基于原子范数的无网格动目标参数估计
2024-01-05孙刚,张威,来燃,章涛
孙 刚,张 威,来 燃,章 涛
(中国民航大学天津市智能信号与图像处理重点实验室, 天津 300300)
0 引 言
机载阵列雷达一般处于下视工作状态,面临比地基雷达更为严重的地杂波问题,目标信号常常被淹没在强杂波背景中,而且由于平台运动,不同方位的杂波呈现出空时耦合特性,目标检测能力受到严重影响[1]。空时自适应处理(STAP)通过空域和时域二维联合自适应滤波,有效滤除机载雷达地杂波,实现动目标检测[2]。采用STAP技术抑制杂波并检测出运动目标后,需要对目标的空时二维参数进行估计[3],为后续目标定位、跟踪和识别提供有效的参数信息。传统的动目标参数估计方法主要是基于最大似然准则的二维参数搜索方法,这种方法的估计精度与搜索步长有关,运算量较大[4]。
近年来,稀疏恢复成为信号处理领域的研究热点[5-7]。稀疏恢复利用信号的稀疏先验,通过构造合适的信号稀疏模型,可从少量观测样本中高精度恢复出原始的稀疏信号,为机载阵列雷达目标参数估计提供新的研究方向[8]。基于稀疏恢复的动目标参数估计方法利用目标回波的空时功率谱在角度-多普勒域上的稀疏特性,通过合适的稀疏恢复方法对目标信号进行重构,进而估计出目标的空时二维参数。文献[4]使用基追踪(BP)算法对无杂波回波数据进行稀疏恢复,实现了运动目标参数估计。文献[8]采用正交匹配追踪(OMP)方法对雷达回波数据进行稀疏恢复,实现了目标多普勒频率的估计。
目前大多数基于稀疏恢复的动目标参数估计方法将目标参数空间对应的空时平面离散地划分为有限个网格点来构建空时导向矢量字典,当目标真实参数没有落在空时平面网格点上,即存在字典失配时,稀疏恢复性能下降[9-13]。为此,文献[10-12]提出基于失配校正模型的稀疏贝叶斯学习(OGSBI)方法。然而,上述针对字典失配问题的参数估计方法所使用的误差补偿模型基于一阶泰勒级数近似得到,当字典网格间隔较大时,模型近似误差增大。文献[14]提出利用全变分范数直接在连续参数空间上对稀疏信号进行精确重构,解决了稀疏恢复中的字典失配问题。