基于肌肉协同的表面肌电通道选择方法
2024-01-01周雕周建华宗静张琪伏云发


摘要:将不同肌肉对运动任务的贡献度作为最优通道选择的优化准则,提出了基于肌肉协同(Muscle Synergy,MS) 的通道选择方法。首先对原始肌电信号进行预处理,提取时域特征,然后使用非负矩阵分解(Non-Negative Matrix Factorization,NMF) 算法分别对每个手势动作提取肌肉协同矩阵并进行转换;再将每个手势动作在各个肌电通道上的肌肉权重系数进行求和, 得到所有肌电通道的重要性系数; 最后通过支持向量机(Support Vector Machines,SVM)、随机森林(Random Forest,RF)、K 近邻分类器(K-Nearest Neighbor,KNN) 进行分类。采用Ninapro 数据库中DB5 子数据库记录的表面肌电信号对该方法进行测试,测试结果表明,提取10 个最优通道时,与以往研究中提出的顺序前向选择(Sequential Forward Selection,SFS)、马尔可夫随机场(Markov Random Field,MRF) 和Relief-F 通道选择方法相比,本文方法确定的肌电信号子集获得的识别精度与MRF 和Relief-F 方法相近,比SFS 方法略低,但计算成本比它们均低。
关键词:表面肌电信号;肌肉协同;通道选择;手势识别;非负矩阵分解
中图分类号:TP391 文献标志码:A
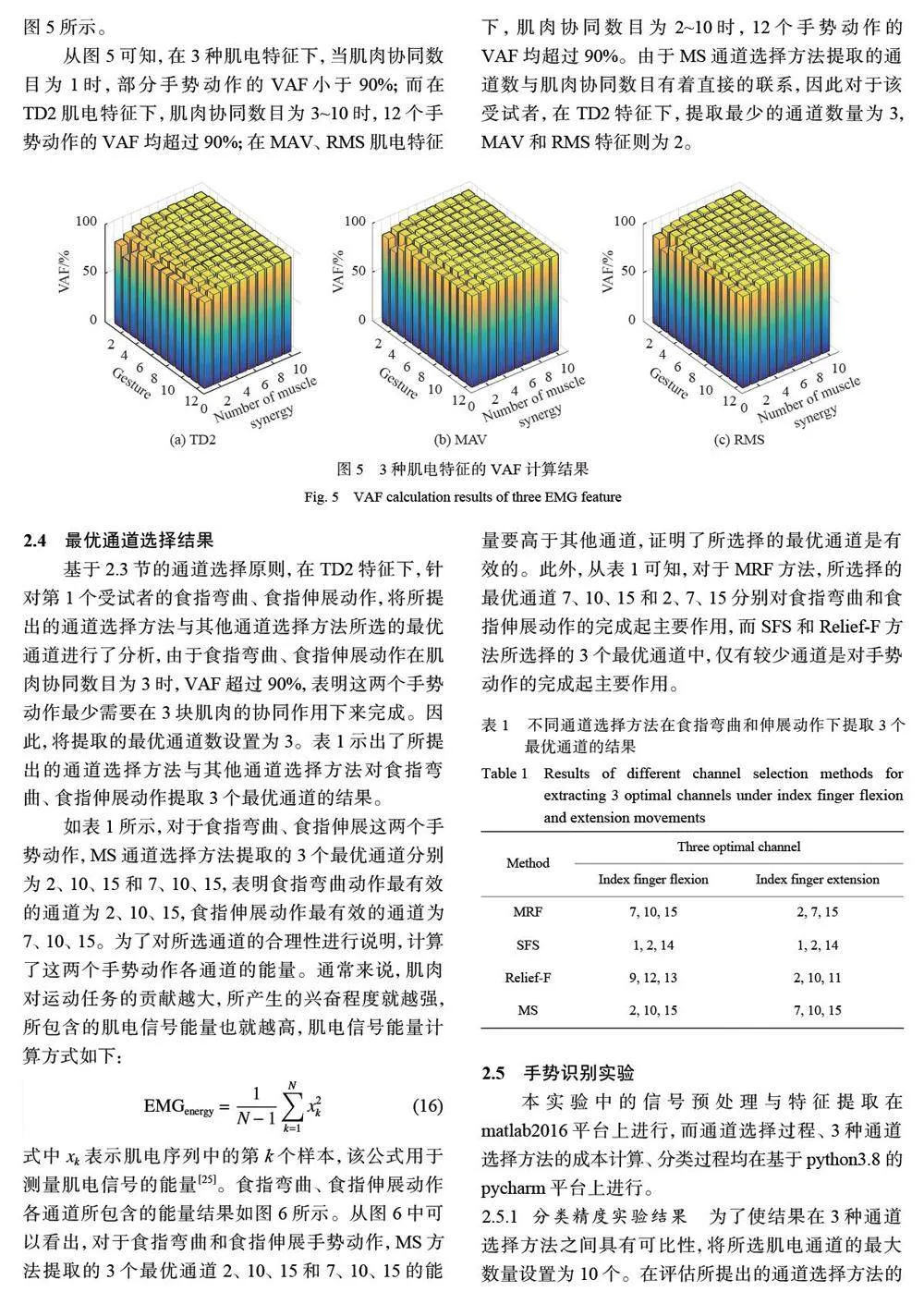
表面肌电信号(Electromyography,EMG)作为一种电生理信号,可以反映肌肉的兴奋程度,在手势识别、假肢、康复设备、远程控制机器人等领域中发挥着重要的作用[1-3]。
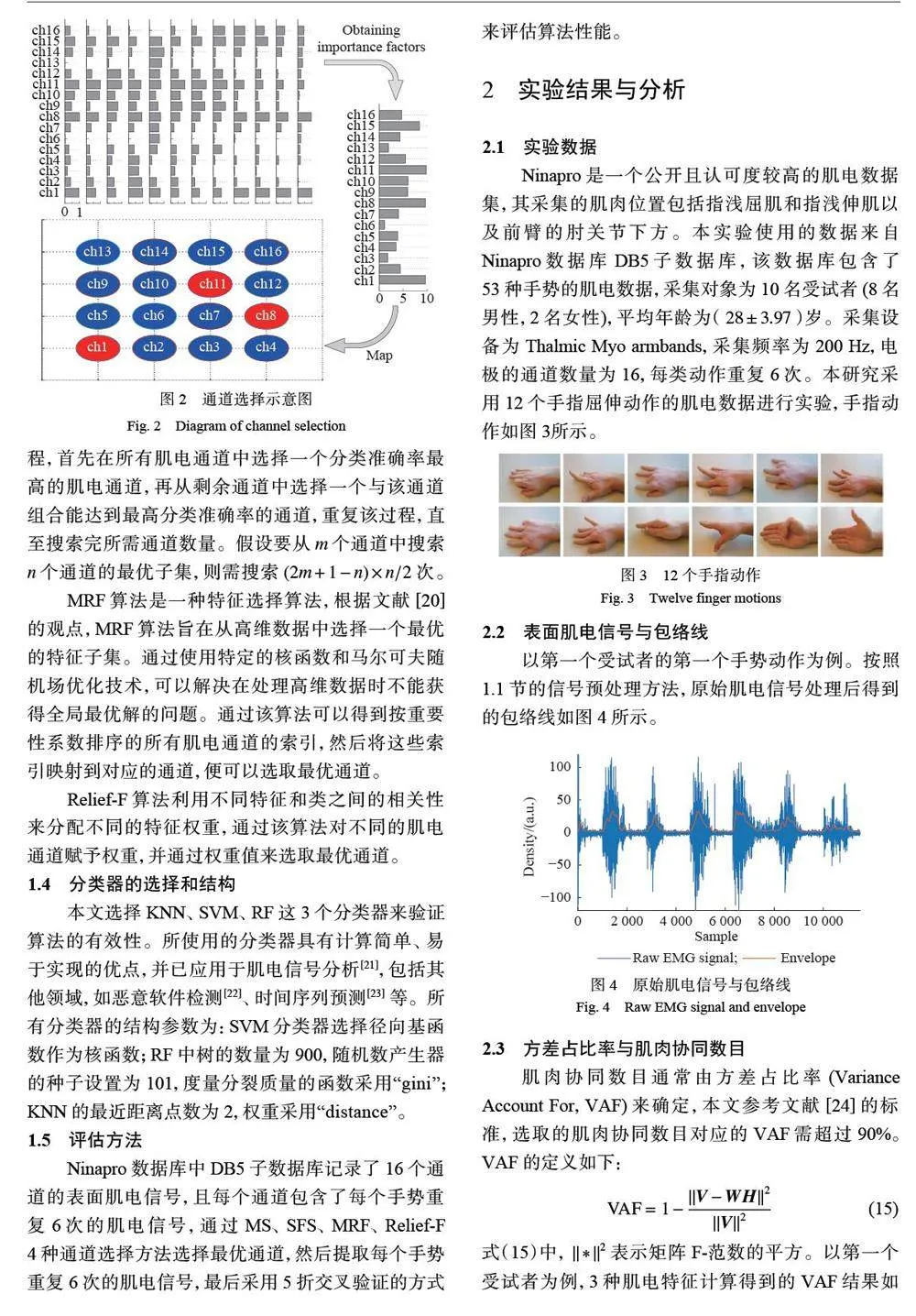
由于对生物信号进行分类时,分类的准确性很大程度上受到生物信号信息量的影响[4],使用更多的肌电电极可以捕获更多的电生理信息[5],故手势识别精度的提高往往需要增加肌电通道的数量[6]。但信道的增加不仅会造成较高的肌电控制系统成本,且增加了数据处理的负担,还会造成通道之间的信号串扰等问题[7],使得在实时肌电控制系统中不切实际。因此,选择适当数量的、具有理想分类性能的肌电通道是有必要的。
肌肉协同(Muscle Synergy, MS) 理论认为, MS是中枢神经系统控制肌肉骨骼系统完成各种运动的最小单位[8]。通过提取肌肉协同效应,可以估计肌肉骨骼系统完成各手势任务的最小单位,从而确定包含肌电信号信息量最多的肌电通道。
