分布式孔径相参合成原理、发展与技术实现综述
2024-01-02刘兴华王国玉徐振海汪连栋
刘兴华 王国玉 徐振海 汪连栋
①(电子信息系统复杂电磁环境效应国家重点实验室 洛阳 471003)
②(军事科学院军事科学信息研究中心 北京 100142)
③(国防科技大学电子信息系统复杂电磁环境效应国家重点实验室 长沙 410073)
④(北京航空航天大学 北京 100191)
1 引言
对传统的单平台系统,追求更高的性能离不开加大孔径尺寸,提高放大器功率限制或效率,或采取类似增加功率孔径积的手段。然而,这些方法受设备技术和平台大小等因素的限制,使得提高性能变得越来越具有挑战。比如:雷达系统要克服信号功率与探测距离4次方成反比的损耗,这导致超远距离探测的行星雷达所需的功率水平,就要比普通军用雷达高几个数量级。除直径70 m的大孔径设计外,金石太阳系(行星)雷达(Goldstone Solar System Radar)还要基于超高功率速调管来增加发射机功率,但速调管的设计和维护都很有挑战性,组装时间堪比寿命周期(大概在1年左右)[1];而且当天线孔径增加至70 m时,天线转动部分质量将近3000 t,还带来一系列的工程问题,如:天线重力下垂、风负荷大、热变形、天线面加工精度高等[2]。同时,大孔径还制约了装备的机动性,使其战场生存性面临挑战。
相较而言,将单个大孔径分解为由多个小型孔径构成的分布式系统(见图1),这些孔径相参地发射和接收信号,并通过精确控制孔径间的相对电状态,使发射或接收的信号在载波频率上相参叠加最大化功率合成,获得与发射孔径数量的平方乘以接收孔径数量成比例的信噪比增益。理论上,相同大小的M个发射孔径和N个接收孔径相参合成后的信噪比增益为M2N[3]。这样一种“积少成多”的多孔径相参合成思路,不仅能获得比拟于大孔径的功率孔径积,还兼有机动性和经济性的优势,是替代大孔径的潜在技术选择。同时,简单地配置孔径点数目还能改变系统性能,并对单孔径故障或干扰具有弹性[4—7]。
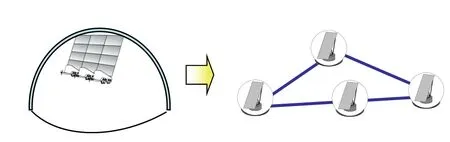
图1 将大孔径分解为更小、更便宜的小孔径构成的分布式系统Fig.1 Decompose large-aperture into distributed systems consisting of smaller and cheaper mini-apertures
利用分布式孔径相参合成提升探测性能并不是一个新概念,20世纪50年代末和60年代初,为支持深空卫星的通信和遥测,在这一领域有大量的工作。比如:Van Atta天线使用特殊的电路设计,使阵列实现方向回溯和天线功率自聚焦[8],在这里阵元充当分布的小孔径;还有自定向(Self-Phasing)阵[9,10],先感知各阵元入射信号的相位,将其共轭后再发射,也能实现各阵元功率在信源处聚焦,但只适用于窄带信号。
对宽带信号和任意排列的孔径,简单地通过电路设计和共轭处理无法实现方向回溯的空间能量聚焦,而时间反转(Time Reversal)1)最早由声学领域的研究者提出,2004年被引入电磁学领域[11]。处理提供了更通用的方法。时间反转处理就是将各孔径接收的点源辐射时域信号,在时间轴上进行反转处理并发射,发射后的信号回溯原信道,在初始源所在的位置汇聚并形成功率聚焦点,就好像时间在“倒流”[11—14]。然而,上述孔径合成依赖于来自合成目的地的信号输入,这种合作式输入在通信和遥测应用中比较常见,但在遥感和雷达应用则不然。近年来,针对遥感和雷达应用,还出现了许多无需合成目的地信号输入实现相参合成的解决方案[4,15—19]。
然而,上述研究往往基于某种特定场景或针对某个特定关键技术展开,缺乏系统的梳理与总结。为此,本文从分布式孔径相参合成概念及实现原理出发,概述其在导弹防御、深空遥测遥控、超远距离雷达探测、射电天文等领域中的发展应用情况。在此基础上,对分布式孔径相参合成面临的共性问题及关键技术进行概括与分析,并对未来的发展趋势进行展望,为相关从业人员提供参考。
2 分布式孔径相参合成概念及实现原理
分布式孔径的功能(发射、接收或者两者兼有之)差异,会影响相参合成的描述,所以有发射相参合成、接收相参合成以及收发相参合成的区别。具体地,发射相参合成关注分布式孔径发射的信号经协同处理后,能同时且同相到达期望的目的地并正向干涉(也就是能量聚焦),最大化空间目的地处的合成功率,如图2(a)所示;接收相参合成关注分布式孔径对来自远程波达信号的协同处理能力,目的是对齐各孔径接收信号的时间和相位,并以相参叠加的方式提升信号质量,形成指向波达方向的数字接收波束,如图2(b)所示;而收发相参合成则兼具二者的特点。尽管区分发射和接收,相参合成有着不同的描述,但就合成的结果来看都是在射频信号级对物理分置的孔径进行相参协同处理。
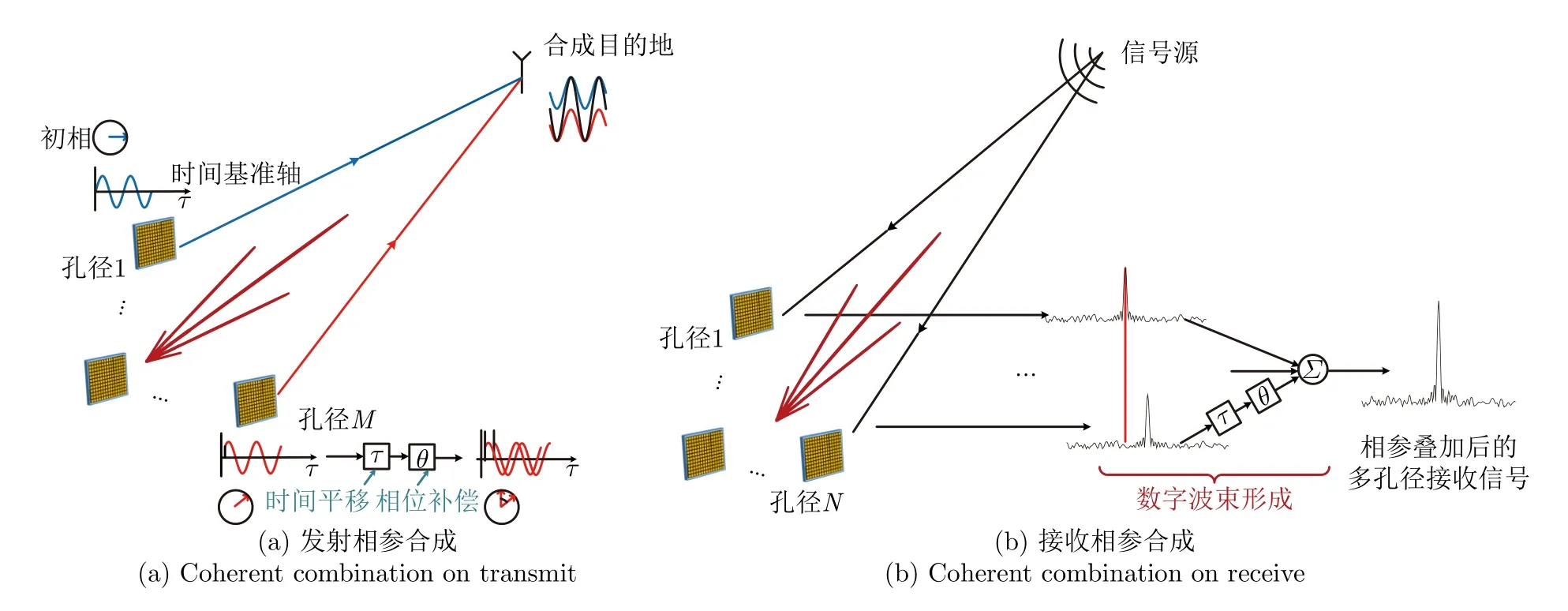
图2 分布式孔径相参合成示意Fig.2 Schematic diagram of coherently combining distributed apertures
在指定空间位置处进行功率合成并不陌生,相控阵雷达就是对固定规则排列的阵元信号添加适当的移相或延时,以达成任意方向上的功率合成或波束偏转。但对空间分置的孔径,实现类似的功能,要面临更为复杂的挑战,主要有:
(1) 相控阵空间功率合成基于对阵元位置的精确了解,根据阵元位置的精确先验知识,就可以计算并补偿阵元空间位置差异带来发射或接收波程的变化。而对分布式的系统,各孔径位置并非相对固定,这使得波程补偿变得复杂。即便孔径位置可以测量,所需要的精度也应在波长量级;
(2) 物理上的分散性,导致分布的孔径无法为彼此间相互独立的电子设备提供一个统一的全局时钟,各孔径只能在各自维护的本地时钟下运行,这将带来严重的时序问题。
由于分布式孔径间相参性退化主要源于传播路径差和同步误差2)分布式孔径部署范围远大于传统相控阵阵面,相对近距离探测场景下,孔径间观测视角上的差异或带来极化不匹配、大气效应差异,甚至收发式孔径还可能引入目标散射差异等。这些因素带来的相参性退化比较复杂,且高度依赖于探测的环境和孔径分布范围。后续的讨论暂假定分布式孔径相对探测场景是集中式布置的(co-located),近似忽略视角差异带来一系列的相参性退化。,反映在射频信号上表现为时间上的错位和相位上的偏差[4,5]。那么从校正的思路出发,若能在波长量级的尺度下精细操控各孔径的信号发射与接收,对偏差进行补偿使时间和相位对准,就能实现相参合成。在具体工程实践上,区分是否需要来自合成目的地处的外部信号输入,校正可分为两类实现架构[4,16]:闭环式架构(Closed-loop)和开环式架构(Open-loop)。
2.1 闭环式架构
闭环架构实现相参合成需要有合成目的地处合作或非合作的外部信号输入,如:目的地直接发射的信号、目的地处目标的反射信号以及目的地处合成功率等信息。在反馈信息辅助下,估计发射和接收中用于时间和相位对准的相参合成参数再进行偏差校准并合成。
以发射相参合成为例,目的地处的合成信号可表示为
由式(1)可知,闭环式架构无需细分和控制各个潜在的相参性退化来源,都将其打包归结为未知的相参合成参数。这样一来,精确的孔径位置测量和固定的时频同步偏差校准4)若时频同步偏差是时变的,需各孔径有高稳的振荡源并定时进行闭环式校正,即视变化的同步偏差是随时间阶梯变化的。对闭环式架构实现将非必需,但也限定只能在反馈来源处相参合成,不能任意切换合成波束位置。其基本实现步骤为:(1)在一定时频基准下,接收合成目的地处的外部信号输入;(2)根据外部信号输入,估计发射/接收相参合成参数;(3)基于估计的相参合成参数调整收发时序与相位,在合成目的地(外部馈源)方向形成波束,见图3(a)。

图3 相参合成实现架构Fig.3 Implementation architecture of coherent combination
特别地,还可以直接对输入信号做“反转”处理实现发射相参,如相位共轭[9]、时间反转[13]等,步骤2变为:对接收的外部输入信号做“反转”处理并发射;步骤3变为:发射的“反转”处理信号回溯原传播信道,并在合成目的地(外部馈源)处干涉聚焦,但这需精确的时频同步。
2.2 开环式架构
开环架构无需合成目的地处的外部信号,就能实现相参性退化的自校准。由于不受外部输入的限制,可类似于相控阵在任意方向上进行功率合成。但这样的灵活性是以精细溯源并校准各种因素(包括但不限于,孔径空间位置差异引入的波程差,时频同步误差等),所带来相参性退化为代价的[16]。
同样,以发射相参合成为例,目的地处的合成信号可表示为
其中,s(t) 为各孔径发射的共同基带信号,Δκ2,δf2,φ2分别为孔径2相对参考孔径(孔径1)的时间、频率和相位同步偏差,距离差计算采用远场近似R2-R1=-dsinθ/λ,λ为波长,为估计的孔径间距,θ为孔径基线与合成方向夹角(通常已知)。理想校准后,式(2)的合成信号变为
即实现了在合成目的地处正向干涉最大化功率合成的目的。
可见,孔径位置准确测量和时频同步(Δκ2=0,δf2=0,φ2=0)是开环式架构相参合成的前提。其基本实现步骤为:(1)孔径间进行时频传递精确自同步,并测量孔径位置或间接标定其同步和位置偏差;(2)在时频同步和空间位置测量基础上,计算各孔径在A方向相参合成所要调整补偿的时间和相位(即相参合成参数),并向目的地A方向形成波束/相参合成;(3)同理,向目的地B方向形成波束,见图3(b)。
综上,由于在精确孔径位置和时频同步上的非必需性,闭环式架构实现难度要低于开环式架构,但其必要的合成目的地处信号输入以及合成波束的单一指向,也限定了其通常在合作场景下应用。表1给出了两种架构的详细的对比。

表1 闭环式和开环式架构对比Tab.1 Closed-loop vs.open-loop architectures
3 分布式孔径相参合成多领域发展
3.1 导弹防御应用
2003年,美导弹防御局与林肯实验室等发起一项研究,调研能够满足未来弹道导弹威胁要求的先进雷达传感器概念。这项研究的建议就是开发下一代雷达(Next Generation Radar,NGR)系统[5],核心是以“搭积木”的方式相干合成多个分布的雷达孔径,实现机动性和增强的目标识别能力(即“单部雷达看不清,合成以后看得清”),见图4。
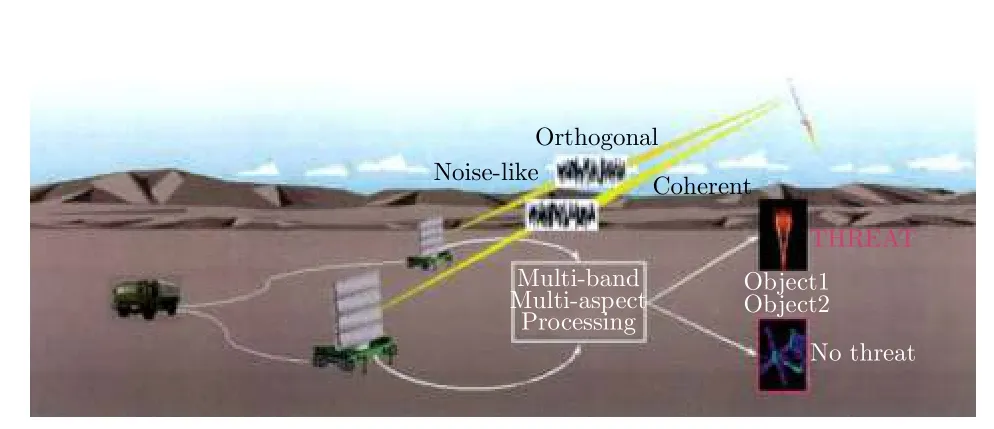
图4 分布的多雷达孔径相参合成概念[5]Fig.4 Conceptual architecture for coherently combining multiple radar apertures[5]