文献[15]提出了基于原子范数最小化(ANM)的稀疏恢复方法,并将ANM等价转化为半正定规划(SDP)问题的求解,实现频谱稀疏信号的精确恢复和频率的超分辨率估计。文献[16-17]通过将观测数据矢量化处理以及对块Toeplitz矩阵的范德蒙德分解,提出了解决二维频率估计问题的ANM方法,为字典失配情况下的动目标参数估计提供了崭新的思路。本文针对参数稀疏恢复中的字典失配问题,利用目标回波的空时功率谱在角度-多普勒域的稀疏特性,提出了一种基于原子范数的无网格动目标参数估计方法。仿真结果表明,本文方法在字典失配情况下的参数估计性能优于已有基于字典网格的稀疏恢复参数估计方法。
1 信号模型
考虑采用均匀线阵的机载阵列雷达,如图1所示。阵列天线由M个阵元组成,阵元间距d=λ/2,λ为雷达工作波长。载机平台高度为H,且沿y轴运动,速度为vp,θ、φ分别为散射点P的俯仰角和方位角。雷达在一个相干处理间隔(CPI)内发射K个脉冲,脉冲重复频率为fr。假设待检测单元内最多存在一个目标,则该距离单元对应的空时快拍数据xpri∈MK×1可以写成
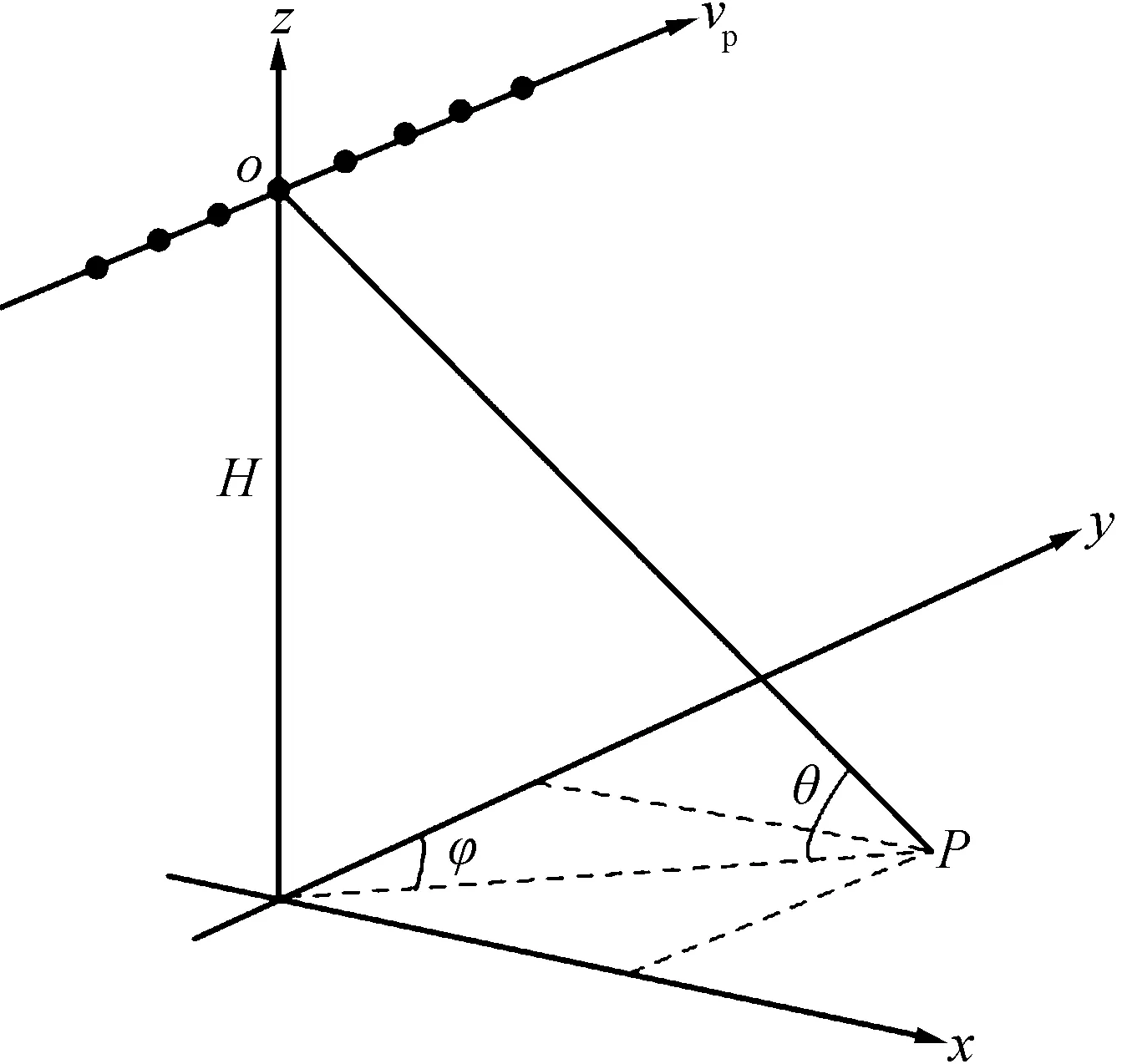
图1 机载雷达阵列几何结构
xpri=xt+xc+xn
(1)
式中:xt为目标分量;xc为杂波分量;xn为噪声分量;表示复数空间。xt可表示为
xt=γta(ft)=γtad(fd,t)⊗as(fs,t)
(2)
式中:γt表示目标回波复幅度;a(ft)∈MK×1,表示目标空时导向矢量;⊗表示Kronecker积。空域导向矢量as(fs,t)∈M×1定义为
as(fs,t)=[1,ej2πfs,t,…,ej2π(M-1)fs,t]T
(3)
时域导向矢量ad(fd,t)∈K×1定义为
ad(fd,t)=[1,ej2πfd,t,…,ej2π(K-1)fd,t]T
(4)
式中:fs,t和fd,t分别为目标的归一化空间频率和归一化多普勒频率。
当目标相对于雷达作匀速运动时,其归一化空间频率为
(5)
