火电机组调速系统引发的低频振荡分析及抑制措施研究
2023-12-30冯长有焦春雷裴建楠李明甫日甫才仁
冯长有, 焦春雷, 裴建楠, 李明, 甫日甫才仁
(1.国家电力调度控制中心,北京 100031;2.国网新疆电力有限公司电力科学研究院,新疆 乌鲁木齐 830001; 3.华北电力大学,北京 102206)
0 引 言
近年来,在发电机组送出系统中频发低频振荡,严重影响了电网和机组的可靠运行[1-2]。低频振荡的分析方法分为两类:负阻尼机理[3]和强迫共振机理[3-4]。其中阻尼转矩法应用于自治系统,而强迫共振机理应用于非自治系统。文献[5]分析得出汽轮机蒸汽压力脉动可以诱发机组低频振荡并利用仿真验证其正确性。在强迫共振类型低频振荡的研究方面,现有大部分研究主要集中在振荡源定位[6]和设备级定位[7]。文献[8]针对汽轮发电系统的振荡现象,符合强迫功率振荡特征,因此归类此次低频振荡为强迫功率振荡,并给出了相应处理方法。文献[9]指出单机无穷大系统的低频振荡现象属非负阻尼,可利用强迫功率振动理论解释。文献[10]指出局部振荡造成的区间功率振荡可通过右特征向量与发电机的功角特性进行分析研究。
本文针对西北某电厂多次出现的振荡现象,综合考虑同步发电机调速系统、励磁系统及其控制系统模型,详细分析了振荡原因和机理,推导出了机组各部分阻尼公式,给出了可行的振荡抑制措施,并通过仿真分析验证了措施有效性。
1 低频振荡现象描述
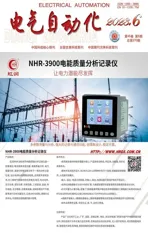
2020年8月17日—21日,西北地区某电厂发生多起低频振荡现象,其中以21日振荡现象最为严重,网架结构图如图1所示。当日该电厂2号机组(容量135 MW)有功功率于15∶46∶05∶480 ms开始振荡,最大振幅73.11 MW,振荡频率约为1.25 Hz;附近的某水电站3台发电机有功功率于15∶46∶08∶920 ms开始振荡,振荡频率约为1.25 Hz、1.84 Hz。其中:1号发电机有功功率最大振幅为2.69 MW,2号发电机有功最大振幅为2.56 MW,3号发电机有功最大振幅为2.85 MW,如图2、图3所示。附近电网中的输变电设备均发生明显振荡现象。