NGR利用雷达孔径主动传感的特点,各分布式雷达先向检测并捕获的非合作目标发射正交信号,以目标的反射信号为外部输入,周期地估计各雷达用于对齐时间和相位的相参合成参数;再发射经估计相参合成参数调整的相同波形,使得发送的脉冲同时同相到达目标,即以闭环式架构实现相参合成[5,20,21]。为验证NGR概念,林肯实验室在美国空军研究实验室伊普斯维奇天线靶场(2004年08月)和白沙导弹靶场(2005年07月),对水塔、飞机和导弹等目标,成功实现宽带分布式双雷达相参合成演示试验,获得接近理论9 dB的信噪比增益[21]。
2012年9月美国国家科学院报告《认清弹道导弹防御:美国助推段导弹防御概念和系统及与其他替代方案的比较评估》提出建造5部X波段的“堆叠式”TPY-2雷达。该雷达使用两部TPY-2天线(含两套冷却和电源供应单元),一部堆叠在另一部上面,通过额外的时延装置实现相参合成,以提供两倍的功率和两倍的孔径[22,23],表2[22]给出了X波段典型雷达的比较。报告中提到的“堆叠式”TPY-2,就是NGR概念的延伸6)由于成本的考虑,美国国土防御传感器取消了该X波段雷达选项,改为建造S波段的远程识别雷达(Long Range Discrimination Radar,LRDR),但在论证中“堆叠式”TPY-2一直作为LRDR的替代方案存在。。类似于NGR概念,日本采购、技术和后勤局[24],航天科工二院二十三所[2,25—27],北京理工大学[6,28—30],国防科技大学[31—34]等都开展了相关研究。

表2 X波段典型雷达比较[22]Tab.2 Comparison of typical radars in X-band[22]
3.2 深空遥测遥控应用
2006年,喷气推进实验室(Jet Propulsion Laboratory,JPL)在美国航空航天局(National Aeronautics and Space Administration,NASA)赞助下,利用戈尔德斯敦深空站的2个34 m天线(DSS-24,DSS-25)发射7.15 GHz未调制的载波信号,在火星全球探勘者号上实现相参上行链路阵列的实验演示[35]。该实验目的是通过对某一个发射天线的相位控制,实现两个上行链路信号在航天器上的合成功率最大化。实验中,相参上行链路合成采用闭环式架构,分多步对不同因素带来的相参性退化进行校正。首先,由于航天器与天线存在相对运动,需要精确的频率预测来补偿地球自转以及航天器绕火星运动引入的双天线间差分多普勒。然后,将DSS-24天线的载波相位从0 rad斜坡遍历到 2π rad,只要在斜坡遍历期间天线相位不漂移,航天器上双天线的干涉功率必将出现峰值,这样最佳相位调整8)用于解释和补偿差分多普勒预测误差、天线间的初相差异,以及未确定的剩余相位偏差。就能根据合作航天器回传的实时干涉功率变化值确定。
2007年,JPL利用星历表精确已知的月面取代合作航天器,提出基于月面反弹的偏差标定实验方案[36—38],作为开环式架构中上行链路合成的起始准备。标定时,参考天线与待校准天线都指向月面选定的第谷陨石坑的中心峰,先根据精确到分数弧秒精度的星历表,预先计算地球自转导致不同天线间的差分多普勒并补偿,确保每个天线发射的载波以相同的频率到达月球。由于地球自转和月球天平动导致月面相对地面天线呈现自旋运动,使得天线中心指向点附近散射点的反射回波存在不同的多普勒频移,选择合适长度的伪随机编码信号就能分离出具有不同多普勒频率和距离的“像素点”,进而对月面目标进行成像。但两个天线载波间的干涉又使得所成的“多普勒-距离”像存在明暗相间的条纹。理想情况下,第谷中心峰应出现在相邻干涉暗纹的正中,而实际存在随机初相等剩余相位偏差,第谷中心峰与干涉暗纹正中存在一定的偏移。由于相邻干涉暗纹间相位变化为 2π,划分线性标度就能估计出相位偏移,如图5所示。2009年,JPL完成实验演示,经该方法校准后的天线(DSS-24/25/26),发射相参上行合成信号到EPOXI航天器并被成功接收。
同一时期,JPL还利用发射塔上安装的校准接收器,实施Ku波段(14 GHz) 5个1.2 m天线的偏差标定。标定时,各天线依次指向校准接收器发射正交的伪随机信号,根据接收端分离信号的量测,解算出各天线间初相和时间偏差,以及天线位置偏差[39],标定场景如图6所示。标定校准后,发送到几颗商用地球静止卫星的上行链路相参合成信号被成功接收,且系统相位稳定近3周。
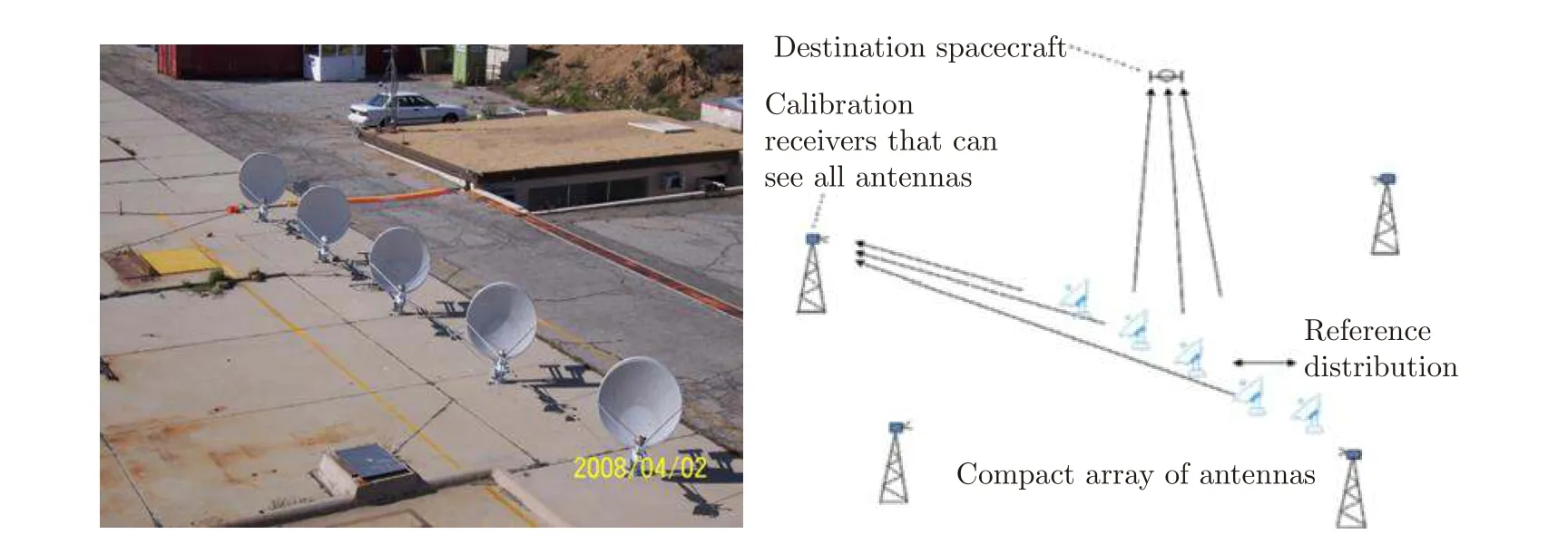
图6 5个1.2 m天线的上行链路合成阵列及偏差标定校准方案[39]Fig.6 Five 1.2 m Ku-band antennas coherent uplink array and bias calibration scheme[39]
2017年,NASA将相参上行链路合成拓展到Ka波段。与X和Ku波段不同,Ka波段的对流层效应比X波段大4倍,比Ku波段大2倍,上行链路合成需额外对大气波动实时补偿。实验中,采用基于同波束内参考源(已知角度位置的卫星信标或背景天体源,如类星体、行星等)的方法[40,41],由于参考源角度已知,而同波束内对流层上行和下行传播影响可认为基本相同,测量天线间接收信号矢量变化就能获得传播路径中对流层施加的效应,也就能对上行链路进行校正。
