冰雪条件下面向网联混行交通流的交叉口配时优化
2024-01-02米日扎提艾克拜尔李兴佳潘玉叶陈绍元
米日扎提·艾克拜尔,王 琪,李兴佳,魏 遥,潘玉叶,陈绍元
(吉林大学交通学院,吉林 长春 130000)
0 引 言
在现代交通环境下,网联车因具有车头时距短,启动时间短,提前预知道路信息情况等多种优势正在被逐步推广使用;而在冰雪条件下,道路摩擦系数、温度等多种环境因素和驾驶人行车视距增加、反应时间变长、制动距离增加等驾驶因素影响下,交叉口通行能力下降,尤其在相位变换期间,车辆之间冲突点增多,导致交叉口拥堵,交叉口交通事故频发,存在重大安全隐患。而对于在网联与非网联混合交通流的冰雪条件下的信号交叉口,采取常态下的交叉口配时方案,没有考虑网联车交通特性和冰雪条件对交通影响,导致交叉口通行效率下降。
根据有关研究表明,在智能网联汽车普及的初级阶段,交通效率提升10%,油耗与排放分别降低5%;在智能网联汽车普及的最后阶段,提升交通效率30%以上。单从通行能力来看,正常天气同冰雪天气和冰冻天气相比,气候状况每变化一个级别,通行能力下降5%~15%不等[1]。根据秦严严等[2]关于车头时距和混合交通流的稳定性研究中,得到当CAV(自动驾驶汽车)占比超过50%时车头时距低于1.5 s。杨达等[3]通过跟驰模型以及换道时间模型的方法为智能网联汽车通过信号交叉口的驾驶行为建立决策框架,显著提高了网联车对通行条件判断的准确性。蒋阳升等[4]利用全速度差模型和协同自适应巡航控制模型得出结论:随着占比率的增加安全性能提高,交通安全风险降低。
因此,探究冰雪条件下网联与非网联混合交通流的信号交叉口优化配时方案极为重要。从网联车和冰雪条件对信号交叉口交通参数影响开始分析,对信号交叉口配时参数进行实时调整、优化。根据网联车自身驾驶特性和网联车信息的时效性,探索不同冰雪条件下信号配时动态优化最优解,提高信号交叉口通行能力,降低车辆延误,解决冰雪条件下交叉口的交通问题。
1 网联条件与冰雪条件对信号交叉口运行影响分析
1.1 网联车对信号交叉口影响分析
网联车辆对信号交叉口的影响主要体现在网联车自身的驾驶行为与非网联车不同和网联车实时传送信息的时效性更强两个方面。
