基于模糊逻辑的移动机器人导航共享控制研究
2024-01-04李玉菡游昌欣
李玉菡,韩 晶,任 兵,游昌欣
(中北大学, 太原 030000)
0 引言
随着计算机和互联网技术的快速发展,移动机器人在军事[1]、医疗[2-3]以及对人类有害环境[4]等领域的应用越来越广泛。尽管移动机器人在许多领域取得了显著进展,但在复杂未知的非结构化环境中完全自主的运转仍然难以实现。例如,移动机器人在遇到突发情况、环境变化以及密集障碍物时易出现徘徊抖动现象,甚至停滞[5]。
共享控制是指操作者、自主控制系统之间进行协调,共同对远端的移动机器人进行控制的策略[6]。共享控制现已广泛应用于远程医疗[7]、智能轮椅控制[8]、空间操作[9]、辅助驾驶[10]以及无人机控制[11]等多个领域。根据操作者和机器人的控制权分配方式, 可以分为切换控制权、固定控制权重以及动态控制权重的共享控制。
切换控制权的共享控制是指根据切换条件轮流控制机器人运动。Xu Yang等[12]用基于运动图像的BCI和计算机视觉指导,通过共享控制来实现对灵巧机械臂的控制,但在每一时刻移动机器人仅由操作者或移动机器人单独控制。固定控制权重的共享控制在不同场景下,通过进行多次实验或仿真从而确定最优控制比例。张亚坤等[13]面对环月轨道遥操作交会对接最终平移段的轨道控制上的问题时提出共享控制,结合操纵人员的手动控制操作特性, 推导共享控制的权重系数,形成共享控制策略。这种方法在不同场景下需要多次进行实验确定权重系数,不具有普遍性。动态控制权重的共享控制是在不同条件下动态调整操作者和机器之间的控制权重大小,并根据权重比例函数将两者指令融合实现共享控制。高翔等[14]通过将安全性、平滑度、方向性3个影响因素线性加权组合,以实现动态调整共享控制的权重,然而这种动态调节权重的方法仅通过简单的线性加权方式。