3.3 超远距离雷达探测应用
美空军于2017年启动深空先进雷达能力(Deep Space Advanced Radar Capability,DARC)计划,在全球范围内选择3个站点(澳大利亚、英国、美国)构建雷达网,来跟踪地球同步轨道及以外的活动卫星和碎片。DARC每个站点容纳10~15个直径为15 m的抛物面天线,其中4~6部天线集中部署用于发射,其余天线近发射天线区分布用于接收,总占地约1 km2[42]。DARC的核心特点就是使用较小的稀疏的碟形天线构成相参合成阵列,以取代单个大型天线并节省成本,见图7。从DARC有灵活跟踪波束指向,不难推断其合成架构为开环式。2021年,约翰霍普金斯应用物理实验室完成了该技术的演示验证,据称其思想就源于NASA&JPL的上行相参上行链路阵列研究[43]。
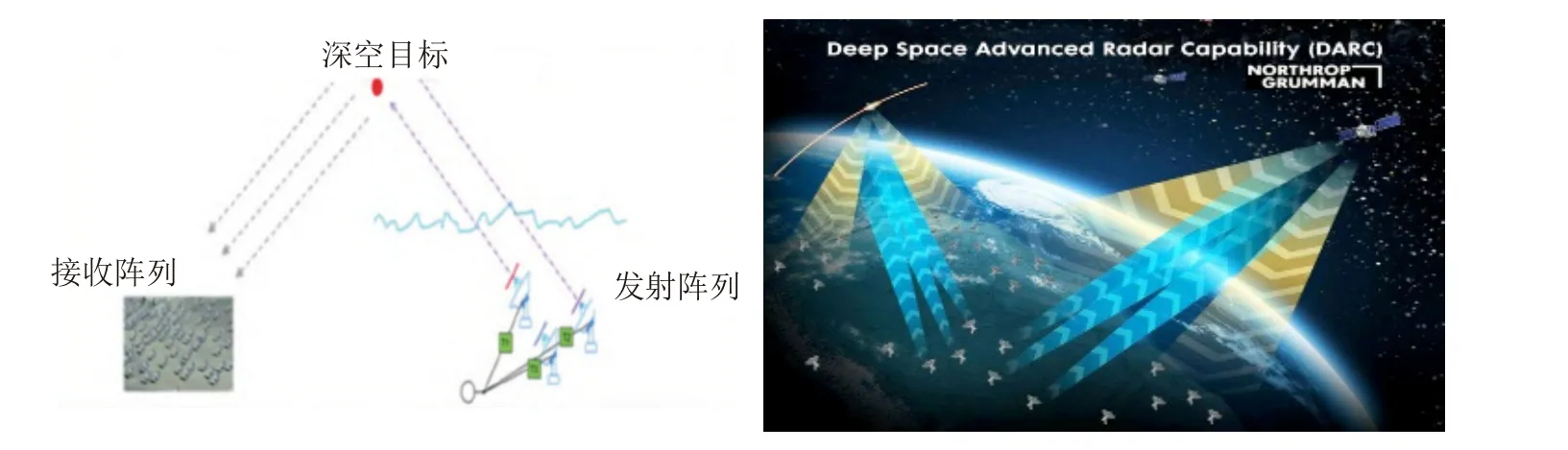
图7 “深空先进雷达能力”计划概念示意Fig.7 Conceptual architecture of Deep Space Advanced Radar Capability (DARC) project
类似的思想还在近地小行星的科学和行星防御得到应用,如:2022年JPL提出地面天线阵列行星雷达系统,通过相参地组合发射和接收信号,实现比阿雷西博雷达更大的有效孔径和更高的灵敏度[1,44];以及2021年底开工建设预期探测距离上千万公里,拟由25台30 m孔径雷达组成的“中国复眼”,未来还考虑将合成雷达增至100部,探测距离进一步增至1.5亿公里[45]。
3.4 射电天文应用
在射电天文领域,分布式(接收)孔径相参合成也得到广泛应用,用以实现角度超分辨和超远距离探测,但更多的时候是以干涉孔径合成技术[46]被熟知,在甚大天线阵(Very Large Array,VLA)[47],平方公里阵(Square Kilometer Array,SKA)[48],以及2019年获得首张黑洞图像的事件视界望远镜(Event Horizon Telescope,EHT)[49]等中得到应用,合成架构为开环式。
其中,VLA由27面直径25 m的抛物面天线组成,Y型排列(见图8(a)),工作于6个波段。图8(b)给出VLA的瞬时空间频率覆盖及对应测量图像;若利用地球自转带来的基线变化,经时间累积后可扩充空间频率覆盖。图8(c)给出累积4 h后的结果,进一步将3个不同频点所接收的时间累积数据合成,成像质量进一步增强,如图8(d)所示。

图8 甚大天线阵中多个小孔径接收相参合成,并在时间和频谱维进一步积累合成[47]Fig.8 Small aperture in the Very Large Array (VLA) coherently combining on receive,and future accumulating in time and spectral dimension[47]
综上,分布式孔径相参合成在多个领域都得到应用,并呈现3个共性特点:
(1) 把分布式孔径相参合成作为替代大孔径的可行低成本技术选择,以应对远距离探测信号功率与探测距离的4次方或平方成反比导致的功率衰减;
(2) 合成探测对象多为运动规律满足力学约束的弹道导弹、轨道类或天文目标,且位于分布式系统的远场。尽管这些条件并非相参合成必须,但这样的探测场景可降低孔径间差分多普勒和差分时延预测生成的难度;
(3) 孔径本身站址固定且较探测距离分布集中,还要有一定的时频同步精度和高稳的本振。
不难看出,分布式孔径相参合成是“限定的”,不仅有特定的应用范围,还需要具备必要的实现条件,如时频同步条件、孔径几何布置条件等。
4 分布式孔径相参合成关键技术
在第2节概述相参合成原理时,已假定分布式孔径相对探测场景是集中式布置的,来保证孔径间信号具有相参性,这表明并非任意长度的孔径基线都能相参合成。对目标发射的信标类信号,基线d的选择应该在目标发射天线的主瓣内(d <Rλ/D,D为目标发射天线孔径,R为信号传播距离);而雷达散射类信号,需要的条件将更加紧致,既需要满足等效主瓣覆盖约束,还要进一步满足基线布置造成的散射特性不发生显著改变。一个参考条件为d <Rλ/(8L),L为垂直于视线方向目标的最大横距[50]。只有在满足孔径几何布置约束下,才能通过时间和相位校正的方式实现相参合成。
从校正实现相参合成的原理可知,时频同步是相参合成的必要准备,而相参合成参数是对准时间和相位的关键要素。为此,本节就涉及这两大问题解决的高精度分布式时频传递和同步技术,相参合成参数估计、标定和预测技术进行讨论。
4.1 高精度分布式时频传递和同步技术
分布式孔径本地时钟的运行环境、时钟频率本身就存在差异,且经过一段时间的独立运行后,不一致性将进一步放大,影响孔径合成效率。分布式系统运行之初,以及隔一定的时间就必须对各孔径节点的时频进行同步校准,使其具有一致的基准,即瞬时时刻和时间间隔(即频率)。因此,如何实现分布式系统的高精度时频传递并同步是相参合成的首要关键问题。
4.1.1 时间偏差溯源及对齐
一般参考主时钟T0(t)传递时间给节点n的从时钟Tn(t)后,存在一定的偏差,表示为
其中,t为真实的全局时间,τn0为时间传递路径引入的恒定延迟,为节点间的频率漂移(随机游走)、热膨胀以及传播环境变化等引起的时变延迟,εn(t)为热噪声等引入的噪声项。可见,时间同步/对准的关键就是要溯源出主钟与从钟间的偏差并调整补偿。