一方面,网联车分为自动驾驶车辆和人工驾驶车辆,自动驾驶车辆因为其自身驾驶行为与传统汽车不同,通过车车、车路的信息收集与处理,网联车在停车线起步,跟驰行驶,交叉口同行等诸多方面带来更短的延误,原有的信号配时方案并没有考虑到车头时距变化,启动损失时间减少等诸多变化。因此Yang等[5]在网联车与非网联车混行的交通流中对如何优化传统信号交叉口信号配时这一问题提出,最小化车辆延误时间和停车次数是优化的重点。
另一方面传统信号交叉口信号配时的更改主要依据历年交通参数和检测器对交通流检测,对交叉口进行实时优化,这些单一的交通量获取方式使得获取的信息时效性不佳,从而导致当前交叉口的信号配时不能满足实时的交通流量需求。而网联车与路网的信息实时传递,从中可以推测当前网联车与非网联车混行交通流的车流速度与位置信息,Feng等[6]对标准八相位的信号控制交叉口进行优化时充分利用了网联车车辆轨迹信息,估算车队长度和车队速度,以此来对该交叉口相位的次序和时长进行优化。
以传统六车道两相位交叉口为例,对混联车流进行简化并按照网联车占比来对其进行分析,进而计算交叉口的延误和信号的合理配时。查阅参考文献[2]时发现,自动驾驶车辆不同占比的混合车流期望车头时距、启动损失时间、消散波时间明显不同,随着自动驾驶车辆占比增加,消散波时间明显缩短,车辆平均速度明显增加。同时网联车实时传送数据,将当前交通量、车辆运行速度、车队位置信息进行传输,当该交叉口饱和度趋近于1时,引导未进入该交叉口的车辆选择其他交叉口通行,以此来降低该交叉口交通量。
因此接下来对网联混行交通流环境的分析,将以自动驾驶汽车占混行交通车流比例与延误的关系定量分析为重点,在饱和度小于1的情况下对该交叉口配时进行优化调整。
(1)网联车对头车启动时间影响分析
网联自动驾驶汽车、网联人工驾驶车辆、人工驾驶传统车辆分别作为头车启动时间都大为不同,网联自动驾驶汽车可以在最短的时间内起车,网联人工驾驶车辆和人工驾驶传统车辆起车时间大致相同。
(1)
通过杨晓光等[7]的研究,可以得到人工驾驶汽车平均启动损失时间(公交车视为大型人工驾驶汽车)如表1所示。
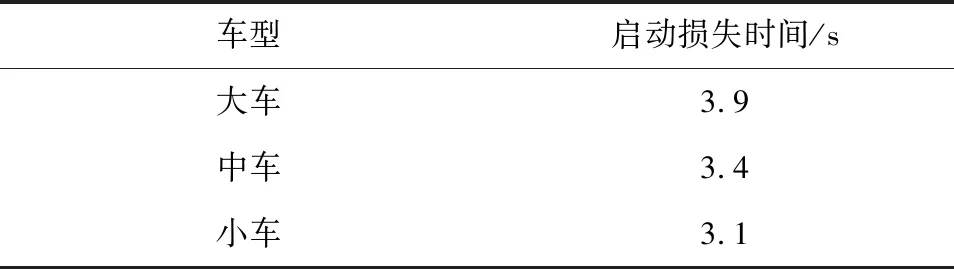
表1 人工驾驶车启动时间表
(2)

(2)网联车对期望车头时距影响分析
网联车的驾驶行为根据目前的混行交通划分可以分为以下四种类型,网联自动驾驶车辆跟随网联自动驾驶车辆行驶η11,网联自动驾驶车辆跟随非自动驾驶车辆行驶η21,非自动驾驶车辆跟随网联自动驾驶车辆行驶η12,非自动驾驶车辆跟随非自动驾驶车辆行驶η22,其中非自动驾驶车辆分为网联人工驾驶车辆和非网联人工驾驶车辆两种不同的车型,如图1所示。