因此,本研究中将遥操作技术和机器人自主控制技术相结合,提出基于模糊逻辑的共享控制方法来动态调整共享控制权重,以避障系数和安全系数为输入,共享控制权重为输出,充分发挥操作者的认知决策能力和机器人的精细控制能力,使移动机器人根据与周围障碍物的距离和自身的速度信息,动态调节操作者指令和自主控制之间的权重 ,从而提高移动机器人在应对突发状况和复杂环境下导航的稳定性和精确度。
1 基于模糊逻辑的共享控制系统
为了提高移动机器人在复杂环境条件下的导航能力,在移动机器人具有自主导航的情况下,加入操作者的决策能力。共享控制器接收操作者控制指令和自主控制指令,实现对机器人系统的控制,其关键在于合理分配两者之间的控制权重。模糊控制器通过机器人状态信息和环境信息来动态调节权重比例,从而更好地适应环境,提高导航效率。本文中提出的基于模糊逻辑的共享控制系统如图1所示。
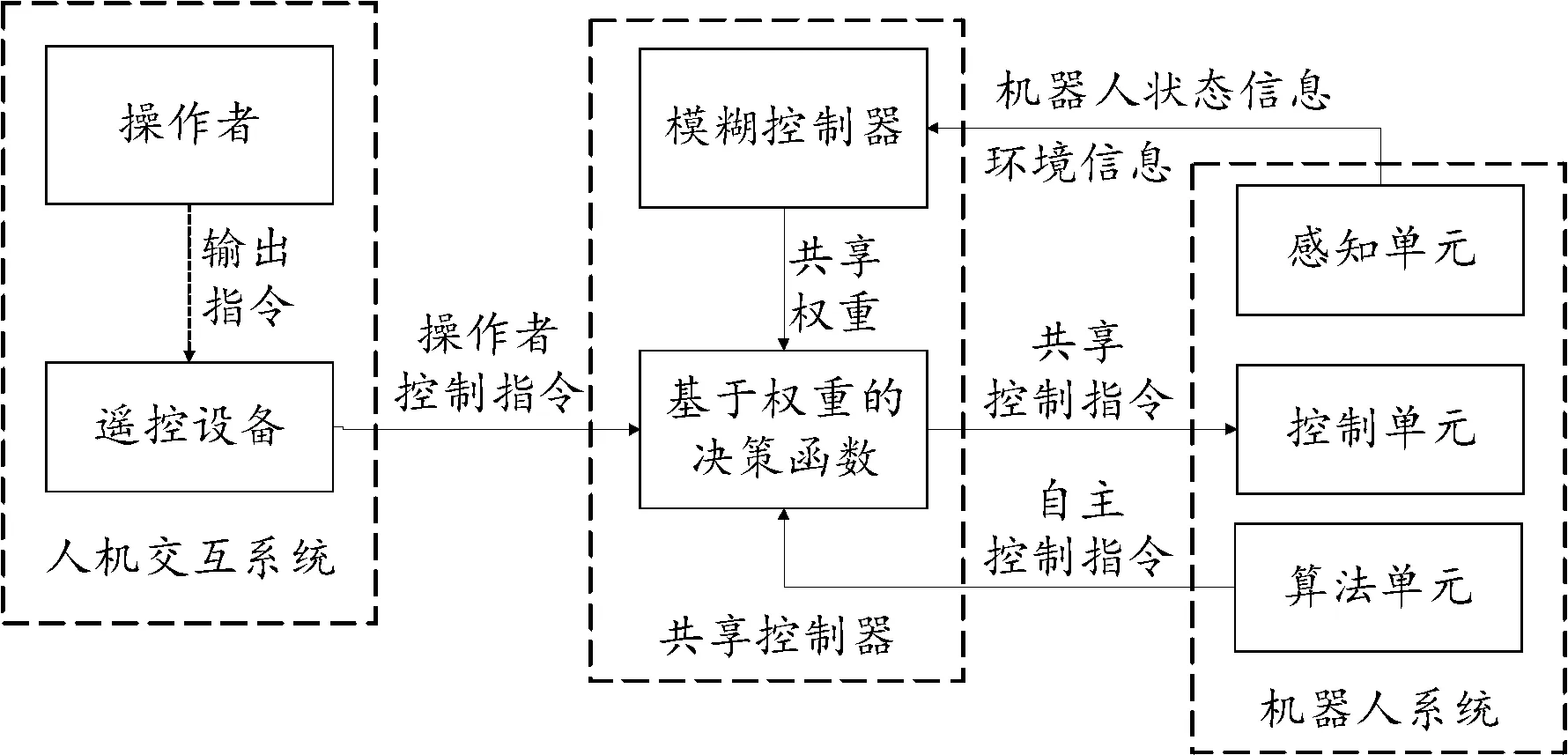
图1 基于模糊逻辑的共享控制系统框图
基于模糊逻辑的共享控制系统主要包含人机交互系统、机器人系统和共享控制器3个部分。
人机交互系统:操作者使用遥控设备对移动机器人遥操作,例如前进、后退、旋转等具体的运动行为,对移动机器人进行远程控制和干预。
机器人系统:移动机器人会根据地图信息和已有的实时激光雷达传感器信息建立起全局地图和局部地图,并设计出从起始点到目标点的全局路径和最优局部路径。路径信息会以线速度和角速度的形式传输给控制器,从而实现机器人的自主导航功能,得到自主控制指令。
共享控制器:将环境信息和移动机器人的状态信息输入模糊控制器,根据建立的模糊规则,输出共享控制权重。最后基于权重的决策函数[15]接收操作者控制指令、自主控制指令及共享权重,输出对移动机器人的共享控制指令。基于权重的决策函数为:
U(v,ω)=ηUh(v,ω)+(1-η)Ur(v,ω)
(1)
式(1)中:U(v,ω)为共享控制器最终发送给机器人的速度信息;Uh(v,ω)为操作者控制指令的速度信息;Ur(v,ω)为机器人自主控制指令的速度信息;η为共享控制权重,根据η的值可以将共享控制分为3个阶段:
自主控制阶段(η=0):移动机器人根据传感器获取的数据执行任务,操作者不需要直接参与任务的执行。
遥操作阶段(η=1):移动机器人由人工操作者直接驱动,操作者可以通过遥控器对机器人进行远程控制和干预。
共享控制阶段(η∈(0,1)):操作者和机器人共同参与任务的执行,通过共享控制系数来协调各自的动作,以实现更高效、准确的任务完成。
2 模糊控制器设计
本研究中采用模糊逻辑方法来合理分配操作者和机器人之间的控制权重,以避障系数和安全系数作为输入,共享控制权重作为输出。首先,选取合适的输入、输出变量;然后,将输入的控制变量进行模糊化处理,转化为模糊量;再根据实际情况建立模糊规则,根据建立的模糊规则进行模糊化推理,得到输出控制变量的模糊量;最后将输出的模糊量进行解模糊处理,转换为精确的值并进行输出。
2.1 基本原理
为能同时考虑到周围的环境因素和移动机器人的运动信息,设计了两输入单输出的二维模糊控制器,如图2所示,以避障系数和安全系数为输入,共享控制系数为输出。
避障系数:取决于移动机器人距离最近障碍物的距离信息,表示移动机器人避障可靠性,表达式为:
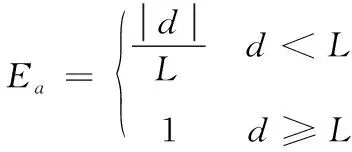
(2)
式(2)中:d为激光雷达传感器获得的机器人到障碍物的最短距离;L为激光雷达传感器的可监测距离。如果移动机器人与障碍物之间的距离在传感器可检测范围之内,且机器人与障碍物之间的距离越来越小时,避障系数会减小,移动机器人自主避障能力逐渐降低。如果障碍物在传感器可检测范围之外,移动机器人自主避障可靠度很高,避障系数饱和到1。
安全系数[16]:表示移动机器人运动的安全性和稳定性,其表达式为:

(3)