若假定时间传递前本振频率已锁定,Δτn0可以认为是准静态的。这样时间偏差溯源就变为噪声背景下的估计问题,方法可大致分为两类:单向(one-way)同步法和双向(two-way)同步法。单向同步法指作为同步基准的中心站/主站把同步校正信号单方向传送到各个待同步节点。此类方法的困难在于,需要先验已知中心站和节点的精确基线信息或位置,或根据已知位置的多个时钟源求解信号传播时延。全球卫星导航系统(Global Navigation Satellite System,GNSS)授时就是典型的one-way同步方法,GNSS卫星充当“主”时钟源,用户根据每个卫星提供的星历表、时间基准信息、导航电文发射时刻等信息,解析出用户位置及信号的传播时延,据此调整补偿节点本地时钟与主源同步[51,52]。
另一类是双向同步法,中心站和节点通过建立的通信链路向对方发送测距信号,在往返传输延时对称性和同步期间时钟不漂移假设下,以交换时间戳(timestamp)的方式回溯出主钟与从钟间的偏差。以图9为例,测距信号从主钟发送到从钟并返回,记录每次发送和接收的时间戳,测量发射信号时戳与本地接收时戳的时差,再将测量的2个时间差相减,就得到设备间钟差,可表示为[53]

图9 Two-way交换时间戳的方式实现时间同步Fig.9 Time synchronization by two-way timestamps exchange
其中,往返传输延时对称性定义为τn0=τ0n,同步期间时钟不漂移定义为 Δτn0=Δτ0n=const。一旦钟差被估计,就可将其添加到节点n的本地时钟来补偿时间偏移。若有长时间的时钟偏差量测,结合Kalman滤波等技术,还能对时钟间的漂移特征进行推断和跟踪,可进一步提升时间传递的稳定性。
双向同步法从原理上对消了传播路径时延,较单向同步法无需已知平台之间的精确基线信息,时间同步误差也由微秒提升到纳秒量级。目前较为成熟的卫星时频同步方法如:卫星双向时间频率传递法(Two-way Satellite Time and Frequency Transfer,TWSTFT)[54]及其基于双频载波相位测量钟差的改进[55,56],以及广泛应用于以太网或互联网中的IEEE 1588时间同步协议[57],都基于双向传输交换时间戳计算钟差并补偿的原理。2008年,在IEEE 1588v2协议基础上White Rabbit协议被进一步提出,核心是采用同步以太网9)同步以太网较传统以太网的区别在于,其网络中的每个节点时钟都经过内部的锁相环电路锁定到主节点,来消除相位抖动。和全数字双混频鉴相器(Digital Dual Mixer Time Difference,DDMTD)技术,使得钟差可根据载波相位差量测估计,提升同步精度至亚纳秒级[58]。
4.1.2 频率传递与相位对准
一般分布式系统首先需要同步的第一个电状态就是频率,没有频率同步将无法进行相位对准,分布式节点上的时钟也将连续漂移。频率传递就是将高稳定主站产生的频率标准传递给节点恢复使用的过程,该过程一般利用节点在本地端的锁相环电路(Phase-Locked Loops,PLL)对传递后的相差进行实时补偿[17,59,60],实现节点本地振荡器相对频标信号相位的跟踪和锁定(维持相同的相角)来获得稳定的频率信号。
理论上,基于PLL电路就能实现频率同步,但频标传递中的链路噪声以及内部通道误差又带来相位偏差记为[61]
若假定参考源高稳,即式(6)第1项近似为0,Δφ0→n中的恒定相差就可以通过合适的相位调整类补偿。常见相位对准方式有2类,往返(Round-trip)校正原理和反馈式校正。Round-trip顾名思义就是要形成主站与节点的传输闭环,即沿相同的频率传递信道进行往返传输。在链路传播噪声不受传输方向影响的假设下(φL|0→n=φL|n→0),往返传输引入相位噪声是单向传输引入的2倍[62]。因此,通过拍频测量链路往返的相位变化即可求得传输相位噪声,而各节点内部通道引入的附加相位φin|0→n由预先进行的内校准标定[63]。
而反馈式校正则需来自合作目标的反馈将节点相位调谐,比如:根据目标位置处接收功率增益大小执行必要的相位调整,直至获得最大的功率增益[35,64];或由合作接收节点对各发射节点的载波相位进行估计并反馈,根据设定的时隙利用Kalman滤波来预测发射节点的偏移相位和频率[65]等。
4.1.3 相参合成时频同步容许偏差分析
分布式系统未能理想同步带来的直接影响就是各孔径收发信号存在时间和相位上的偏差。暂不考虑其他因素的影响,仅讨论由同步导致合成增益损失,以接收相参合成为例,存在时频同步偏差的合成信号为
进一步,定义较理想情况的合成增益损失(单位为dB)为
可见,无论是有剩余偏差的合成信号功率|A(t)A*(t)|,还是理想合成信号功率N2,都与孔径个数N有关,所以孔径个数N影响合成增益损失。
不妨假设脉压后的包络为sinc函数,根据式(7)和式(8)进行10000次Monte Carlo实验,来统计不同时频同步偏差条件下,Gloss<0.5 dB的概率,结果如图10所示。实验结果表明:
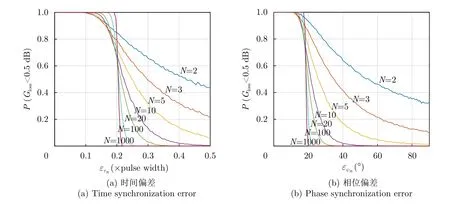
