植保无人机在水稻病虫害防治应用中的对策研究
2024-01-01蒋小波
摘 要:为了深入研究无人机在水稻病虫害防治中的规律,致力于推动无人机植保技术的不断改进和提升,减少农药用量,提高水稻植保质量。在乡村振兴战略的大背景下,依托合作企业和无人机应用技术专业,以植保无人机技术为研究对象,明确研究思路,制定具体的研究对策。通过实践探索,成功研发出适用于湖南省主要农作物水稻的高效植保无人机作业方案和植保无人机操控技术。
关键词:无人机植保;水稻防治;病虫害
中图分类号:S635 文献标志码:B 文章编号:2095–3305(2024)05–00-03
我国是农业大国,各类农作物的高质量产出为国民提供了生活保障。为了提高农作物的产量,需要提高农作物的防虫防病率,使用传统方法进行病虫害防治时,喷洒处的农药只有大约1%沉积到植物靶标上,大部分农药在地面上流失,喷洒农药有效利用率仅为20%~30%,为了达到防治效果,必须大量喷施农药,造成了大部分农药浪费和环境污染[1]。
为了提高农作物的植保质量,2016年湖南省印发了《湖南省农药使用量零增长行动实施方案》,提出了“公共植保、绿色植保、科学植保”的理念[2]。党的十九大提出“乡村振兴战略”“深化农业供给侧结构性改革,走质量兴农之路”“坚持人与自然和谐共生,走乡村绿色发展之路”[3]。目前,我国在植保机械技术方面仍然存在较大的发展空间。数据显示,我国植保器械中,手动施药器械占比高达78%,中小型机动植保机械占比20%,而拖拉机配套喷雾机仅占2%。施药方法仍然以大容量、粗放为主,然而采用先进的植保器械和低容量施药技术可以有效减少药液流失,提高农药的利用率。
为了提高植保效率,我国植保技术逐渐向地面和航空植保机械方向进行研究。2017年农业农村部印发《关于开展农机购置补贴引导植保无人机规范应用试点工作的通知》,提出促进植保无人机规范应用,促进农业供给侧结构性改革[5]。
湖南省地形多样,包括山地、丘陵等复杂地形,传统地面机械难以进行植保作业。因此,发展植保无人机技术势在必行。植保无人机具有作业效率高、单位面积施药液量小、无需专用起降机场、机动性强等优势。2021年12月,农业农村部农机化司对湖南省2017年的植保无人机试点工作进行了评估,评价组对湖南省的实施情况给予了高度认可。
湖南省虽然在植保无人机技术方面已经取得了一些成果,但其在广大的农村地区尚未得到广泛应用,仍处于探索阶段。目前,面临着一些亟待解决的问题:首先,植保无人机价格昂贵,操作难度大,缺乏懂农业的专业操作人员;其次,缺乏针对低空低量高效施药的配套技术,施药参数缺乏科学依据;最后,湖南省农村田块分散,固定翼飞机施洒农药并不适用。
为了助推乡村振兴,娄底职业技术学院特别开设了无人机应用技术专业,于2022年下半年开始招生。致力于培养从事无人机生产、装配调试、维护维修、无人机植保应用等多方面技能的复合型人才,同时不断探索植保无人机的应用技术。
在乡村振兴战略背景下,以合作企业、无人机应用技术专业为依托,以植保无人机技术为研究对象,通过实践研究总结出适应湖南省主要农作物水稻的高效率植保无人机作业方案和植保无人机操控技术。通过研究,找出无人机植保在水稻病虫害防治中的一般规律,以此促进无人机植保技术的改进和提高、减少植保所需药剂的用量、提高水稻植保质量。
1 国内外研究现状和发展动态
植保无人机主要由飞行平台、飞控系统、喷洒系统3个部分组成。目前,植保无人机技术的研究热点主要集中在无人机作业方案和无人机控制技术等方面。
1.1 无人机作业方案的研究现状
无人机作业方案包括无人机飞行高度、飞行速度、喷幅宽度、喷雾流量等内容。在喷雾系统研究领域,美国在20世纪60年代率先将静电喷雾搭载于大型有人驾驶飞机的农药航空作业。20世纪末,Carlton获得了航空静电喷雾系统专利。但由于美国农药标签规定施药量与静电施药量不一致,导致其使用成本过高,限制了该技术在美国的发展。
英国研究了转盘式静电喷头,日本制作了微型锥孔旋转喷头、弥雾喷头,这些科研成果均推动了静电喷雾技术的发展。国外还开始采用CFD模拟技术建立了三维喷雾模拟并研究喷雾雾滴漂移特性。
我国静电喷雾技术起步于20世纪70年代,研究较早的有江苏大学、南京林业大学、中国农业大学、华南农业大学等相关科研院校,在地面植保器械静电喷雾系统、无人机静电喷雾系统等相关领域均有突破性的进展。
1.2 无人机控制技术的研究现状