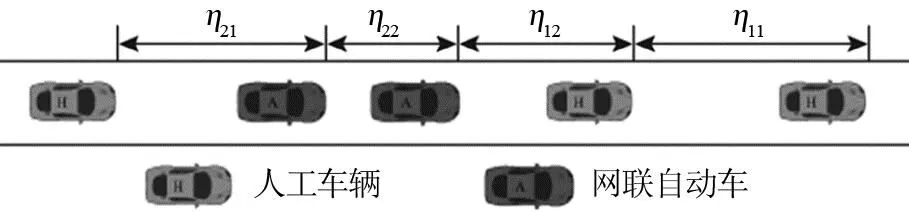
图1 不同驾驶车辆期望车头时距示意图[9]
根据钱国敏等[9]的研究,将以上四种情况简化划分为两种类型,分别为自动驾驶车辆跟随前车行驶和非自动驾驶车辆跟随前车行驶。根据该研究发现自动驾驶车辆跟随前车车头时距a1小于非自动驾驶汽车跟随前车车头时距a2,所以当车流稳定通过交叉口时,自动驾驶汽车占比q不同的混合车流的期望车头时距a也有所不同。根据秦严严等[2]关于车头时距和混合交通流的稳定性研究中,得到了自动驾驶汽车占比q与期望车头时距a的关系,如表2所示。
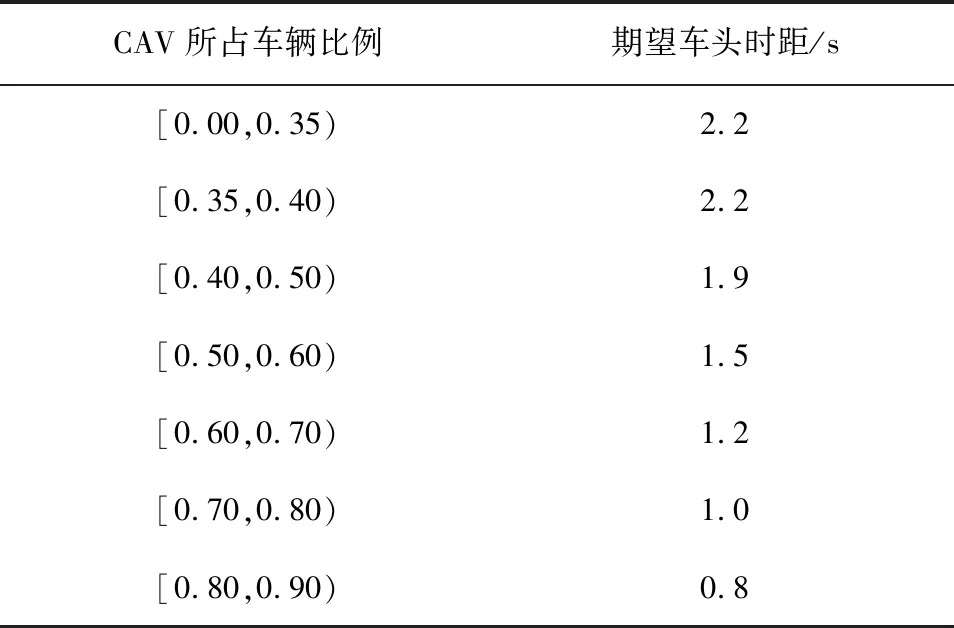
表2 自动驾驶汽车占比与期望车头时距关系表
由表2可以看出自动驾驶汽车占比q增加时,期望车头时距a呈减少的趋势。当自动驾驶汽车占比q达到70%以上时,期望车头时距a甚至小于1 s。究其原因,期望车头时距的明显减少,是因为自动驾驶汽车可以在相对短的距离保证车与车之间不发生碰撞,保证交通安全的同时减少了交通延误。
1.2 冰雪条件对基于混联车流下的信号交叉口影响分析
冰雪条件对基于混联车流下的信号交叉口的影响主要原因是道路湿滑。在冰雪条件下,车辆的行驶速度v、车辆头车启动时间tp、车辆车头时距a,网联车与非网联车驾驶决策的差别等参数与常规情况下对比明显不同,而之前原设的配时方案并没有考虑冰雪条件中各个因素的影响,使其交叉口出现道路通行状况不佳,甚至出现交叉口堵死的情况。
在冰雪天气下,降雪量s是影响道路通行状况的关键因素之一。降雪量是每单位时间内道路的降雪厚度。降雪等级的划分标准一般采用持续时间12 h和24 h两种,根据国家气象局《降水的等级划分》,将降雪量分为4种等级,如表3所示。
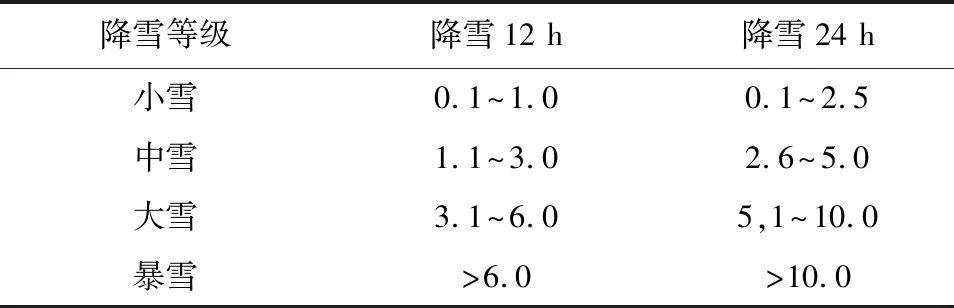
表3 降雪等级对应降雪量表 单位:mm
通过对乌鲁木齐南昌路与西虹路交叉口[10]在冰雪条件与正常条件下的对比调查,如图2所示,调查时发现,受冰雪条件的影响,交通流运行状态程度明显不同。在冰雪条件下,道路上车辆的速度明显降低,驾驶员在停车和启动时小心谨慎,从而使启车时间增加,车头时距明显增大。