图1 网架结构图
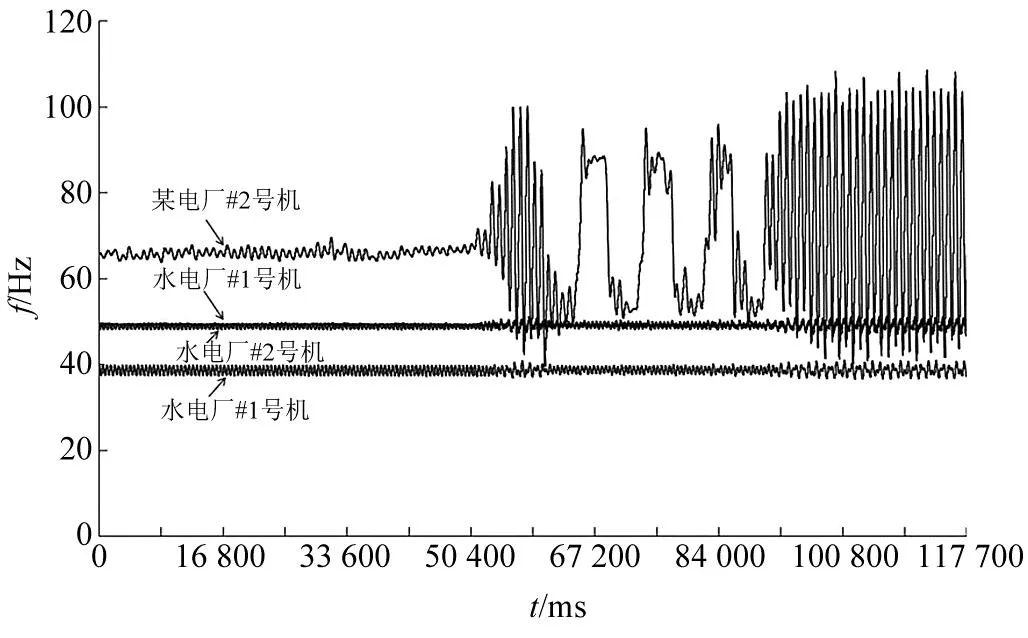
图2 电厂2号机及附近水电厂1、2、3号机功率曲线
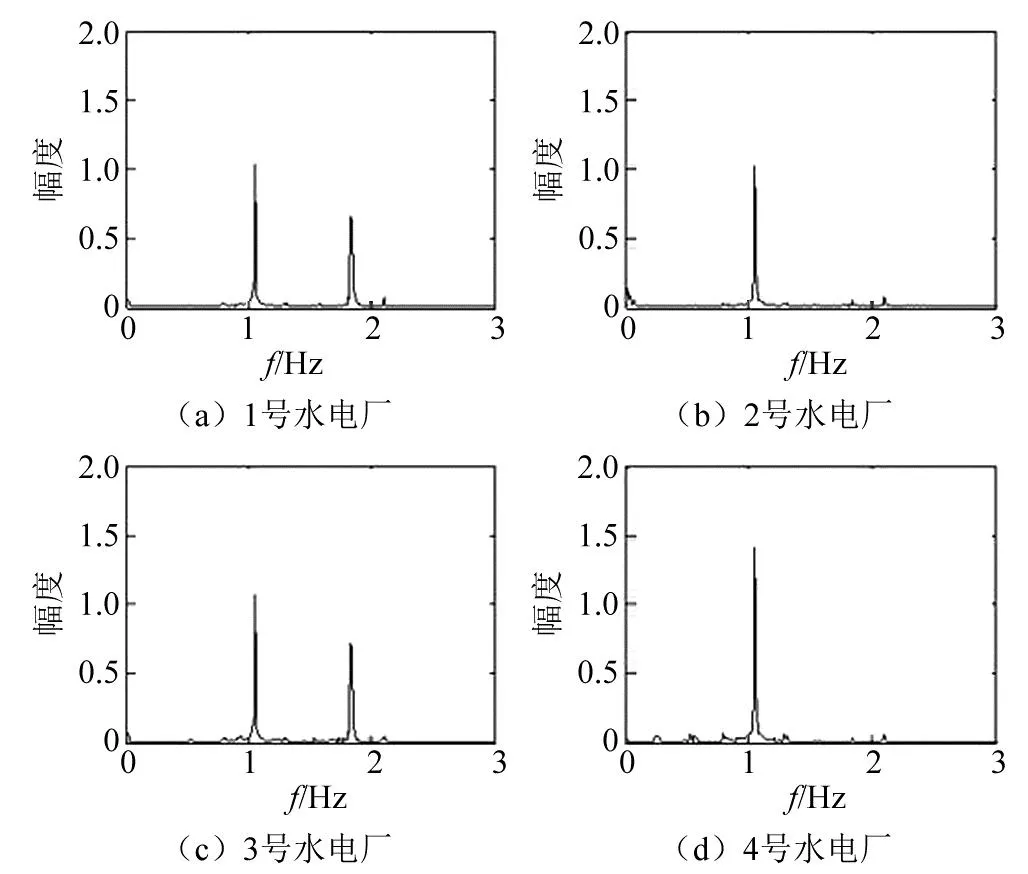
图3 机组频谱分析
由图2可知,该电厂机组振荡早于附近水电厂5 s开始,因此该电厂为本次异常现象的振荡源。开始振荡时幅值较小,随后振幅骤增,最后保持等幅振荡,在集控员退出AGC、协调控制、功率闭环和一次调频后消除。
由于低频振荡涉及机组调速系统及一次调频,因此在研振荡原因时,需要建立计及调速系统、励磁系统的详细分析模型。
2 机组各控制环节建模分析
2.1 调速系统模型
调速控制系统包括测速反馈和测功反馈、频差放大器、电液转换器和油动机四个环节,考虑限幅环节和死区对调速控制系统的影响,可建立传递函数框图,如图4所示。

图4 调速控制系统传递函数
为便于分析,对调速器控制模型作如下简化:忽略死区的影响;电液转换器和继动器的响应速度快,与油动机时间常数相比,响应时间可以忽略不计;将位移传感器设置为双向作用的单位负反馈。简化后传递函数为:
(1)
式中:KGOV、TGOV为调速器控制器比例与惯性的时间常数。
汽轮机模型如图5所示。图5中:TCH、TRH、TCO分别为汽轮机高压缸进汽室、锅炉中间再热器和低压连通管的蒸汽容积时间常数;FHP、FIP、FLP分别为高压缸、中压缸和低压缸三缸占整机的功率百分比。由于中间再热器的容积很大,造成中间再热蒸汽容积时间常数(TRH)很大,当外界负荷变化时,高压缸功率随之变化,而中低压缸受中间再热容积影响功率变化缓慢,可以忽略,汽轮机的传递函数可简化为一阶惯性环节:
图5 汽轮机模型
(2)
因此可以得到整个调速系统的传递函数为:
(3)
由此可以得到调速系统的小干扰模型,见图6。图6中:ΔPe、ΔPm分别为电磁功率和机械功率变化量。
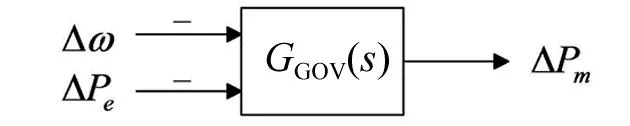
图6 调速系统 小干扰模型
2.2 励磁控制系统模型