目前,国外针对无人机系统控制技术研究已经取得了许多成效,Johnson等提出了可靠自主控制技术;Ward提出了无人作战飞机智能自主控制;Cheng认为模型预测控制MPC可以提高UAV自主水平;Reichard等研究了自主控制的智能态势感知。
国内对无人机系统相关技术的研究起步较晚,主要解决了飞行控制问题,平台的自主能力不强,其中,周锐等[6]提出了无人机分层式智能控制结构;张新国等[7]探讨了不确定环境下自主飞行控制面临的挑战;王宏伦等[8]阐述了无人机自主飞行控制系统组成等。
总的来说,国内外已有自主控制水平普遍不高,缺乏对不确定事件的感知、判断与处理能力,只能实现无人机系统在相对确定环境下的自主或半自主控制,目前尤其是植保无人机自主控制技术尚不成熟。
2 研究内容
湖南农村水稻病虫害问题一直是影响其水稻产量的关键因素。从以往的经验来看,常见的病害有稻瘟病、纹枯病、卷叶螟等,主要害虫有稻飞虱、卷叶螟等。为了有效防治这些病虫害,减少农药残留,团队主要从以下2个方面进行研究:
(1)稻田对比试验,获得最佳植保无人机作业方案。通过湖南水稻的农药喷洒作业试验,深入研究植保无人机作业方案。通过比较试验,获取相关技术参数,总结植保无人机飞行高度、飞行速度、喷幅宽度、喷雾流量等技术参数,对病虫害植保效率和效果的影响,从而确定适合不同情境的最佳植保无人机作业方案。通过实践研究,获得植保无人机技术参数选择的数据库。
(2)实践研究,制定植保无人机操作规范。通过对湖南农村山地、林地等典型田地的农药喷洒作业试验,深入研究植保无人机操控技术,包括规划飞行路线、自动定高、自动避障等操作技术,通过实践研究制定植保无人机操作规范。
3 研究对策
3.1 充分调研,确定研究方案
通过对合作企业和农户的调查研究,搜索、整理湖南省植保无人机技术应用的相关文献,了解目前湖南省植保无人机技术应用现状和亟须解决的问题;调查植保无人机作业方案、植保无人机操控技术在植保领域的应用情况和发展前景,通过比较研究,确定最佳研究方案。团队通过对湖南农村典型稻田开展农药喷洒作业试验,比较每次试验参数对作业效果的影响;通过多次对试验参数的调整和试验测试,验证参数调整的可行性和合理性。
3.2 因地制宜,确定研究手段
本项目通过对湖南农村山地、林地等典型田地的农药喷洒作业试验获取经验数据。合作企业在植保无人机技术的研究和应用已有一定基础,积累了丰富的经验和现场参数,为植保无人机技术研究相关的初始条件和初始参数的确定提供了依据。植保无人机技术已经在平原地区得到了广泛应用,效果良好。
由于湖南省田地分散,诸如山地、林地等复杂作业环境。本项目采用试验测试法进行技术参数的分析和调整,提高植保无人机技术的适应能力。团队主要采取以下手段进行研究:(1)设计试验技术参数:以企业原始数据为基础,设计多组试验用技术参数,包括喷洒量、喷嘴型号、飞行高度、飞行速度等技术参数。(2)检测试验结果。在不同试验条件下,检测叶面上的有效沉积量,确定植保效果;检测植保所用时间,确定植保效率。(3)综合分析。分析技术参数对试验结果的影响和总结研究成果。
4 研究实施
4.1 研究条件
4.1.1 试验条件
项目负责人所在学校是湖南省示范性高职院校,其智能制造专业群为省级一流特色专业群。其中,无人机应用技术专业建设有无人机组装与调试实训室、无人机行业应用实训室、无人机飞行操控实训室,为本项目理论与实践研究提供了实验设备和研究平台。
4.1.2 合作企业
合作企业为无人机应用专业合作企业,具备无人机生产、销售、培训、技术支撑与服务、检测的能力;也为区域内农林作物提供病虫害防治的专业化服务,同时运用农业大数据,为本项目提供了农业数据和理论基础,为本项目的实践研究提供了可靠样本。
4.2 病虫害分析
4.2.1 水稻病害分析
水稻的重要病害包括稻瘟病和纹枯病等,它会危害水稻的叶片、茎秆和稻穗,使水稻生长受阻,产量减少50%以上,严重的话还会导致水稻整株枯死,甚至颗粒无收。
4.2.2 水稻虫害分析
水稻的主要虫害有稻飞虱、卷叶螟等。稻飞虱主要危害水稻的叶片和茎秆,使水稻叶子干枯,稻株长不高,严重的话还会导致水稻整株枯死。卷叶螟会让水稻的叶片卷起来,影响光合作用,导致水稻生长受阻,产量下降。
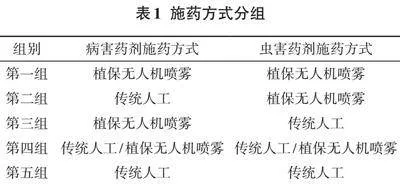
4.3 试验分组与实施
团队首先将农田按施药方式分为五组对照(表1)。