式(3)中:p为常量系数,由设计者根据应用场景和实际情况而定;ω为移动机器人的角速度;ωm为移动机器人的最大角速度。当机器人角速度频繁变化且较高时,安全系数较低,表明机器人可能出现突发情况或者因传感器无法正确识别和算法不足而出现徘徊抖动现象。当移动机器人角速度较低时,此时机器人正常运动,安全系数较高。
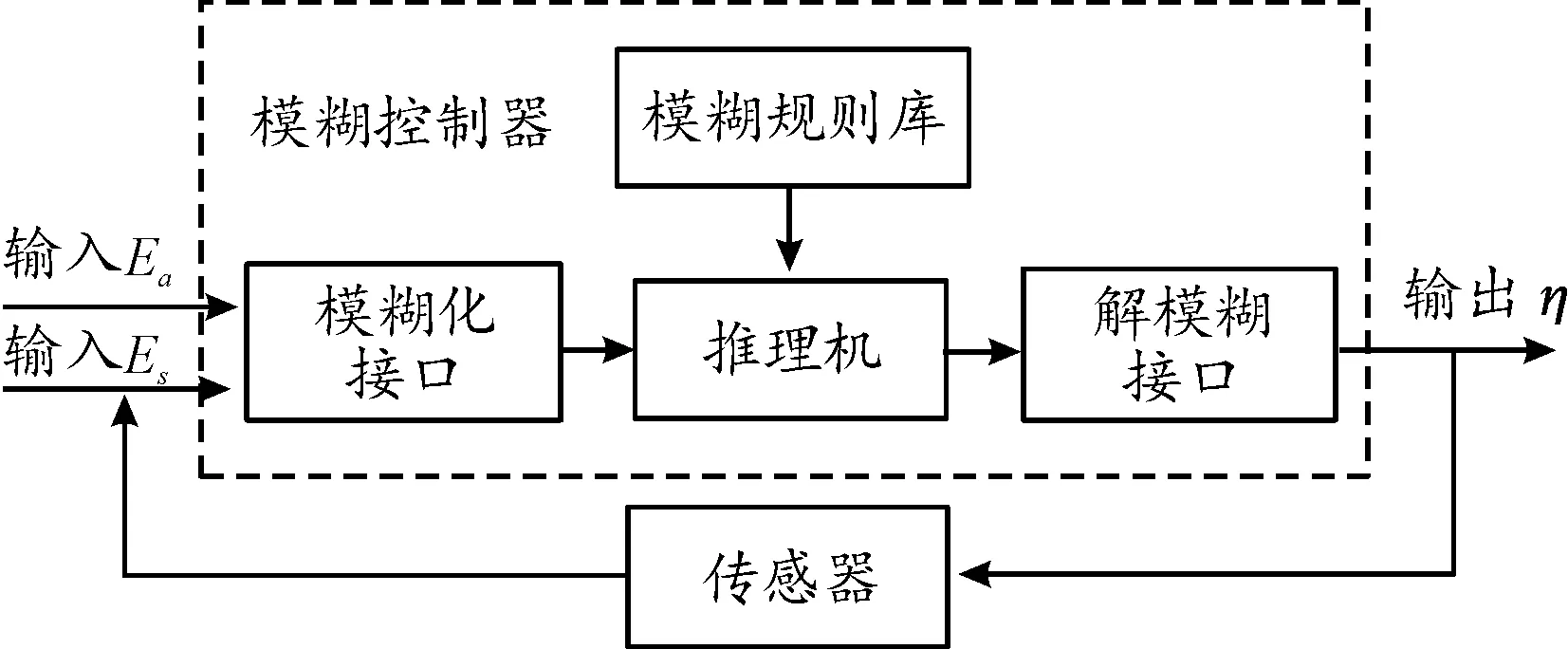
图2 模糊控制器组成框图
2.2 模糊化和隶属函数的确定
将输入控制变量进行模糊化处理转化为模糊量。输入变量避障系数Ea、安全系数Es和输出变量共享控制权重η的变化区间为[0,1],将输入、输出变量变换到模糊论域为{0,0.25,0.5,0.75,1}。根据避障系数、安全系数和共享控制权重的大小将其划分为{VS,S,M,B,VB}5个模糊集,并定义为{很小,小,中,大,很大}。
常用的隶属度函数有高斯型、S形、梯形、三角形和正态分布形等。隶属度函数一般在整个范围内均匀分布, 且隶属度函数之间的重叠区域通常为 20%~55%,来提高鲁棒性。
为了使结果更加符合实际情况,且三角形隶属函数计算简单,可以适用于多种不同类型的模糊集合。因此结合经验并经过分析和推理,对于输入变量避障系数Ea、安全系数Es和输出变量共享控制权重η的隶属度函数取三角形隶属度函数,隶属度函数图如图3所示。
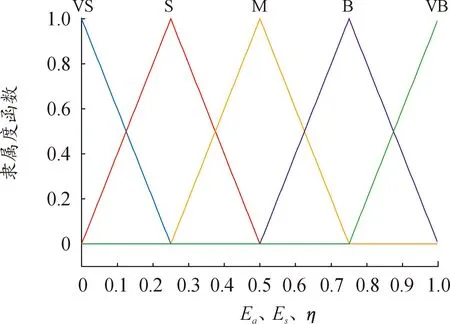
图3 输入、输出变量的隶属度函数图
2.3 模糊规则的建立
当机器人与障碍物之间的距离d大于激光雷达传感器可监测距离L时,避障系数Ea恒等于1,意味着机器人与障碍物相距很远,完全可以依靠机器人自主控制规划路径,实现自主导航。此时应减小共享控制权重,使机器人自主控制在共享控制中占据主导地位。
当机器人与障碍物之间的距离d小于激光雷达传感器可监测距离L时,随着机器人对障碍物的靠近,避障系数Ea逐渐减小,有可能因智能控制算法陷入局部极小点或者地图的不精准映射导致机器人出现徘徊抖动、停滞现象。此时应增加共享控制权重,使操作者控制在共享控制中占据主导地位,可以直接调整机器人的位置,使其重新规划一条新的路径。