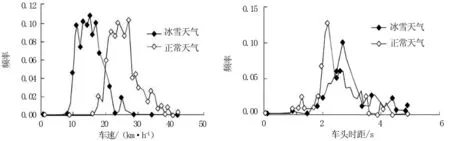
图2 冰雪条件对车速与车头时距关系图[10]
总结,针对冰雪条件这一条件,将以不同的降雪量对车头时距α和车辆启动时间tp影响的定量分析为重点,分析降雪量的变化对这两个条件的影响,进而制定合理的配时方案。
(1)冰雪天气对头车启动时间的影响分析
冰雪条件下汽车的启动时间比正常道路条件下的启动时间长,究其原因,是因为降雪降低了道路的摩擦系数,车轮容易发生打滑现象,进而使车辆启动更加缓慢,而冰雪条件的不同决定了道路摩擦系数的下降程度,通常降雪量越大的道路,汽车的启动时间往往更长。
对于人工驾驶汽车,汽车的车头启动时间tp取决于道路表面的摩擦系数μ和驾驶人的反应时间tq。在不同冰雪条件下,道路的摩擦系数不同,根据裴玉龙等[11]的研究,得到了七种不同的冰雪条件下,道路的摩擦系数μ所对应的取值范围,如表4所示。
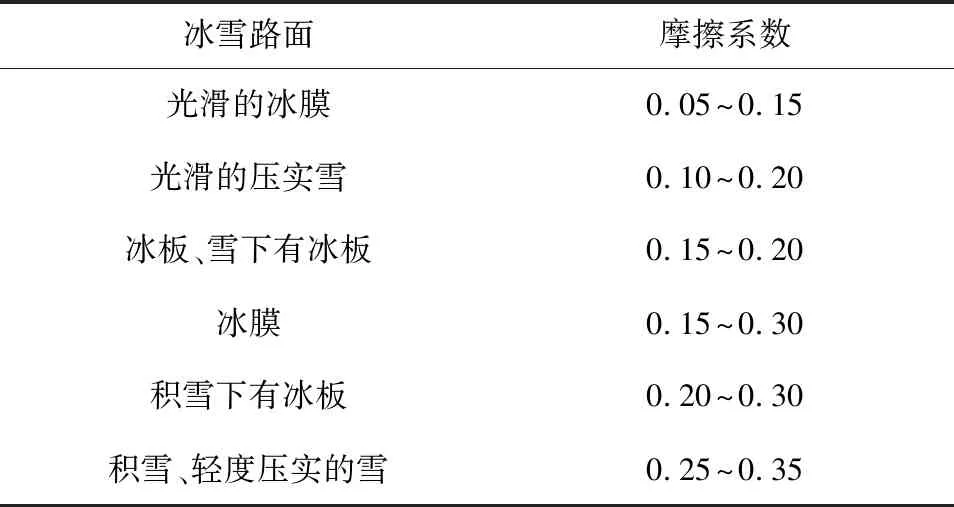
表4 冰雪路面摩擦系数表
对表4分析可知,在道路降雪量不大时,降雪在路表面融化,道路表面变得湿滑,导致摩擦系数下降,当降雪量达到某一范围,路面形成积雪,道路的摩擦系数会小范围回升,但总体道路摩擦系数小于正常情况道路摩擦系数。
(3)
(4)
式中:φ为冰雪条件所造成的增加系数。
(2)冰雪天气对速度的影响
冰雪条件对交叉口交通参数影响最大的就是就是车辆速度v,而车辆速度v是影响期望车头时距和信号交叉口配时的重要参数,车辆速度v对延误的推导和黄灯与全红时间长度的确定有着重要作用。因此,为了更好地分析冰雪条件下的交叉口配时优化,对降雪量s与车辆速度v的关系进行研究分析是必要的。
根据林赐云等[14]的相关研究,获得车辆速度v与降雪量s关系的数据,如图3所示。为了使数据可以准确反映车辆速度的变化情况,用85%的车速来代表不同降雪量条件下的速度值。
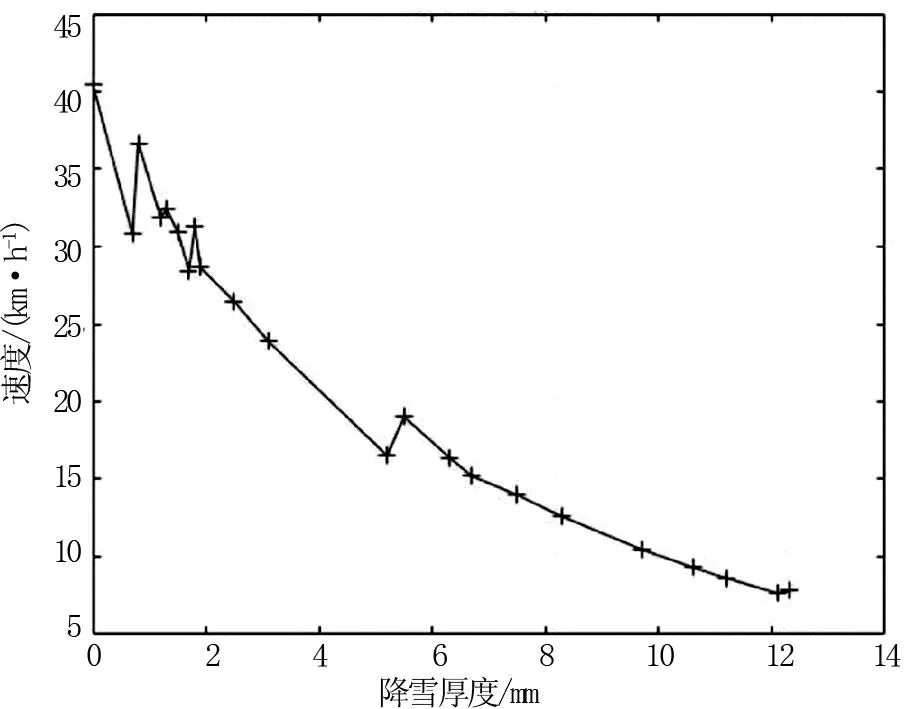
图3 速度与降雪厚度关系图[14]
通过图3可知,随着降雪量s不断增加,车辆速度v成下降趋势。在降雪量不大时,道路情况和驾驶员本身驾驶行为变化不大,车速几乎没有变化;但随着降雪量的增大,当降雪量达到中雪时,车辆速度降低了约30%~40%;当降雪量达到大到暴雪时,车速急剧下降,车流运作缓慢,其原因与道路情况、驾驶员小心谨慎、路段堵塞等有直接关联。