式中:φt、θt分别为目标的方位角和俯仰角。
归一化多普勒频率为
(6)
式中:vt为目标相对于雷达的径向速度。
2 基于固定离散字典模型的动目标参数估计及字典失配问题
2.1 基于固定离散字典模型的动目标参数估计
基于固定离散字典稀疏恢复的动目标参数估计方法将目标的空时二维参数——方位角和速度空间均匀离散地划分为Ns×Nd个网格点,对应的方位角参数空间和速度参数空间分别为{φ1,φ2,…,φNs}和{v1,v2,…,vNd},则离散化的空时导向矢量字典可以表示为
Φ=[a1,a2, …,aNsNd]=Vd(fd)⊗Vs(fs)
(7)
式中:Vs(fs)、Vd(fd)分别为空域导向矢量字典和时域导向矢量字典,即
Vs(fs)=
(8)
(9)
式(1)中空时快拍数据经过杂波抑制[16]后,包含待估参数的目标观测x的稀疏恢复模型可以表示为
x=Φξ+n
(10)
式中:ξ=[ξ1,ξ2,…,ξNsNd]T,为稀疏恢复支撑集向量,其每一个非零元素对应一个目标参数;n为噪声分量。根据稀疏恢复理论,支撑集向量ξ可以通过以下最优化方法获得。
(11)
式中:‖·‖0表示0范数;‖·‖2表示2范数;ε表示稀疏恢复允许误差。
通过稀疏恢复方法获得支撑集向量ξ后,目标的空时二维参数可以由ξ中绝对值最大的非零元素位置所对应的空时导向矢量获得。由于式(11)所示的优化问题是一个非确定性多项式难题(NP-hard),可以通过其松弛方法求解,如文献[4]使用BP方法进行目标参数稀疏恢复。
2.2 字典失配问题
基于固定离散字典稀疏恢复的动目标参数估计方法中,字典由均匀离散化的目标参数空间对应的空时导向矢量构成。如图2所示,当真实目标没有落在离散化的参数空间网格点上时,存在字典失配问题,严重影响稀疏恢复性能。网格化方法构造的字典不可避免地存在失配问题,即目标以较小概率位于网格点上。虽然缩小网格划分间隔可增大目标落入网格点的概率,但是过于密集的字典网格不仅会导致字典中相邻原子之间的相关性过强,稀疏恢复性能下降,而且字典的维数也会过大,运算量大大增加[18]。