图10 不同同步偏差条件下,Gloss不低于0.5 dB的概率Fig.10 Probability that Gloss no less than 0.5 dB as a function of synchronization error
(1) 相参合成同步偏差的要求与孔径数量有关。在高概率实现部分,增加孔径个数能降低同步误差要求,但随着同步偏差的增加,孔径个数越多,概率线急剧下降并收敛至零;
(2) 时间同步偏差需求取决于公共基带信号s(t),并与其脉压后的窄脉冲宽度成比例。若能控制时间同步标准偏差在脉压后窄脉冲宽度的14%以内,Gloss<0.5 dB的概率有95%以上;而相位同步标准偏差需控制在15°以内,对应时间尺度小于λ/24。
仿真条件不变,进一步考虑同时存在时间和相位同步偏差的情形,结果如图11所示。可见,时间和相位同步偏差都会影响给定概率下的Gloss。为维持相同的合成增益,时间同步恶化带来的合成增益损失,需要减少相位同步偏差来弥补,且随着相对带宽B/fc的增加10)对坐标轴进行尺度变换,记,(x,y)分别为尺度变换前后的坐标值。由于坐标轴尺度变换相当于对图片进行拉伸或缩放,并不改变过原点的斜率,其中 k 和 α 为常数。那么,从A点拉伸或缩放到B点的过程中,为保持 k恒定,减小的过程,就是相对带宽B/fc增加的过程。,相应地要减少更多的相位同步偏差(图中表现为变陡峭的斜率,且孔径个数越多,变陡峭的趋势越慢)。特别地,当相对带宽较小时(即窄带信号),时间同步偏差对合成增益的影响可近似忽略。
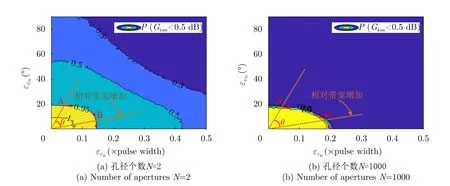
图11 同时考虑时间和相位同步偏差时,Gloss 不低于0.5 dB的概率Fig.11 Probability that Gloss no less than 0.5 dB,when jointly considering time and phase synchronization error
需要注意的是,上述分析结论建立在其他影响因素被理想的校准的基础上。实际基于开环架构实现相参合成时,孔径位置量测误差、波束指向误差等都会引入额外的时间和相位偏差,上述给出的时频同步指标可看作最低要求的同步容许偏差基准。闭环架构实现合成对时频同步的要求一般低于开环架构,影响其合成效率的核心因素在于从外部含噪扰(热噪声、分离正交信号带来的互相关能量泄漏等)的信号输入中解析出相参合成参数的准确性,详见文献[34,66]。另外,由于合成目的地处的外部信号输入对闭环式架构而言是必要的,这附加引入了空间同步的要求,来确保各孔径有稳定的外部信号输入。
表3[53,67—70]给出了各类典型时频传递方案所能达到的指标对比。其中,光载射频传递就是对激光载波进行微波频率信号的幅度调制,核心是利用光载波低损耗特性和宽带信号传输能力。2021年,国家授时中心在112 km光纤上进行高精度光载微波频率传递,实现4.2×10—15@1 s和1.6×10—18@1 d频率稳定度[69]。而光学频率梳时频传递11)光学时频传输得益于光原子钟的更高的跃迁钟频率,使得时频计量较微波原子钟高了3到4个数量级,频率不确定度达10—18~10—19 s—1。是以光学频率梳[71]为纽带,将高稳定的光频标与MHz的微波频率连接,直接获得高稳定的光学频率[72]。2020年,意大利计量研究所用1739 km长的光纤向两个射电望远镜传递相干光学频率信号。较本地氢钟或光载微波传递,频率准确性和稳定性提高2个数量级[73]。
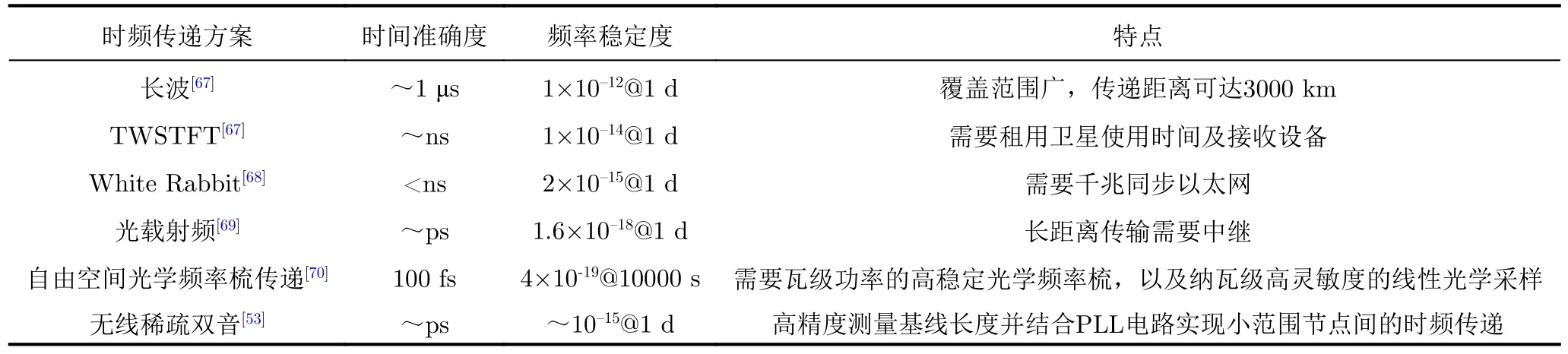
表3 典型时频传递方案的指标[53,67-70]Tab.3 Indicators of typical time-frequency transfer methods[53,67-70]
对比可以看出,就分布式孔径相参合成而言,GNSS提供的同步能力在频率稳定度上过于粗糙(X波段10 GHz,1天累计漂移约1555.2°),无法支撑高微波频率下的长时间相参合成。当前可行的方式是基于双绞线和光纤进行时频传递,或用无线或有线的方式定时进行时频传递和自校正,但无线传递的方式对传递信道要求较高,且易受到干扰。
4.2 相参合成参数估计、测量标定和预测技术
除必要的时频同步外,分布式孔径相参合成还需要额外用于对准时间和相位的必要参数,来解释和校正除同步误差以外的相参性退化来源。这些参数随相参合成实现架构,甚至是场景的变化而有所差异。如何对这些必要的参数进行辨识、追踪,则是相参合成的另一关键问题。
4.2.1 闭环架构下基于非合作目标反射信号的相参合成参数估计
闭环架构一般基于合成目的地处的合作外部输入实现相参合成,本质上是根据输入对各孔径收发参数的遍历优选或调谐[35],一旦外部馈源非合作且不发射信号,遍历的思路将不再可行。若待合成的孔径是主动发射信号的雷达,探测区域中目标反射回波其实就是一个持续的外部输入,利用其作为固定外部馈源,辅助估计相参合成参数则成为另一类思路。
具体地,由于收发相参合成参数是一个相对值,对这样一个问题,解决的基本思路就是各雷达发射正交信号分离收发路径,选择共同发射传播路径不同接收传播路径或共同接收传播路径不同发射传播路径的回波对,分别估计接收和发射相参合成参数。记ylk(t)表示分离出的回波,对应的传播历程为由雷达k发射的信号经目标反射并被雷达l接收,{yl1(t),ylk(t)}为共同接收传播路径不同发射传播路径的回波对,该回波对间的时间和相位差异恰是由雷达间传播路径差和同步误差导致的,估计此差异就得到发射相参合成参数。图12以双雷达发射相参参数估计为例,详细描述了此过程。同理,亦可估计接收相参合成参数。

