基于视频联动技术的智能水电站监测状态实时自动巡检方法研究
2023-12-30杨浩然
张 宇,杨浩然
(国能大渡河大岗山发电有限公司,四川 雅安 625400)
0 引言
智能水电站内电气设备数量较多,运行过程中,受到各方不确定因素的干扰影响,运行状态可能存在不同程度地波动[1]。一旦电气设备运行出现异常而得不到及时运维处理,会降低智能水电站运行的质量与效率,严重情况下,引发不可控的电力事故[2]。为了提高智能水电站运行的安全性与可靠性,需要采用科学合理的自动巡检方法,定期对智能水电站的各个电气设备进行巡检,判断智能水电站运行中是否存在安全风险隐患,实时展示智能水电站的运行状态变化[3]。现阶段,传统的水电站自动巡检方法在实际应用过程中,存在巡检周期较长、巡检结果与水电站实际运行状态偏差较大的问题。视频联动技术能够优化这一问题,充分挖掘水电厂内所有的视频监控系统资源,将其以无缝集成的方式,集成到控制系统中,能够起到节约巡检时间、降低自动巡检强度、提高巡检精度的作用[4]。基于此,在传统水电站巡检方法的基础上,本文引入视频联动技术,提出了一种全新的智能水电站监测状态实时自动巡检方法。
1 智能水电站自动巡检方法设计
1.1 视频与智能水电站联动
在本文设计的实时自动巡检方法中,首先,利用视频联动技术,对智能水电站与视频进行联动处理。通过视频服务器的高效运行,调控现场的摄像机,实时采集智能水电站电气设备监测状态相关图像,并反馈给发起请求的客户端。
本文设计的视频与智能水电站联动运行流程见图1所示。
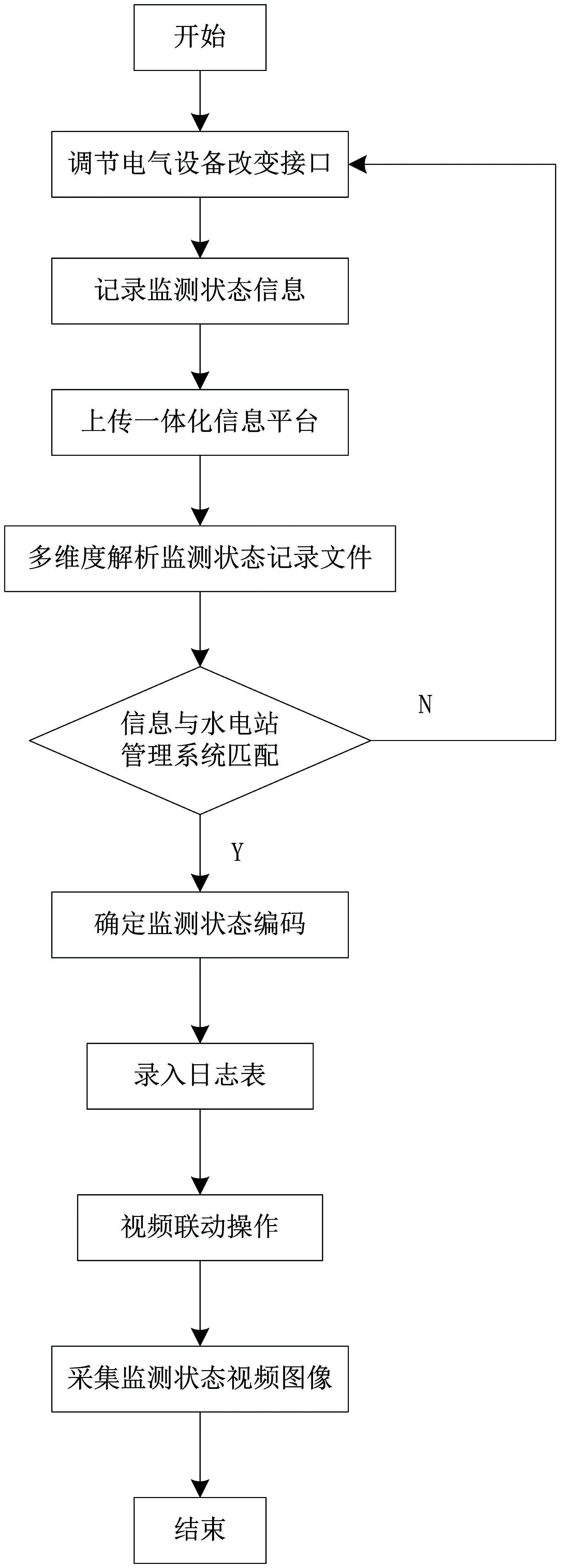
图1 视频与智能水电站联动运行流程
如图1所示,在智能水电站运行动作发生变化的前提条件下,调节电气设备的改变接口,记录与智能水电站监测状态有关的各项信息,并将记录的信息发送至智能水电站一体化信息平台接口,对监测状态记录文件进行多维度解析。其次,提取解析文件内的各项关键信息,包括电气设备运行动作、设备编号等,判断各项关键信息是否与水电站管理系统的信息匹配,进而确定智能水电站监测状态编码[5]。将编码录入到日志表内,量测智能水电站信息配置,获取监测状态巡检关键信息。通过视频与智能水电站联动业务处理模块,播放智能水电站运行状态视频,提取联动信息与监测状态图像,为后续自动巡检奠定基础。