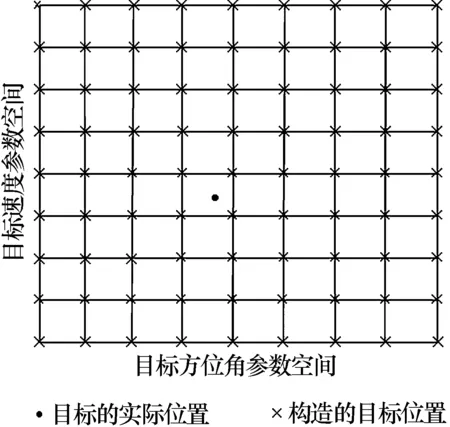
图2 字典失配示意图
3 基于原子范数的无网格动目标参数估计
针对基于固定离散字典稀疏恢复的动目标参数估计方法存在的字典失配问题,本文提出一种基于原子范数的无网格动目标参数估计方法。
目标信号子空间可以由其空时导向矢量张成,回波数据x的协方差矩阵R可以分解为
(12)
连续目标参数空间对应的空时导向矢量的集合可以表示为原子集合A,即
A{a(f)|a(f)∈MK×1,f∈[-0.5,0.5)×[-0.5,0.5)}=
{ad(fd)⊗as(fs),fd∈[-0.5,0.5),fs∈[-0.5,0.5)}
(13)
(14)
根据目标回波的空时功率谱在角度-多普勒域的稀疏特性以及低秩矩阵恢复理论,目标信号xt可以通过其原子范数最小化估计获得,即
(15)

(16)
式中:S(T)为K×K的块Toeplitz矩阵,即
(17)
式中:Ti(1-K≤i≤K-1)为M×M的Toeplitz矩阵,即
(18)
本文算法的具体操作步骤如下:
步骤1 利用子空间投影技术[20]对待检测单元数据进行杂波抑制,得到杂波抑制后的数据x;
4 仿真实验
为了验证本文方法的有效性,通过如下参数生成仿真数据。
天线阵为阵元数M=8的均匀线阵,阵元间距d=0.5λ,雷达工作波长λ=0.23 m,相干脉冲数K=8,脉冲重复频率fr=2 434.8 Hz,载机平台高度H=8 000 m,载机速度vp=140 m/s, 180个杂波单元在0°~180°均匀分布,杂噪比CNR=40 dB,雷达距离分辨率为37.5 m。匀速运动目标处于待检测单元内,位于方位角φt=90.01°处,目标相对于雷达的径向速度vt=98.99 m/s。实验对比了本文方法、文献[4]中的BP方法、文献[8]中的OMP方法和文献[12]中的OGSBI方法。OGSBI方法中最大迭代次数为2 000,超参数误差最大值设置为1×10-3,蒙特卡罗实验次数为500次。