1.3 冰雪天气对期望车头时距的影响
在冰雪条件下,汽车平均车速v下降,车与车之间的行车距离l1在驾驶员心理作用下变大,从而导致人工驾驶车辆车头时距α1显著上升。自动驾驶车辆不受驾驶员心理作用影响,行车间距l2只与道路条件μ有关。
因此,在信号交叉口已经确定的情况下,冰雪天气下期望车头时距变化取决于车辆类型与降雪量的变化。翟京等[15]利用录像在哈尔滨市提取数据,对冰雪条件进行简单分类,分为小雪、中雪、大雪、暴雪、雪泥、薄冰、压实等七种冰雪条件。通过实地测量,运用爱尔朗分布拟合估算出在不同冰雪条件下车头时距的分布曲线,如图4所示。
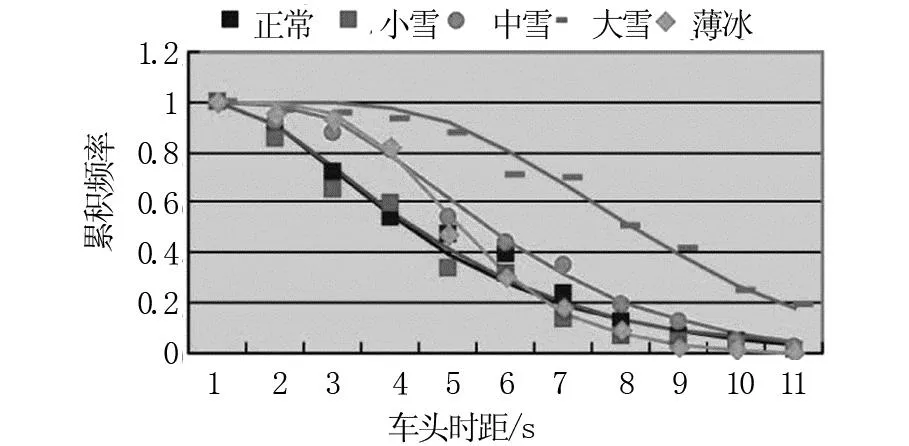
图4 不同冰雪条件下车头时距的分布曲线图[14]
结论为小雪条件下期望车头时距增加了不到20%,中雪条件下期望车头时距增加了20%~30%,大雪条件下期望车头时距增加了30%~50%,暴雪条件下期望车头时距增加了50%~80%,雪泥、压实条件下期望车头时距增加了20%~30%,薄冰条件下期望车头时距增加了30%~40%。因此,将上文得到的期望车头时距的结论与冰雪条件关系代入公式,可得人工驾驶车辆期望车头时距a1在不同冰雪条件下的取值。
对于自动驾驶车辆期望车头时距a2,其与道路摩擦系数μ和自动驾驶期望车速v有显著关系。
(5)
式中:l(μ)是道路摩擦系数μ与期望车头间距l的关系;v是当前冰雪条件下车流的85%车速,m/s。
从公式(5)中可以看出,随着降雪量的增大会导致车辆车头时距延长,由于自动驾驶汽车不受驾驶人行为影响,对自动驾驶汽车车头时距影响略小于人工车辆,所以根据自动驾驶汽车占比调整权重,得到不同冰雪条件下不同自动驾驶车辆占比的车头时距。
a=αa1+βa2
(6)
可以看出,随着降雪量增加,期望车头时距也会增加且自动驾驶汽车占比越少增加的越快。从而可以快速得出不同冰雪条件、不同自动驾驶汽车占比的车流期望车头时距的估计值。
2 网联条件与冰雪条件对信号交叉口交通信号配时优化
2.1 网联条件与冰雪条件对信号交叉口信号周期优化方法
周期时长是影响信号交叉口通行能力的关键参数,其取值的大小往往直接影响着信号优化的效果。此处确定周期时长的方法是通过停车线延误法对延误进行修正,通过修正的延误公式对周期求偏导数,得到车均延误最小的对应周期时长。