电力系统稳定器(power system stabilizer, PSS)通过引入附加转矩加强系统阻尼来抑制低频振荡。本文采用文献[11]所述的简化励磁及PSS小干扰模型来分析低频振荡现象。图7为励磁系统模型,机端电压微增量ΔUG与参考电压微增量ΔUref进行比较,其差值通过励磁调节器形成励磁电动势微增量ΔEf,进而改变发电机励磁,实现电压调节。
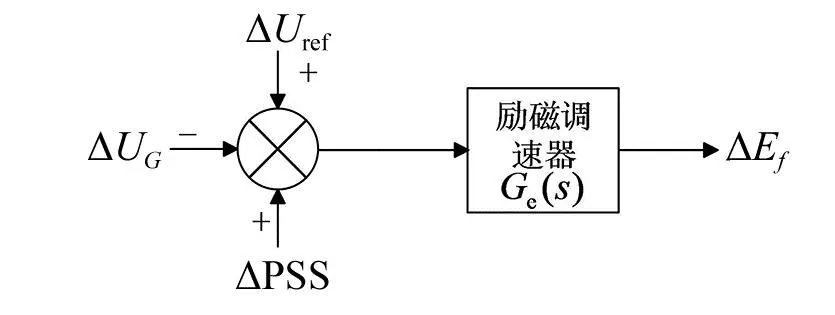
图7 机组励磁系统小干扰模型
可知励磁系统的传递函数Ge(s)为:
(4)
式中:KA为励磁控制器比例系数;TA为励磁控制器惯性时间常数。
机组PSS模型见图8,转速的微增量Δω信号分别通过PSS装置的陷波器环节和超前滞后环节,得到PSS的输出量ΔPSS,ΔPSS最后输入到图7励磁控制系统的比较环节处。可知,PSS传递函数GP如式(5)所示。

图8 机组PSS装置小干扰模型
(5)
式中:Tw为电力系统稳定器隔直环节时间常数;Kss为电力系统稳定器增益;T1、T2分别为相位补偿环节的超前时间常数和滞后时间常数。
3 机组低频振荡机理分析
由于此次振荡可判定为自治型低频振荡,故选用阻尼转矩法来分析。首先建立单机无穷大模型如图9所示,基于此利用小干扰模型理论,考虑第二部分励磁系统、PSS、调速系统的小干扰模型后构建低频振荡分析模型。
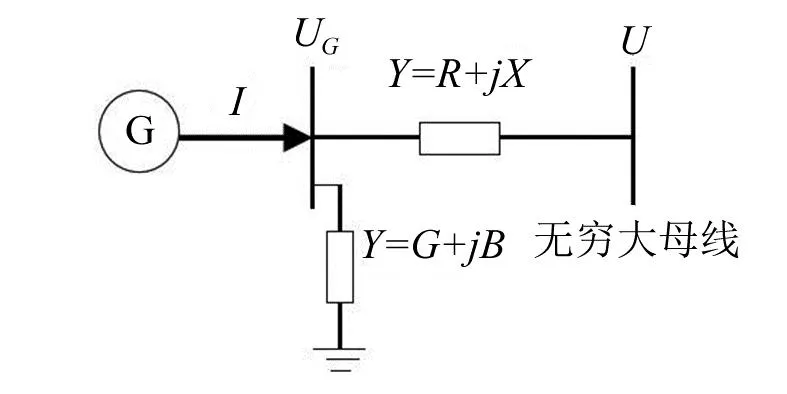
图9 单机无穷大系统示意图

(6)
(7)
(8)
发电机转子运动方程增量形式为:
(9)
式中:Δω、Δδ、ω0为转速微增量、功角微增量和转速基准值;TJ、D、ΔPm、ΔPe为机组惯性时间常数、阻尼、机械功率微增量以及电磁功率微增量。
式(6)~式(9)中相关参数计算公式如下:
(10)
(11)
(12)
(13)
(14)
(15)
(16)
YZ+1=C1+jC2
(17)

根据式(6)~式(9),结合本文第二部分所述机组各个控制环节小干扰模型,可得如图10所示计及机组各控制系统的低频振荡分析模型。其中:Ge(s)励磁环节的传递函数、Gov(s)为调速环节的传递函数;ΔUref、ΔUG、ΔPPSS分别为机端电压参考电压微增量、机端电压微增量、PSS环节输出量微增量;ΔPe2(AVR)、ΔPe2(PSS)分别为由励磁控制器产生的(PSS未投入)、PSS环节产生的功率微增量。