图3对比了本文方法、OGSBI方法、BP方法和OMP方法在不同信噪比下的动目标空时二维频率估计结果。其中,图3a)为信噪比SNR=10 dB时的估计结果,图3b)为SNR=20 dB时的估计结果。BP方法和OMP方法中网格点数选取Ns=Nd=16,此时存在字典失配问题。从图3可以看出,当存在字典失配问题时,BP方法和OMP方法会存在失配造成的估计误差,OGSBI方法虽然不存在字典失配问题,但其估计结果误差仍相对较大,而本文方法在字典失配时仍能高精度估计参数。

图3 动目标空时二维频率估计结果比较
为了比较字典失配问题在不同字典间隔情况下对BP方法的参数估计性能的影响,BP方法中网格点数分别选取为Ns=Nd=256,Ns=Nd=64,Ns=Nd=16,三种网格划分方式均存在字典失配问题,且对应的字典间隔分别为Δφ=0.7°、Δv=1.1 m/s,Δφ=2.8°、Δv=4.4 m/s和Δφ=11.3°、Δv=17.5 m/s。图4为BP方法在不同字典间隔下的参数估计性能随信噪比变化曲线图。其中,图4a)为方位角估计均方根误差随信噪比变化对比图,图4b)为速度估计均方根误差随信噪比变化对比图。可以看出,字典失配问题越严重,BP方法的估计误差越大,而本文方法则不会随字典失配而增加估计误差。

图4 BP方法在不同字典间隔下的参数估计性能比较
为比较不同字典间隔情况下各方法的计算复杂度,将字典网格依次划分为16个、32个、64个、128个、256个,并统计各方法运行一次所需的平均时间,蒙特卡罗实验次数为200次,结果如表1所示。从表中可以看出,通过范数最小化进行求解的BP方法运行所需时间随网格密度的增大而迅速增加;采用最小二乘法进行迭代残差求解的OMP方法运行时间虽同样随网格密度增大而增加,但其计算复杂度较低,所需运行时间较短;各方法中精度最高的本文方法,计算复杂度及运行时间介于二者之间。

表1 不同字典间隔下各参数估计方法运行时间比较