当机器人的角速度ω较高时,安全系数Es较低,表明可能因突发情况或者传感器和算法不足,使机器人一直根据周围环境信息进行局部路径规划,从而出现徘徊抖动现象,此时应增大操作者控制的占比权重,提高共享控制权重。
当机器人的角速度ω较低时,安全系数Es较高,意味着移动机器人平稳、安全地行驶,不需要操作者过多介入,应降低操作者控制的占比权重,减小共享控制权重。
根据以上条件,建立的共享控制权重的模糊规则表如表1所示。

表1 共享控制权重η的模糊规则
根据建立的模糊规则表进行模糊推理。常用的模糊推理方法为Mamdani 法和Takagi-Sugeno法。Mamdani推理方法经模糊规则推理后得到的输出是离散的模糊集合,适用于控制系统中的推理。Takagi-Sugeno推理方法的输出量是输入量的线性函数,推理结果是清晰值,适用于专家系统中的知识表示和推理。因此,本文中根据建立的模糊规则表,使用Mamdani法进行模糊推理。
2.4 去模糊化
去模糊化是模糊推理机中重要的一步,也称解模糊化。去模糊化的方法有很多种,最常用的有最大隶属度法、重心法和加权平均法 。重心法简单且计算速度快,适用于实时控制和处理非线性系统推理问题。因此使用重心法对模糊推理的模糊量进行去模糊化处理,如式(4)所示,将其转化为精确值输出。
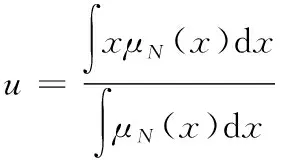
(4)
式(4)中:u为输出精确值;μN(x)为隶属度函数;N为模糊合集;x为输出量。
通过模糊逻辑控制工具建立模糊控制系统,得到的模糊控制器输入输出曲面如图4所示。在输入变量避障系数Ea、安全系数Es的不同输入情况下,通过共享控制权重η的变化情况反映模糊控制器对不同输入的响应情况,很好地表征了模糊控制器的输入输出关系。