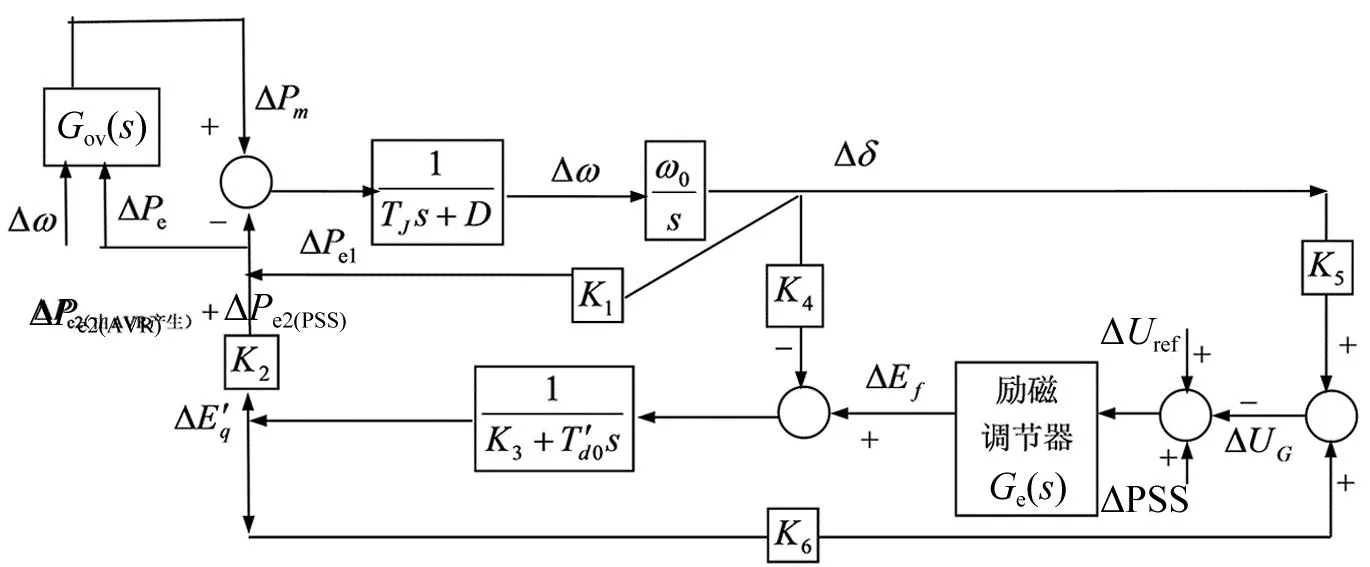
图10 计及机组各控制系统的低频振荡分析模型
根据图10可推导得出励磁、PSS、调速环节提供给系统阻尼系数DAVR、DPSS、DGOV。
(18)
DPSS=(GpdGxd-GpqGxq)
(19)

(20)
其中:
(21)
(22)
式中:MAVR为励磁系统产生的同步力矩系数;MPSS为PSS环节产生的同步力矩系数;ω0为频率基值;KA、TA为励磁控制器比例系数、惯性时间常数;Kδ为转速偏差放大系数;KGOV、TGOV为调速器控制器比例与惯性时间常数;Tw为PSS环节陷波器时间常数;T1、T2分别为相位补偿环节的超前和滞后时间常数;ωd为振荡角频率。
由式(22)可知:调速系统阻尼系数可能为负值,此时会产生负阻尼,阻尼水平与调速器参数有关,比例常数设置的越大,越易产生负阻尼;当机组高负荷运行时,即K1较大时,调速系统同样会产生负阻尼;当调速系统产生的负阻尼大于励磁系统和PSS装置产生的正阻尼时,容易发生低频振荡。因此,当机组因调速系统控制参数设置不当而引起低频振荡时,首先应当退出AGC、功率闭环、协调控制和一次调频,并根据振荡情况合理调减负荷,适当修正控制参数。
为了防止系统发生低频振荡,需满DAVR+DPSS+DGOV在整个频段均为正值,PSS装置经过试验调整后可满足DAVR+DPSS在整个频段为正,由此可知只需保障DGOV为正数可有效降低振荡发生概率,考虑一定裕度水平(取为0.8)后,可知调速器控制参数整定TGOV可整定为:
(23)
4 振荡分析
本次该电厂振荡原因是因为机组调频作用过强以及协调控制系统中汽机主控功率控制PID参数设置不合理所致,当电网频率出现超出死区的小幅振荡时机组调频过调节,引发低频振荡现象。该机组初始运行参数如表1所示。

表1 机组运行信息及控制参数