图12 基于非合作目标反射回波估计相参合成参数原理Fig.12 Principle of coherent combination parameters based on reflection echoes from non-cooperative target
基于上述原理,相参合成参数估计算法如峰值法[5,74]、相关法[5,75]被提出,但由于发射正交信号的非理想性,分离出的回波中总伴随着由正交信号非理想引入的互相关能量泄漏,导致发射相参合成参数估计值有偏。为解决这一问题,文献[32]以全极点模型参数化回波信号为基础,提出“重建-剥离-重建”的处理流程整体剔除互相关能量泄漏,并在重建的“干净”分离回波上得到无偏的相参合成参数估计;而文献[33]通过设计灵巧正交波形仅抑制影响相参合成参数估计的互相关能量泄漏,实现与整体剔除互相关能量泄漏同等的效果。
由于相参合成参数估计精度直接影响合成增益,文献[34,66]推导了不同反射回波信噪比下,相参合成参数估计及合成性能理论边界。北理工团队还进一步提出步进频体制的宽带多雷达相参合成方案,来降低对时间相参合成参数估计精度的要求[28—30]。此外,文献[76]还讨论了滤波器网格失配对相参合成参数估计的影响,提出联合全局-局域搜索和基于稀疏傅里叶变换的解决方法。
4.2.2 开环架构下的相参合成参数(孔径位置)测量和偏差标定
开环架构下,相参合成参数通过对孔径位置测量或位置偏差标定获得。由于相参合成参数是一个相对值,在远场条件下仅需要对孔径间距和相对方位进行测量。相较于孔径间相对方位测量,相参合成对间距测量要求的精度更高。文献[16]分析得出,在无其他误差时,要使相参合成增益损失有90%的概率不低于0.5 dB,需要孔径间距估计标准偏差低于λ/15。若进一步考虑无线频率传递的误差,要求将更为严格,需低于λ/26[77]。借助光学测距,可达到厘米级及以内的测量精度,但需要额外配备精确的指向和跟踪硬件。
若采用微波测量的方式,由于测距精度与发射信号的有效带宽β的平方成反比,可通过最大化β2来最小化测距方差。最优的方式就是将波形能量集中在频带的边缘,即发射频谱稀疏的双音波形,其有效带宽甚至大于频带全填充的线性调频波形[78],但稀疏双音测量会带来模糊的距离量测。除交替发射的无模糊波形辅助解模糊外[79],文献[78,80]还设计多脉冲双音步进频波形,在原有双音基础上以双音间隔 1/N的频率步进发射脉冲,将模糊数减少为原来的1/N,并利用波形频率上的稀疏性特点,能在不干扰的情况下实现多孔径间距的同时、等带宽测量。
除直接测量外,利用固定参考点以时差定位的原理,对孔径名义上的位置(低精度,有偏差)进行偏差标定是获得孔径精确位置的另一种方式[81]。文献[82]基于位置固定已知、多普勒域可分的多参考点,讨论了机载分布式孔径平台位置误差的可辨识性及不可辨识的病态观测几何,后续补偿标定的偏差就能在指定方向合成波束,如图13所示。进一步,还给出基于特显点[83]和强杂波[84]的孔径位置偏差估计方法。
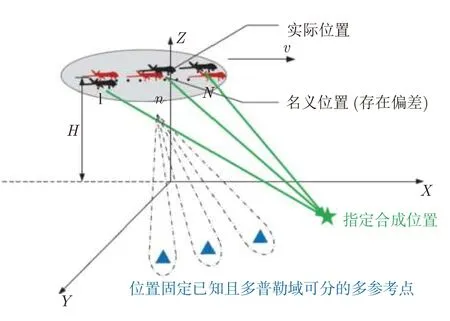
图13 基于位置固定已知多普勒域可分的多参考点对孔径位置偏差标定Fig.13 Aperture position bias calibration based on multiple reference points with known fixed position and resolved in the Doppler domain
4.2.3 时变合成场景下的相参合成参数追踪预测
一旦合成目的地与孔径间存在相对运动,孔径相参合成将变得更为复杂[18,85]。除补偿原有的相参性退化来源外,还要额外补偿由于相对运动引入的孔径间差分多普勒,也就是要预测补偿固定相位外的线性或非线性变化量。记合成目的地的参考起点为A,对应的时刻为t0。任意t时刻,合成目的地运动到B点,传播路径差变为R2(t)-R1(t),对应的差分多普勒为
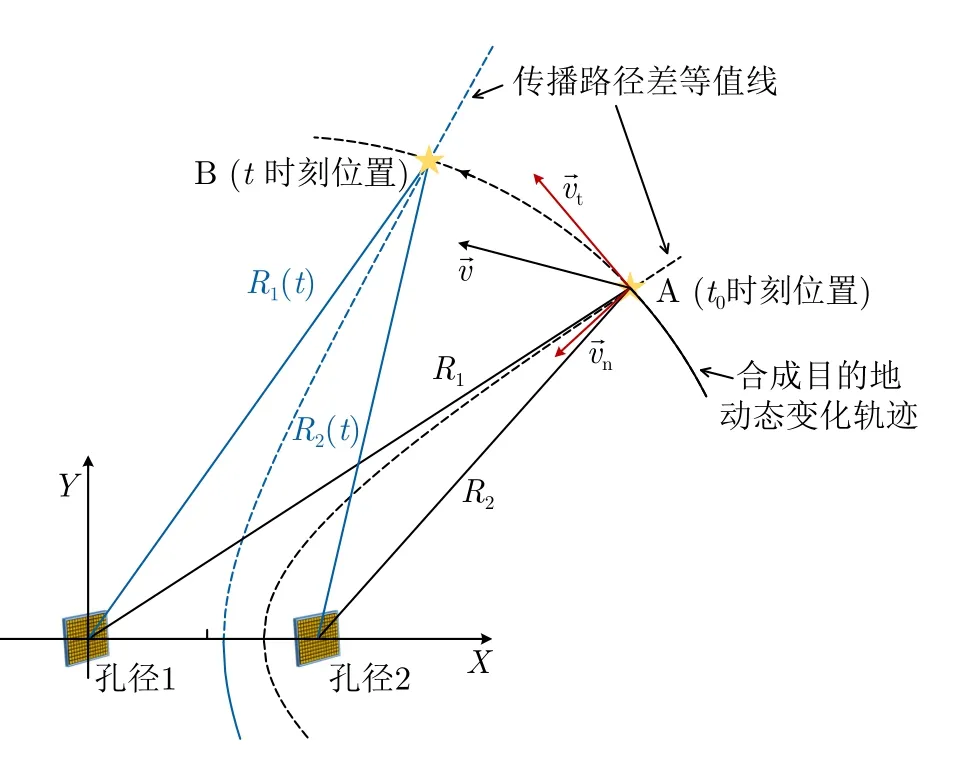
图14 合成目的地动态位置导致孔径间传播路径差改变Fig.14 Dynamic positions of coherent combination destination lead to changes in propagation path difference between apertures
对这样一个预测问题,一般的解决方案是建立精确的合成目的地随时间的演化的动态模型,并设计递归的状态Bayesian预测器,实时地将观测结果与演化模型进行统计融合。在文献[35—38]中,合成目的地选定为星历精确已知的卫星和月面,由于孔径精确位置已知,根据轨道动力学知识和几何关系就能精确预测频差来去除差分多普勒。