图4 模糊控制器输入输出曲面
3 导航实验结果与分析
3.1 实验环境设置
为了验证基于模糊逻辑共享控制方法的合理性和有效性,搭建了地面移动机器人实验场景,如图5所示。该场景大小为3.46 m×3.46 m,移动机器人大小为0.18 m×0.12 m×0.13 m,实验场景包含密集障碍物、狭窄通道以及突发情况等。蓝色虚线处为密集障碍物,障碍物间距离为0.35~0.5 m;黑色虚线处为狭窄通道,该3个狭窄通道尺寸均为0.3 m。在地图构建阶段,该实验场景红色框线中没有障碍物;在移动机器人实际运动过程中,在红色框线中放入障碍物,以模拟突发情况。
移动机器人遥操作控制端如图6所示。移动机器人搭载激光雷达传感器和ROS(robot operating system)机器人操作系统,通过无线局域网和SSH(secure shell)远程登陆移动机器人,操作者在Ubuntu系统Rviz中观看移动机器人传达回来的雷达地图,可通过遥控设备控制远端移动机器人。
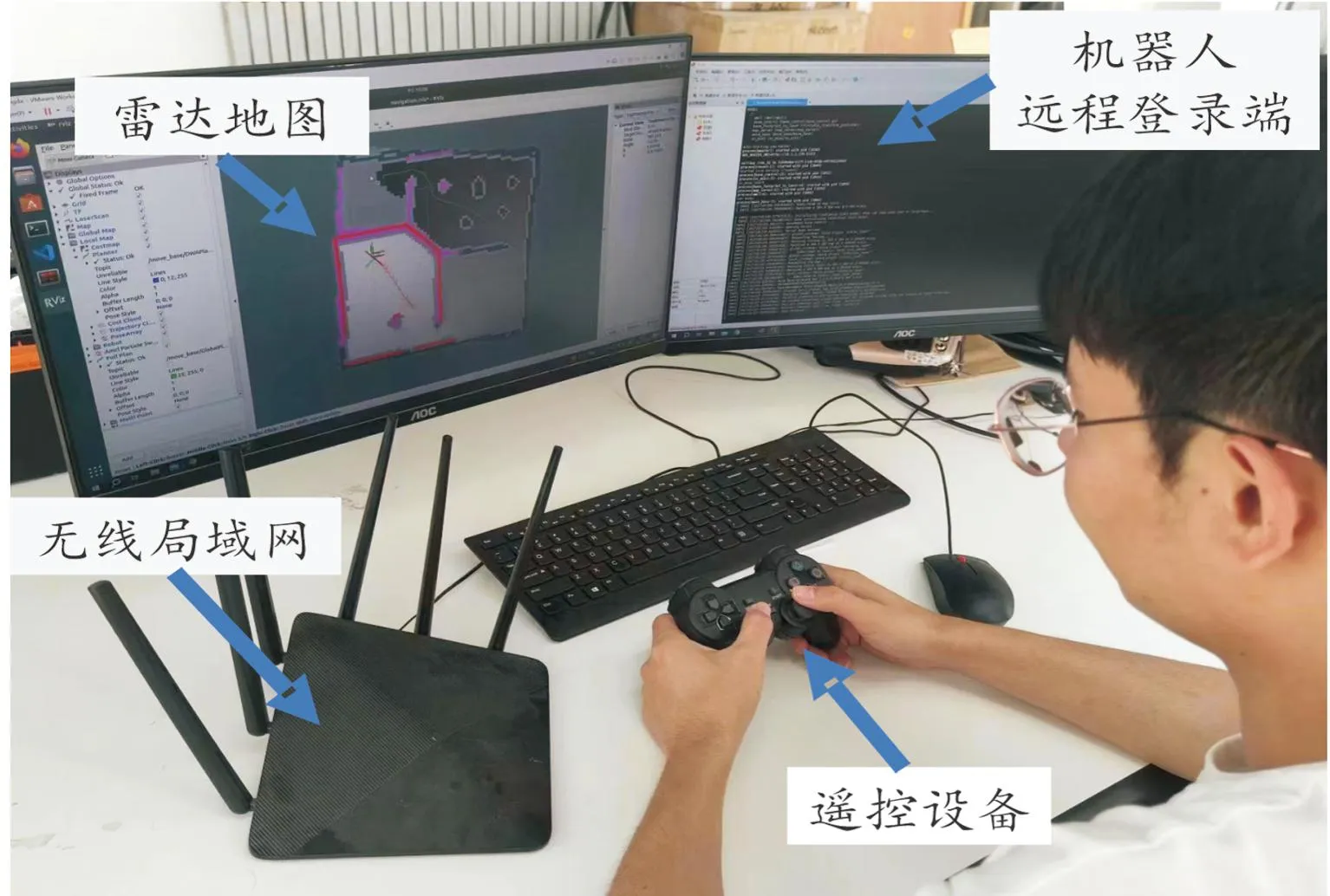
图6 移动机器人遥操作控制端
遥操作控制时,移动机器人仅由操作者根据传达回来的雷达地图使用遥控设备直接远端控制;移动机器人自主导航控制时,自主导航系统会根据地图信息和已有的实时的激光雷达传感器信息规划路径,路径信息会以速度和角速度的形式传输给控制器,从而实现自主导航;基于模糊逻辑共享控制移动机器人时,模糊控制器接收导航过程中机器人的速度信息和与障碍物的距离信息,并输出共享控制权重给基于权重的决策函数,基于权重的决策函数接收操作者控制指令和机器人自主控制指令并根据共享控制权重输出共享控制指令发送给移动机器人。实验架构图如图7所示。
设置起点和终点,使移动机器人在基于遥操作、基于自主控制和基于模糊逻辑的共享控制下避开障碍物从起点运动到终点,最终从移动机器人轨迹图、速度变化、运行时间和轨迹长度对比实验结果,进行分析验证。