TGOV取0.11时,机组一次调频投退情况下系统总阻尼水平如图11所示。当调速器控制参数选者不合理时,投入一次调频后尽管增加了频率在0~1 Hz的系统阻尼,但却使系统总阻尼在1.25 Hz及以上时为负,特定情况下会导致低频振荡。退出一次调频后,系统负阻尼情况消失,此时相比于DEH阀位控制方式下,系统阻尼水平在0至0.5 Hz区间明显增强,在0.5 Hz及以上略微降低。
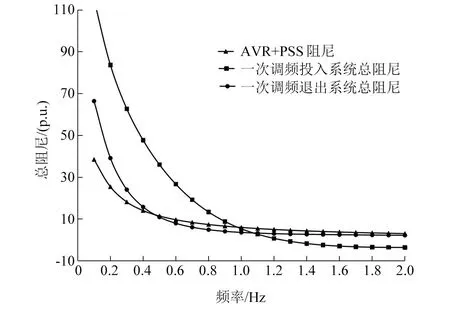
图11 TGOV为0.11时一次调频投退情况下系统总阻尼
机组一次调频投入时,不同TGOV下调速系统所产生阻尼及系统总阻尼见图12和图13。可知,随着调速系统控制器惯性时间常数增加,调速系统所产生的阻尼逐渐减小甚至为负,进而改变系统总阻尼水平。当TGOV为0.11时,系统阻尼水平在1.25 Hz处为负,并且随频率增加进一步下降,此时易发生低频振荡;当TGOV为0.07时,系统总阻尼在1.6 Hz处为负,并有进一步下降趋势,在特定情况时会引发低频振荡;为避免低频振荡发生,由式(3)~式(22)可知,机组调速器参数TGOV可优化调整为0.02。从图13可知此时系统在0~2 Hz范围内总阻尼最小值为4.65,不会产生低频振荡。

图12 CCS模式下一次调频投入、TGOV 不同时调速系统产生阻尼水平
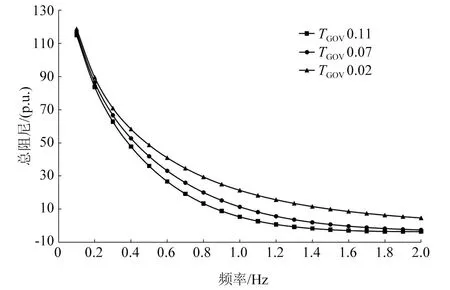
图13 CCS模式下一次调频投入、TGOV不同时系统总阻尼
综上可知:当控制参数不合理时,CCS模式一次调频投入方式下,TGOV越大系统总阻尼越小甚至为负,机组在特定频段易产生低频振荡,而且,TGOV越大,机组发生低频振荡频段越广。另外通过本文所提的调速器控制参数优化方法,可有效抑制低频振荡现象。
5 结束语
从本文分析可知,当机组调速系统控制器惯性时间常数的逐渐增大,会减小调速器产生的阻尼,并会进一步恶化系统的总阻尼水平;当调速器所产生的负阻尼大于励磁及PSS所产生的正阻尼时,电力系统将发生低频振荡现象。此时,发电机组最好设定退出一次调频并相应减少负荷,以改善系统阻尼水平。同时本文给出了调速系统控制参数优化调整方法,经实际机组分析结果验证了本文所提理论的正确性及所提抑制措施的可行性。