根据停车线法延误计算公式得到直行和直左车道延误公式为
(7)
直行和右转混行车道延误公式为
(8)
(9)
式中:tp为头车启动时间,s;n为周期内进口道的到达车辆数,个;R为显示红灯时间,s;m为最大排队车辆数,个;∝为车辆平均到达车头时距,s;l为每周期右转车辆先于其他车辆到达数期望值,查表获得。
该模型中tp前文详细论述了其与网联车和冰雪条件的关系,与实际道路情况结合即可得出tp值。n与车辆到达分布和交通量有密切关系,由于只考虑信号交叉口饱和度不足1且没有溢流的情况,车流密度较小,所以车辆到达分布采取泊松分布。在不同的网联车占比下,当网联车辆到达路口等待时,通过实时获取的信息即可得到较为准确的n值。
对于停车线模型确定最大排队车辆数m,是通过历史数据来进行确定的,在网联混行交通流环境下,可以通过网联车的实时信息交互功能,在前方交叉口红灯排队时,判断排队长度,在车流释放、消散波在网联车前后消散时,即可得到合理的m。
确定最大排队车辆数m后即可计算hTm和hT(m-1)公式为
(10)
(11)
式中:hi为第i辆排队车辆驶经停车线的车头时距,s,其值取期望车头时距a。
车辆平均到达车头时距∝的取值与周期C和周期内进口道的到达车辆数n有关。
(12)
上述公式整合后得到直行和直左车道延误公式为
(13)
直行和右转混行车道延误公式为
(14)
以延误最短为目标,求最佳周期时的公式为
(15)
2.2 网联条件与冰雪条件对信号交叉口信号配时方案调整
(1)黄灯时间与全红时间
①黄灯时间计算
信号交叉口黄灯时间的设置,应满足穿过停车线的车辆及时驶出信号交叉口,减少下一相位正常行车的冲突。在冰雪条件下黄灯时间长度主要取决于尾车是人工驾驶汽车还是自动驾驶汽车,而人工驾驶汽车速度采用历史数据,但是由于道路能见度下降,道路摩擦系数下降导致速度会有所下降,而自动驾驶汽车车速可以实时通过平均车速获取,所以得到黄灯时间Y计算公式为
(16)
式中:s是人工驾驶车辆经过交叉口停车线至完全通过交叉口所行驶距离,m;P1是尾车为人工驾驶汽车的概率,与自动驾驶汽车占比q有关;P2是尾车为自动驾驶汽车的概率,与自动驾驶汽车占比q有关;μv是车辆速度下降比例,与信号交叉口在不同冰雪条件的道路摩擦系数μ有关。
根据公式(16)可计算出冰雪条件下满足人工驾驶车辆通过的最佳黄灯时间。