在肌电控制系统中,用于确定肌电电极数量和位置的方法有两种。一种是基于骨骼肌生理上已知的解剖知识[9-10],该方法对于骨骼肌功能完好的人,可以快速地确定肌电电极的最佳位置,但对于骨骼肌功能不完备的人来说,在进行肢体活动时,由于他们的肌肉收缩与正常人不同,以及肌肉的损伤程度、位置可能不一致,所以很难用这种方法来确定合适的电极位置。另一种方法则是基于一定的优化准则。在之前的基于肌电模式识别最优信道选择研究中,Qu 等[11] 将Relief-F 算法应用于最优肌电通道选择,从8 个肌电通道中选择了4 个最优通道, 获得了99.53% 的手势识别准确率。Huang 等[12] 使用了一种基于顺序前向选择(Sequential Forward Selection,SFS)的电极通道选择方法,该方法在大量降低电极通道的同时,其分类精度仅比使用其他电极通道时降低1.2%。但该方法以高分类精度为优化目标,需对肌电通道进行反复搜索,直到得到要求数量的通道,花费的时间较长。此外,该方法在选择最优通道时,主要依靠分类器的重复实现来完成,相对于其他通道提取方法,搜索最优通道的时间对分类器的模型复杂度较为敏感。Liu 等[13] 使用了马尔可夫随机场(Markov Random Field,MRF) 方法来进行最优通道选择,使用K 近邻(K-Nearest Neighbor,KNN) 分类器对所选通道的特征进行分类。该方法可有效减少不同通道的冗余信息,且获得了与使用所有肌电通道相似的高分类精度,但也存在计算成本较高的问题。