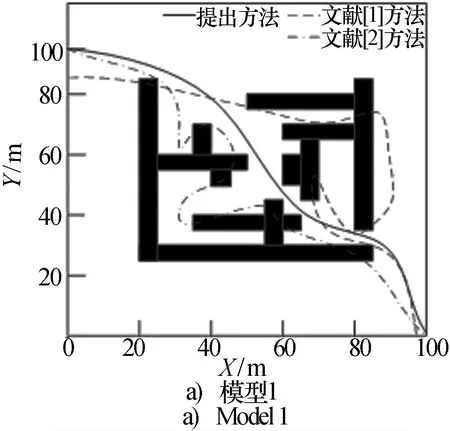
图6 复杂障碍环境下不同方法机器人避障路径规划结果
如图6所示,所提方法在复杂避障环境下对于四种型号的机器人避障路径规划结果均未触及障碍物,且路径选择呈现最优距离。本次实验结果说明,所提方法适用于较为复杂的环境,进一步验证了所提方法对机器人避障路径规划的良好效果。
4 结束语
激光雷达可以通过发射高能量的激光并根据返回的数据确定周边环境的信息,受外界干扰小,可将其与模糊PID控制器结合,应用于机器人行走控制中,提升机器人对不同环境的避障能力。通过在多种环境下进行避障路径跟踪,验证了该方法可以使机器人采用最优距离进行避障路径规划。但该方法还需要继续优化,如何在保证机器人避障路径规划性能的同时,缩短机器人避障路径规划的时间,是下一步工作的重点。