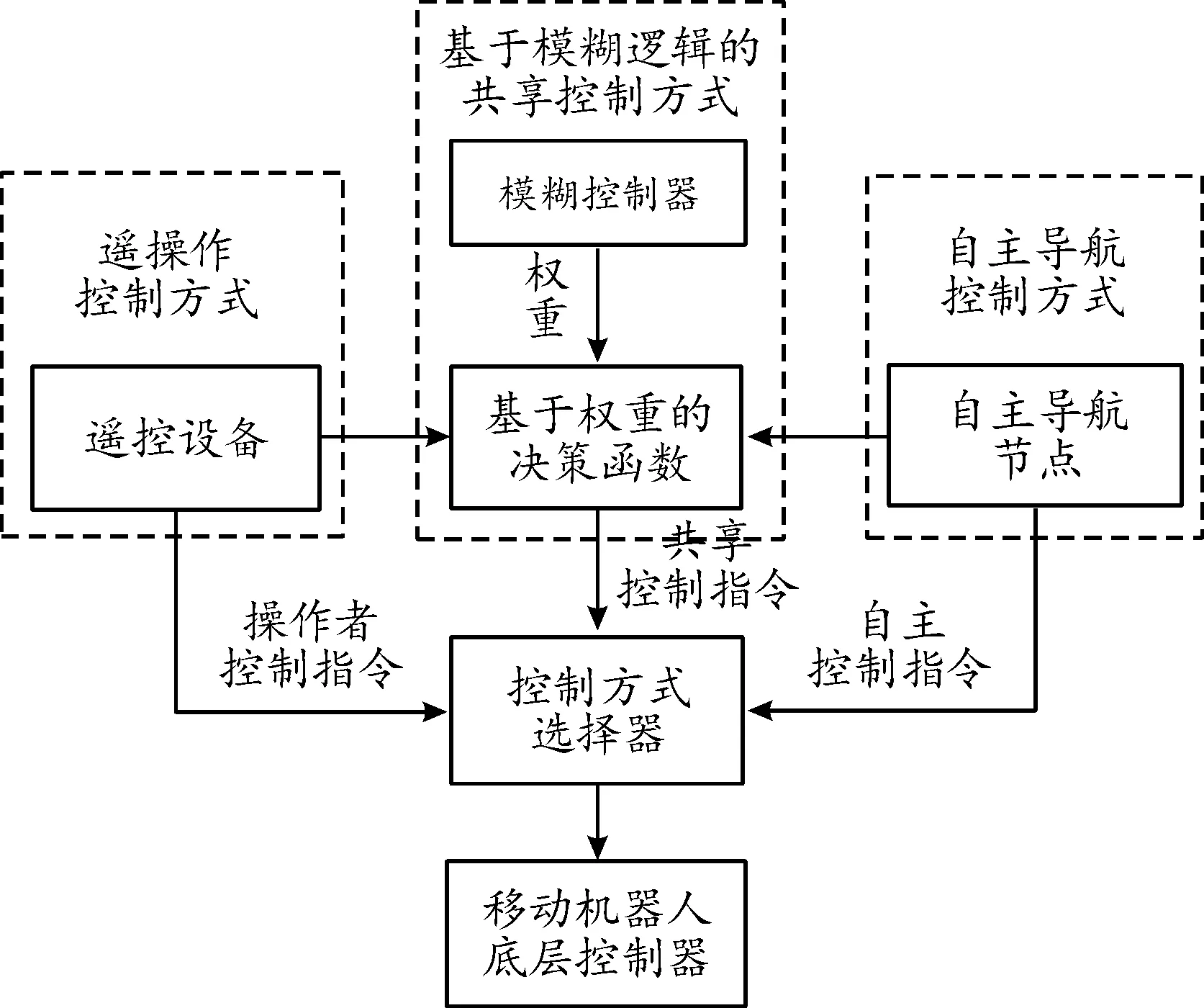
图7 实验架构图
3.2 轨迹图分析
在ROS中, odom(odometry)话题是一个基于里程计的传感器数据话题,包含了移动机器人的位置信息。通过订阅odom话题,可以实时得到移动机器人的坐标变化。移动机器人通过遥操作、自主控制和模糊逻辑共享控制从起点导航到终点的轨迹图如图8所示。
基于遥操作方法的轨迹长度为7.851 4 m,其轨迹大多为直线,并且轨迹波动较大;基于自主控制方法的轨迹长度为10.087 4 m,面对突发情况和通过狭窄通道、密集障碍物时,在其中红线方框处明显出现徘徊抖动现象,故其轨迹长度最长;基于模糊逻辑共享控制方法的轨迹长度为7.651 4 m,与基于自主控制方法相比,明显轨迹平滑度更高,抖动更少,路径更短。与之后的速度分析相对应,线速度和角速度波动频率低,体现在导航过程中就是轨迹曲线更加平滑。
3.3 速度分析
在ROS中,cmd_vel(control velocity)话题是一个用于发布速度命令的话题,移动机器人底盘接收到来自cmd_vel话题的速度消息,并将其转换为相应的控制信号发送给电机或伺服系统进行控制。通过订阅cmd_vel话题,可以实时得到移动机器人的线速度和角速度信息。移动机器人通过遥操作、自主控制和模糊逻辑共享控制从起点导航到终点的速度信息如图9所示。其中速度变化图中红色曲线为角速度变化曲线,角速度控制机器人的方向,黑色曲线为线速度变化曲线,线速度控制机器人的速度大小。

图8 移动机器人导航轨迹图
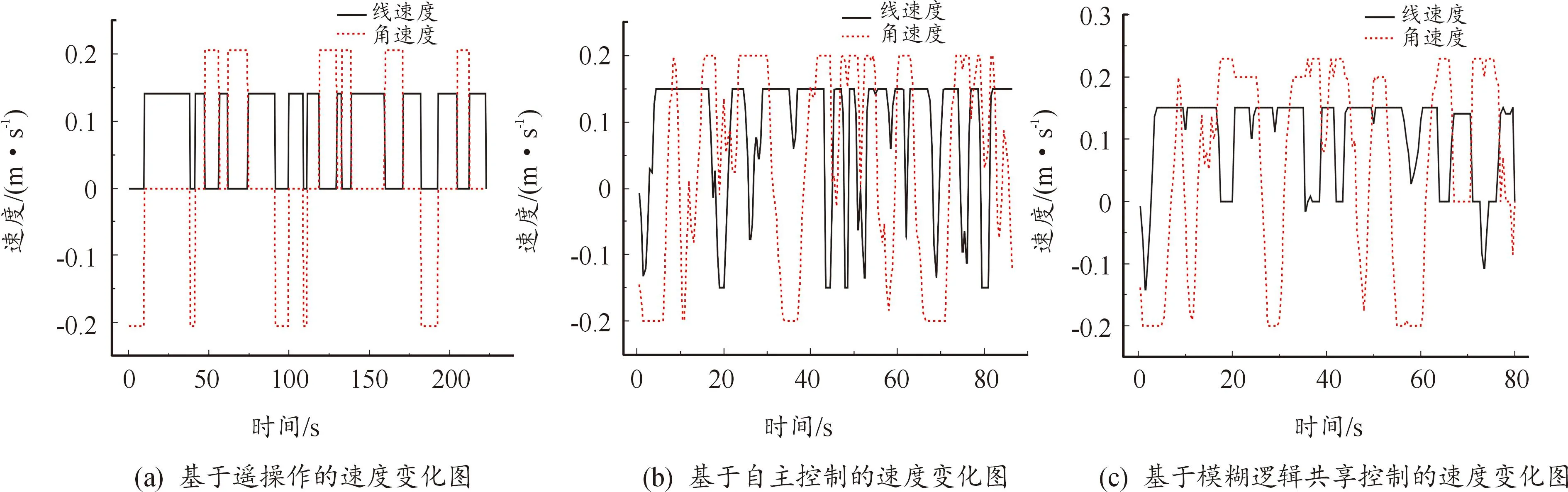
图9 移动机器人导航速度变化图