然而,一般很难获得合成目的地运动规律的精确先验,尤其合成目的地是非合作的。文献[31]认识到差分多普勒源于时变的相位差 ΔΦ,这是一个相对量。ΔΦ可直接由孔径接收目的地处的反射信号相关后鉴相获得,无需精确已知合成目的地的精确运动规律。只要鉴相序列是非缠绕(unwrapped)的,就能从中拟合出 ΔΦ随时间变化的规律,进而外推预测孔径间差分多普勒。研究进一步推导出能正确解缠绕的条件,并选定运动的弹道导弹作为固定双雷达孔径的合成目的地设计仿真实验。实验清晰地揭示相对运动引入的孔径间差分多普勒(相位差 ΔΦ的非线性变化),以及存在的鉴相序列缠绕及解缠,见图15(a)。经预测外推后 ΔΦ的绝对偏差明显下降,在整个导弹的飞行时间段内,绝对偏差均小于10°,表明孔径间的差分多普勒很好地得到了补偿,见图15(b)。

图15 合成目的地运动带来的时变相位差 ΔΦ及外推预测补偿[31]Fig.15 Time-varying phase differences ΔΦ due to combination destination motion,and extrapolation prediction for compensation[31]
5 总结和展望
本文总结概述了分布式孔径相参合成的概念、挑战及实现架构,从导弹防御、遥测遥控、超远距离雷达探测和射电天文多领域回顾其具体的发展应用现状,并对相参合成面临的共性问题及解决关键技术进行全面的综述介绍。总体而言,分布式孔径相参合成概念源于应用中高信噪比需求受成本、工程实现性等因素的限制,无法继续以增加功率孔径积来实现的现实问题,转而以“积少成多”合成的思路实现信噪比增强。其核心是通过精细调整分布式孔径间收发信号的时间和相位获得比拟于大孔径信噪比,并兼具机动性和经济性等优势。本质上,分布式孔径相参合成是传感器协同的一种高级形态,孔径间数据联合处理在射频信号上进行,故需要高精度的时频同步、高速大吞吐量通信传输等辅助技术的支撑。
就目前公开的研究开看,相参合成的孔径大都是地基固定式的。未来,随着同步、数传技术的发展,孔径相参合成也将拓展到天基、空基等这些本身受限于平台大小,提升信噪比方式单一的运动平台上。再加上具体应用需求的变化发展,分布式孔径相参合成仍有诸多需要深入和继续延伸研究的问题。
5.1 面向实际分布式孔径相参合成应用的精细化建模及工程化实现
在实际分布式平台上实施相参合成是一个困难的问题。引起分布式孔径间相参性退化的原因,除本文提到的源于同步误差和传播路径差的主要因素外,还存在其他因素并未明确或更深入地得到分析和解决,如:大气差异、信道衰落、多径以及孔径间的干扰等,导致“孔径到孔径”和“孔径到合成目的地”的信道存在不确定性。动平台相参合成更是增加了难度,运动平台的振动、旋转还会带来精确位置估计的困难,甚至是信号极化的改变等。同时,在时频同步方面,当前时频传递方案大都是中心化的,由主节点向从节点传递,但面对集群孔径的相参合成需求,中心化的方案将对通信吞吐量有额外的要求,且降低了系统的容错性[86,87]。此外,较直接射频处理,基于光子学产生、传输、控制和处理微波信号,在频率灵活性和相位噪声稳定性上已展现绝对的优势[88—90],有望能解决传统微波系统远距离节点间维持高相参时频以及宽带信号真延时的困难。
5.2 合成目的地在近场的长基线分布式孔径相参合成
为获得高角度分辨能力,分布式孔径常呈现公里及数百公里量级超长基线的特点,这或将导致探测目标位于近场[91]。理论上,远场条件并不是收发相参合成的必要条件。分布式孔径在远场相参干涉合成将形成条纹,在近场则形成重复、闭合有界的干涉斑[92,93]。2021年,NASA和JPL在实现长基线(12 km) C波段(7.15 GHz对应波长约0.04 m)在月面上的发射相参合成[94,95]。已知地月距离为380000km。根据远场计算公式:3.8×108<2×(1.2×104)2/0.04=7.2×109,也就是说实验在近场条件下进行。尽管NASA和JPL的实验已经说明非远场条件下的发射相参合成是可行的,但其实施难度远高于远场。原因在于,远场条件的平面波假设只依赖角度信息就能实现干涉峰值的任意偏置,而近场条件则需要各站到目标的距离,如:2站需要已知2个变量,3站需要已知3个变量。
5.3 从分布式相参孔径合成到分布式相参孔径的不同应用探索
分布式孔径相参合成的核心是将分布的孔径调整为相参的,合成仅是分布式相参孔径的一个应用。林肯实验室就将两部分置且工作频带不同的宽带雷达,通过频谱外推和超宽带相参处理技术,对不同频段的数据进行相参合成处理,形成超宽带雷达图像,极大改善了目标的识别能力[96]。此外,分布式相参孔径的等效大孔径和多节点自由度还带来抗干扰优势,比如:将主雷达孔径面临的主瓣干扰变为分布式系统的旁瓣干扰,以对消的方式解决传统自适应波束形成方法对主瓣干扰零陷导致主瓣畸变的问题[97,98]。除抗干扰外,分布式相参孔径还能提高角度估计和分辨能力,特别适合米波雷达本身受波长约束角分辨率低,架设大孔径天线成本较高且实现困难等问题。但同时分布式孔径的稀疏布置会产生大量的固有栅瓣,导致测角模糊。未来的研究可围绕时相、角度、频率、极化多维度电磁采样相参合成,分布式相参孔径协同抗干扰,稀疏长基线阵列多目标无模糊精确测角/定位等场景,开展更为多样化的分布式相参孔径应用探索。
利益冲突所有作者均声明不存在利益冲突
Conflict of Interests The authors declare that there is no conflict of interests