②全红时间计算
全红时间计算指本相位黄灯末至下一相位绿灯初的时间间隔。该时间间隔要确保在下一相位车辆到达中心线冲突点之前,上一相位车辆能够通过中心线冲突点,在冰雪条件下全红时间长度AR主要取决于尾车是人工驾驶汽车还是自动驾驶汽车,所以其计算公式为
(17)
式中:l为车身长度,m;ω为从停车线到最远冲突车道中心线距离,m;vc为上一相位尾车清空速度,m/s。
对于全红时间,与黄灯时间考虑因素相同,基于尾车种类和冰雪条件影响计算相关概率。
(2)绿信比和绿灯时间
根据确定的最佳周期C,可以得到每周期的有效绿灯时间Ge为
Ge=C-L
(18)
式中:Ge为总有效绿灯时间,s;C为所得周期时长,s;L为总损失时间,s,与启动损失时间、绿灯间隔时间、黄灯时长、一个周期内绿灯间隔数有关。
将Ge在所有信号相位之间按各个相位的接收器比值按照等饱和度原则进行分配,得到各个相位的有效绿灯时间,具体分配方法如下。
(19)

各相位显示绿灯时间gj为
gj=gej-Aj+lj
(20)
最后可计算得各个相位的显示绿灯时间、黄灯时间、全红时间和总周期时长。
3 模型检验
对该模型进行假设验证,依据目前国内许多地区常见的交叉口设置情景,设定二相位六车道十字信号交叉口,信号周期时长90 s,各相位绿灯时间41 s,黄灯时间3 s,全红时间2 s。
现针对在中雪条件和网联车与非网联车混联条件下对该交叉口进行配时优化。获知网联车占比大约为50%~60%,网联自动驾驶车为35%~40%,根据网联车实时信息对东西车道最大排队车辆筛查采取前文方法,筛查估值m为7,车辆到达服从泊松分布,根据网联车实时传输数据估算周期内进入交叉口车辆数,对周期内进入交叉口排队车辆数n进行估算,取值为20。同理可得南北车道m为5,对周期内进入交叉口排队车辆数n进行估算,取值为14。头车启动时间在中雪条件和网联自动驾驶车混行比下tp取4.0 s,期望车头时距取2.8 s。对直行车、左转车、右转车路径选择,默认为8∶1∶1。
利用VISSIM软件对混联车流进行仿真,通过更改车辆跟随车距和车辆启动基本参数模拟不同网联自动驾驶车占比下车流参数变化,在仿真冰雪环境时,需要对其中驾驶员参数与跟驰特性进行修改,所以综合上述两个条件对仿真参数进行修正,以使其符合中雪条件下35%~40%网联自动驾驶汽车占比的混合车流状况。