遥操作时,仅由操作者的意图控制,其线速度和角速度变化主要集中在遇到突发情况以及通过狭窄通道和密集障碍物时,且其线速度和角速度在某段时间保持不变,对应之前的轨迹大多为直线,运行时间为223 s,耗时最长;基于自主控制的线速度与角速度波动变化频率较高,与轨迹图分析相对应,存在较多调整转向、前进后退的动作,运行时间为87 s。基于模糊逻辑的共享控制线速度和角速度平稳输出,无频繁变化,轨迹图整体曲线也较为平滑,其共享控制权重在面对突发情况和通过狭窄通道和密集障碍物时能达到 0.6~0.7左右,运行时间为80 s,使移动机器人耗时最短且安全平稳地导航到达终点。
3.4 共享控制权重分析
通过模糊共享控制方法使移动机器人从起点导航到终点过程中,模糊控制器接收避障系数和安全系数,根据建立的模糊规则推理得到的共享控制权重如图10所示。初始障碍物距离移动机器人较远,机器人处于安全状态,不会发生徘徊抖动现象,不需要操作者参与,故共享控制系数较低,操作者参与较少。随着移动机器人的运动,移动机器人相继通过狭窄通道和密集障碍物,并在中途偶遇突发情况,出现一个之前创建地图时未出现的一个障碍物。在这些情况下,移动机器人易出现徘徊抖动甚至停滞现象,故共享控制系数较高,增加操作者的控制权重,以保证移动机器人可以顺利通过。
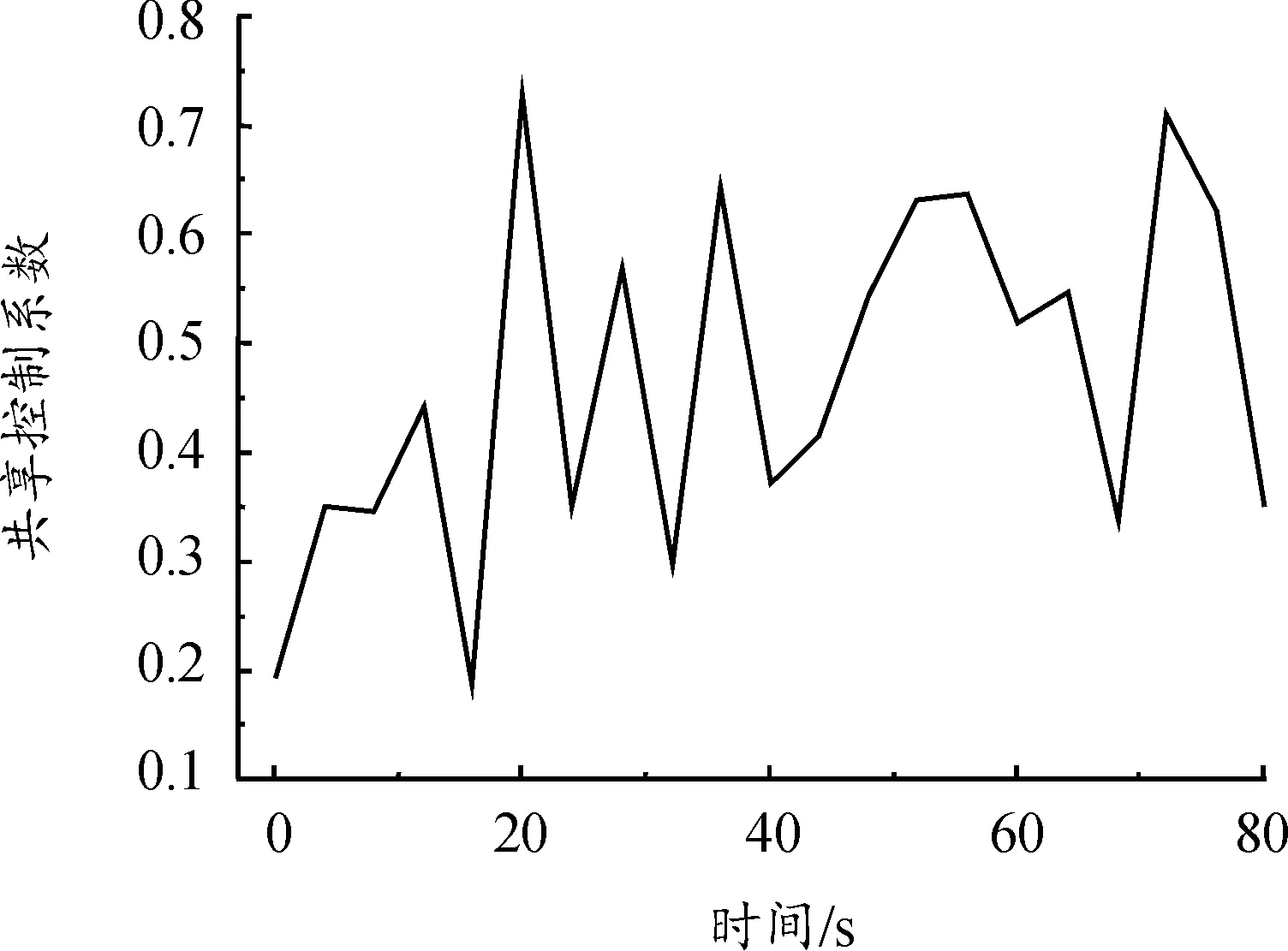
图10 基于模糊逻辑的共享控制权重变化图
综上所述,从移动机器人轨迹图、速度变化、运行时间和轨迹长度的实验结果方面,验证了基于模糊逻辑共享控制方法的有效性和平稳性,同时保证了移动机器人导航具有更高的控制精度和安全性。
4 结论
针对非结构化环境、障碍物密集和突发情况,移动机器人自主导航时会出现徘徊抖动甚至停留现象的问题,在移动机器人具有自主导航能力的基础上,融入操作者的决策与控制能力,提出了一种基于模糊逻辑的共享控制方法,以避障系数和安全系数为输入,共享控制权重为输出,动态调整操作者和移动机器人的控制权重。实验结果表明:基于模糊逻辑的共享控制方法,可以在较短时间以更优路径导航到目标点,具有较好的控制精度、平稳性和交互性。