1.2 监测状态视频图像识别
完成视频与智能水电站联动后,获取到智能水电站监测状态视频图像,接下来,对视频图像进行自动识别。首先,对智能水电站监测状态视频图像识别进行程序化设计,AD转换视频图像。其次,设定监测状态视频图像识别的主要参数,如表1所示。
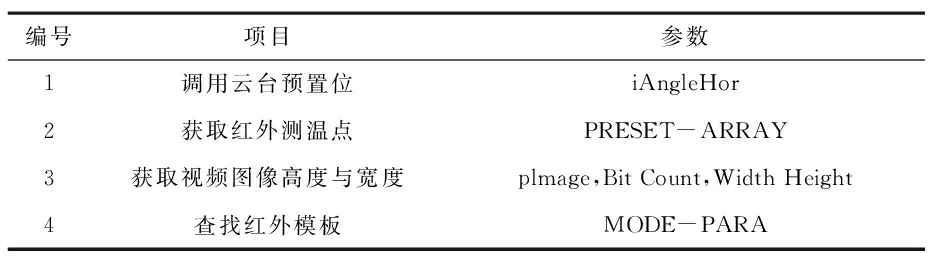
表1 监测状态视频图像识别主要参数
按照表1所示的参数,设计智能水电站监测状态视频图像识别模式。在此基础上,利用大视场模板,匹配识别视频图像目标,调整云台预置位,将视频图像目标标定到智能水电站视场中心,根据匹配识别结果,判断智能水电站运行状态。
1.3 监测状态实时自动巡检
基于智能水电站监测状态视频图像识别完毕后,初步得知水电站的运行状态。在此基础上,对智能水电站监测状态进行实时自动巡检。
本文设计的实时自动巡检流程,如图2所示。
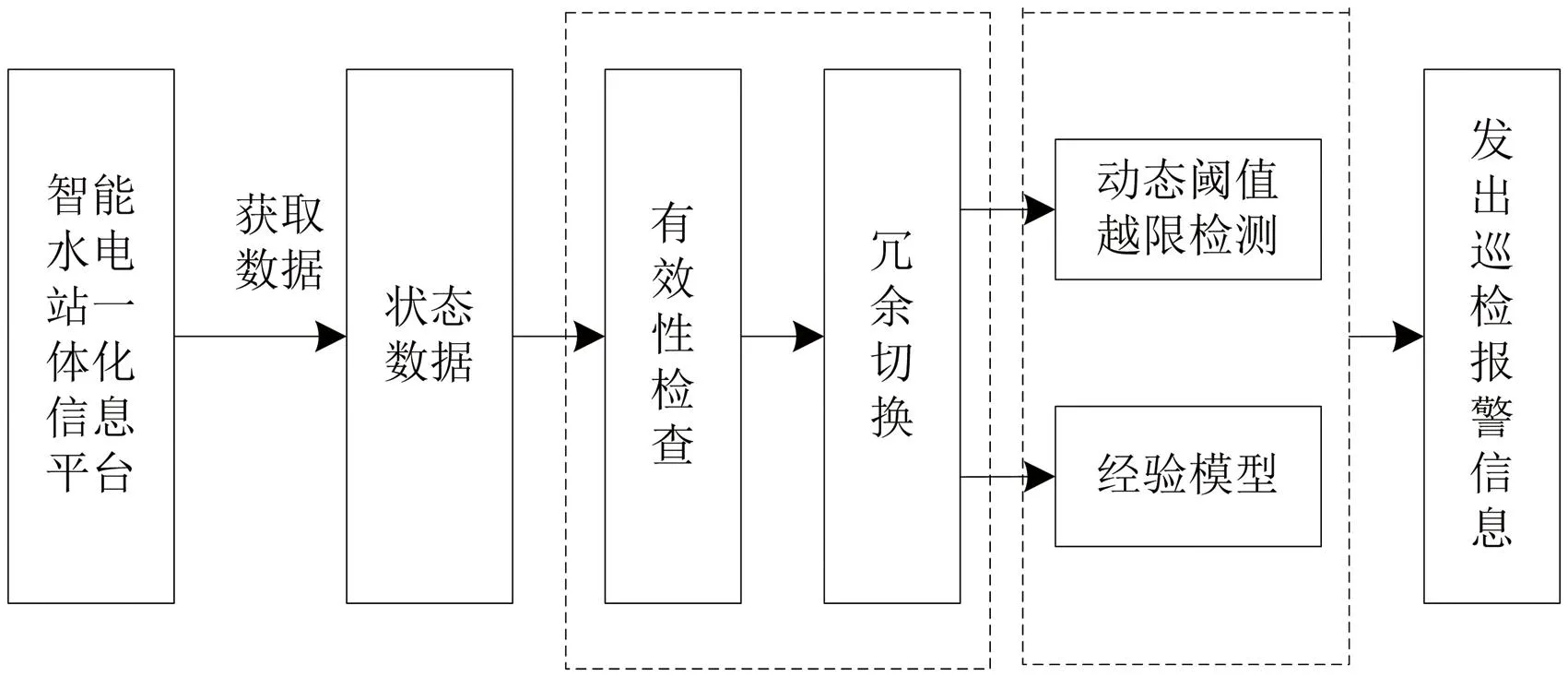
图2 监测状态实时自动巡检流程
如图2所示,利用智能水电站一体化信息平台的数据提取功能,获取实时自动巡检所需的状态数据X(i),基于状态数据有效性检查,实现状态数据的冗余切换,全方位地提高数据的可信度。其次,利用动态阈值越限检测方法,实时检测水电站是否存在异常运行状态,若存在则立即发出报警信息。在此基础上,依据经验模型,计算智能水电站监测状态实时自动巡检任务的性能指标S,公式为:
S=(S(X(T),X(T+1),…,X(N))
(1)
式中,T、N分别表示实时自动巡检任务开始、结束时刻对应的状态数据序号。根据S的越限与降低程度,发出相应的巡检报警信息,实现智能水电站监测状态实时自动巡检的目标。
2 实验分析
2.1 实验准备
为了验证上述提出的实时自动巡检方法的可行性,进行如下的实验分析。在自动巡检实验开始前,建立包含待巡检目标的智能水电站数据集,包括多种水电站电气设备,如表2所示。

表2 智能水电站电气设备说明