图5为四种方法的动目标参数估计性能随信噪比的变化曲线图。其中,图5a)为目标方位角估计均方根误差随信噪比变化对比图,图5b)为目标速度估计均方根误差随信噪比变化对比图。从仿真结果来看,图5进一步体现了本文方法相比OGSBI方法、BP方法和OMP方法在估计精度上的优势,本文方法虽然在信噪比较低时,方位角和速度估计均方根误差较大,但随着信噪比的增大,估计性能逐渐变好。当信噪比接近10 dB时,估计性能接近对应的克拉美罗界(CRB)理论曲线,而BP方法和OMP方法由于存在字典失配问题,参数估计性能并没有随着信噪比的增大而提高,OGSBI方法由于受一阶泰勒近似估计误差影响,估计精度有限。
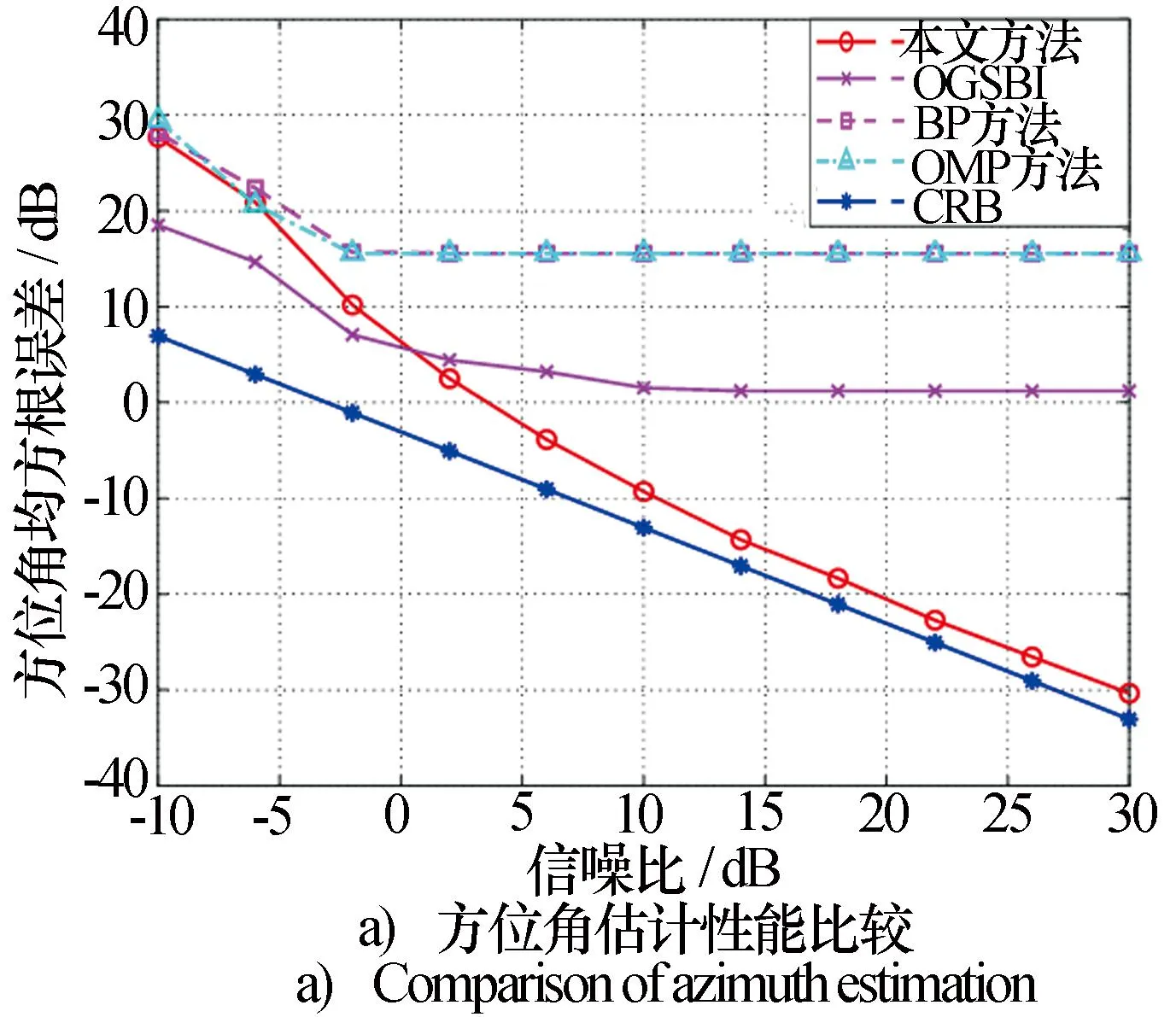
图5 动目标参数估计性能随信噪比变化曲线图
图6为当雷达相干脉冲数(K=16)固定,阵元数分别为8、12和16时,本文方法得到的动目标参数估计性能随信噪比的变化曲线图。其中,图6a)为目标方位角估计均方根误差随信噪比变化对比图,图6b)为目标速度估计均方根误差随信噪比变化对比图。由仿真结果可知,雷达阵元数越多,本文方法得到的动目标参数估计精度越高。
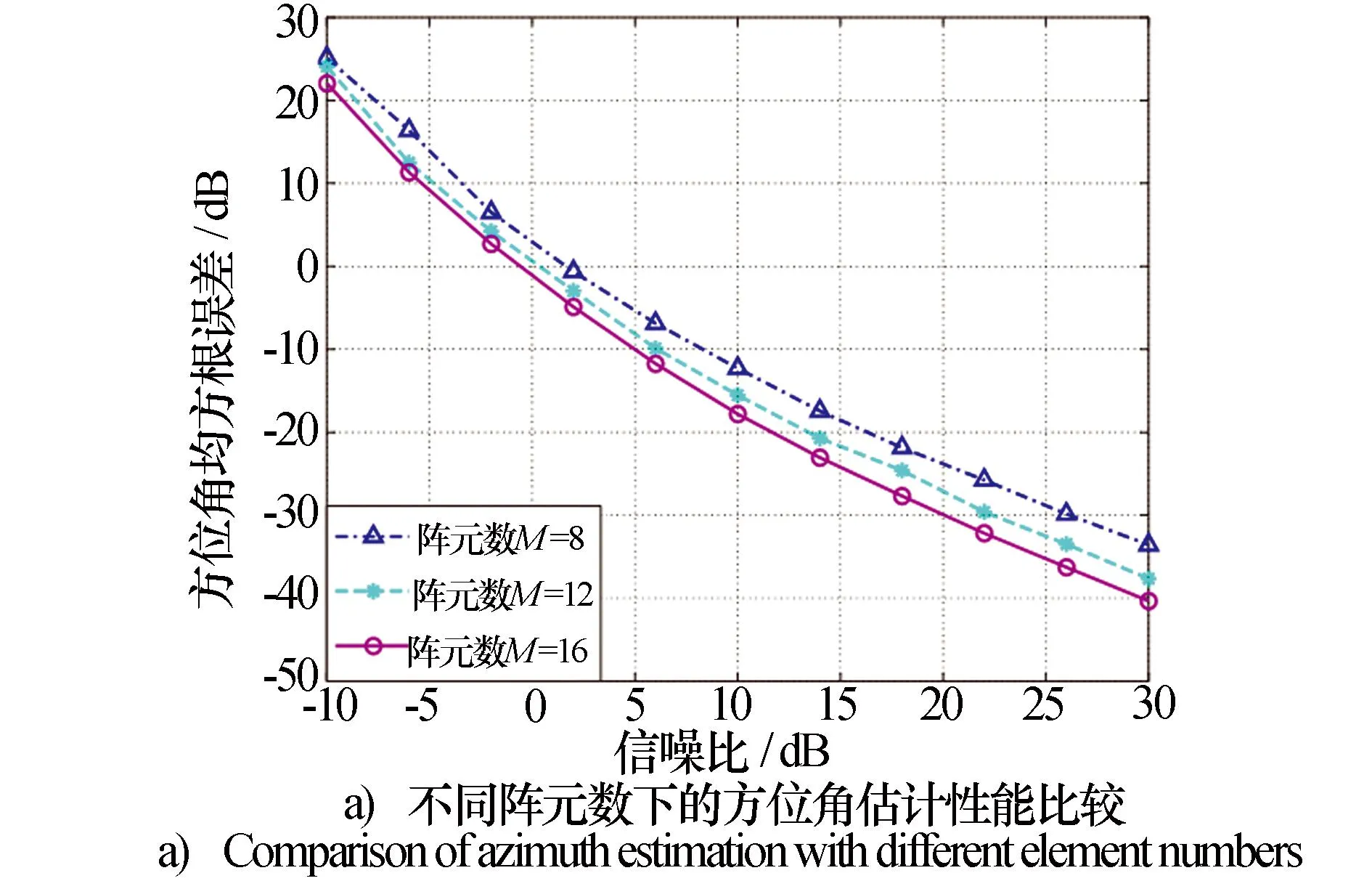
图6 不同阵元数下的动目标参数估计性能比较(K=16)
图7为雷达阵元数(M=8)固定,相干处理脉冲数分别为8、12和16时,本文方法得到的动目标参数估计性能随信噪比的变化曲线图。其中,图7a)为目标方位角估计均方根误差随信噪比变化对比图,图7b)为目标速度估计均方根误差随信噪比变化对比图。由仿真结果可知,雷达相干脉冲数越多,本文方法得到的动目标参数估计精度越高。

图7 不同脉冲数下的动目标参数估计性能比较(M=8)
5 结束语
本文针对参数稀疏恢复在字典失配情况下的空时自适应处理中动目标参数估计问题,提出了一种基于原子范数的无网格动目标参数估计方法。该方法利用目标回波在角度-多普勒域的稀疏特性,根据低秩矩阵恢复理论实现目标方位角和速度的稀疏恢复,避免了固定字典网格的稀疏恢复参数估计方法中的字典失配问题,有效提高了动目标参数的估计性能。本文只考虑待检测单元内最多存在一个目标的情况,针对多目标场景下的参数估计方法是下一步研究的重点。