5 研究分析与结论
团队主要针对稻飞虱和卷叶螟进行调研和分析,分别在施药的节点时间通过目测观察试验药剂对病虫数量的影响,从而得出相应的防治效果。
5.1 对稻飞虱的防治分析
团队在不同组的试验农田分别选择采样点10处,于施药前3 d,施药后3 d、7 d进行采样。每次采样选出采样点2株水稻,通过拍击稻株的方式,将稻飞虱拍落至事先准备的容器。统计掉落的稻飞虱,再计算虫数的减退率,再用1组的虫口减退率与其他不同对照组进行比较,通过计算校正防效,判断无人机植保能否取得更好的防治效果[9-10]。
团队以第1组稻飞虱的防治为案例进行分析发现,当施药量为80%时,稻飞虱的防治效果最好,由此可以减少20%的施药量。但通过查询资料可知,有团队在做无人机植保时,可以节约农药50%,节约用水量90%。因此,下一个阶段还需要进一步减少农药用量进行试验,以达到最佳的防治效果。
5.2 对卷叶螟的防治分析
团队在施药后15 d和20 d,在不同组的试验农田分别选取100株水稻样本,采用5点取样法,统计束叶数,计算卷叶率。再通过统计分蘖数和绿叶数,计算保叶效果。
6 研究的创新与特色
本项目具有前瞻性,技术先进;研究成果具有应用性、可推广性。主要有2个创新点:
第一,针对湖南农村农药喷洒作业效率低、效果差的问题,提出了植保无人机技术应用的策略。采用植保无人机农药喷洒试验测试的方法,获取植保无人机技术参数和植保成效数据;通过对不同情境下多次试验的数据对比,分析植保无人机技术参数对植保效率和效果的影响,研究得出的基于植保无人机技术参数选择的数字模型,该数字模型对湖南农村田地的适应性强、稳定性好、误差小等特点,具有广阔的应用前景。
第二,针对湖南农村植保无人机操控难、成本高的难题,提出了一些植保无人机操作规范的策略。通过对不同情境下多次试验的数据对比分析,不断优化参数,总结植保无人机操作规范;采用操作植保无人机规范,能提高了工作效率,降低操作成本,缩短植保项目周期,有很强的实用价值。
7 结束语
随着无人机静电喷雾技术和无人机控制技术的更新完善,推动了植保无人机技术向高精度、智能化方向发展,但这些研究在植保无人机领域尚未形成完整体系,仍存在大量需要突破的空间。首先,在无人机作业方案中,飞行高度、飞行速度对农药喷施的作业实际效果影响较大,静电喷雾技术的应用干扰因素多且复杂,因此,需要通过实践研究获取最佳的飞行高度、飞行速度和静电喷雾方案;其次,市场上的植保无人机都是半自动类型的,中途返航换农药需要手动重新设置航线,而且,植保无人机一般只能适应简单的环境,一些山林和树林的地方很难作业,因此,在现有作业条件下和现有的无人机控制技术的基础上,完善无人机操控技术是另外一项课题。
参考文献
[1] 王亚涛.多旋翼植保无人机静电喷雾技术研究[D].杭州:电子科技大学,2019.
[2] 黄伟明,荀栋.洞庭湖生态经济区农药“零”增长的战略思考:以湖南省汨罗市为例[J].岳阳职业技术学院学报, 2016,31(2):61-65.
[3] 李慧.以乡村振兴战略引领城乡融合发展[N].光明日报, 2017-12-30(002).
[4] 化肥农药使用量零增长行动目标顺利实现[J].粮油与饲料科技,2021(1):51.
[5] 晓雨.吉林未来三年植保无人机试点要这么办试点产品实行定额补贴单机补贴1万5,实行年度调整[J].中国农机监理,2018(7):16-17.
[6] 周锐,吴雯漫,罗广文.自主多无人机的分散化协同控制[J].航空学报,2008(S1):26-32.
[7] 张新国,张汝麟,陈宗基.飞行控制系统设计方法研究[J].航空科学技术,1997(1):17-19,31.
[8] 王宏伦,王延祥,刘一恒.基于轨迹映射的无人机拖曳式空中回收轨迹优化[J].航空学报,2023,44(20):7-23.
[9] 牛轶峰,沈林成,龙涛.攻击型无人飞行器自主控制技术研究综述[J].系统工程与电子技术,2007(3):391-395.
[10] 朱华勇,牛轶峰,沈林成,等.无人机系统自主控制技术研究现状与发展趋势[J].国防科技大学学报,2010,32(3): 115-120.
基金项目:2022年湖南省教育厅科学研究项目“乡村振兴战略下植保无人机技术在湖南农村的实践研究”(22C1263)。
作者简介:蒋小波(1977—),男,湖南新邵人,副教授,研究方向为无人机应用技术。