表2为本次实验使用的电气设备的编号与标注说明。为了保证实验的真实性与客观性,避免实验结果存在偶然性,数据样本采集选取了多个智能水电站场景与角度。搭建此次实验所需的自动巡检运行环境,如表3所示。
表3 自动巡检实验测试环境配置
按照表3所示的配置,建立此次实验测试环境,为实验顺利进行提供良好的保障。在此基础上,按照上述设计方法的自动巡检流程,巡检智能水电站的状态变化与运行工况,进而检验方法的可行性。
2.2 结果分析
将上述设计的基于视频联动技术的智能水电站监测状态实时自动巡检方法设置为实验组,将文献[1]、文献[2]提出的巡检方法分别设置为对照组1与对照组2,对三种方法的自动巡检结果作出全方位的客观分析,并对比。选取6种智能水电站电气设备监测状态实时自动巡检识别率作为此次实验的评价指标,其计算公式为:
Q=RM/R×100%
(2)
式中,Q表示自动巡检识别率;RM表示自动巡检识别正确的智能水电站电气设备数量;R表示自动巡检识别的智能水电站电气设备总数[6]。
自动巡检识别率Q值越高,说明水电站监测状态实时自动巡检结果与水电站实际运行状态的偏差越小,巡检精度越高,反之同理。利用MATLAB模拟软件,模拟整个自动巡检过程。总共进行10次自动巡检实验,取10次实验结果的平均值,并作出对比,结果如图3所示。

图3 智能水电站自动巡检识别率对比结果
通过图3的对比结果可知,三种自动巡检方法应用后,智能水电站实时自动巡检识别率结果存在较大的差距。其中,本文提出的自动巡检方法应用后,6种不同类型的智能水电站电气设备的自动巡检识别率明显高于另外两种方法,均达到了98%以上[7]。由此可见,提出方法的巡检精度较高,巡检效果更好。
3 结语
综上所述,为了改善传统自动巡检方法在智能水电站监测状态巡检工作中巡检周期较长、巡检结果精度较低的问题,本文引入视频联动技术,提出了基于视频联动技术的智能水电站监测状态实时自动巡检方法研究。通过本文的研究,有效解决了水电站内设备图像识别分辨率较低的问题,选择最佳巡检方案,实现了多张智能水电站监测状态图像稳定拼接的效果,全方位地提高了智能水电站自动巡检结果的精度与效率,具有良好的应用前景。