建立路网后输入参数进行仿真。利用MATLAB对停车线延误模型求解,得到最佳周期时长C为113 s,经过信号配时修正优化后得到东西路段绿灯时间56 s,红灯时间50 s,黄灯时间5 s,南北路段绿灯时间46 s,红灯时间61 s,黄灯时间4 s,全红时间2 s。经VISSIM仿真得到其平均延误时间为18.1 s,直行平均停车次数0.67次,直行行程时间35 s。
与原方案VISSIM仿真的结果延误时间22.3 s,直行平均停车次数1.2次,直行行程时间41 s比较,延误时间缩短了16.6%,行程时间缩短了14.61%,采用新的信号配时方案,该模拟交叉口的交通运行状况得到明显改善。
在仿真过程中,通过更改期望加速度等参数,相较于传统车流,网联混行车流启动损失时间得到改善,混行车流期望车头时距得到相应的优化;网联车占比较大时,可以有效通过对网联车交通量的估计完成对交叉口交通量的实时预算,相较于通过历史数据对交叉口进行优化更具有时效性;通过对网联车实时控制,可以获取信号相位损失时间,进而确定交叉口黄灯以及全红时间,信号交叉口因黄灯时间不足所造成的正常释放车流与上一相位未通过交叉口车流冲突次数明显减少;相较于常态的相位分配,该信号配时优化方法可以提高交叉口通行效率,解决交叉口因冰雪条件所导致的一系列问题。
4 项目总结
小组成员在阅读、参考国内外相关文献的基础上,根据网联与非网联混合交通流的相关理论和冰雪条件下交叉口参数,以传统六车道两相位交叉口为例,对信号配时进行了优化控制。
总结分析了国内外对网联与非网联混合交通流驾驶特性与冰雪条件下交叉口参数的相关研究与经验,基于目前研究存在的问题和混合交通流需求提出了本项目的研究目标。
对混合交通流条件与冰雪条件对信号交叉口的影响分别进行了系统的分析,得出了网联车混合交通流的比例和降雪量与交叉口延误间的关系。
通过停车线延误法对延误的修正公式,提出了混合交通流条件与冰雪条件下的信号交叉口信号周期优化方法,并利用混合交通流特性,对信号交叉口配时方案进行了调整。
利用VISSIM、MATLAB等工具对所得模型进行可行性检验,并代入实地检测数据求解出算例,得到实际结论。
在网联车与非网联车混行的阶段,此处提出的信号交叉口优化方法将基于网联车与非网联车混行的跟驰特性缓解冰雪天气下交叉口的交通压力,降低油耗和碳排放,提高交通效率,减少交通事故,更大程度上发挥网联车的优越性。