基于S7-PLCSIM Advanced的MCD转向臂与TIA通信仿真应用
2023-12-29黄雅迪欧彦江
杨 涛 黄雅迪 欧彦江 杨 旭
(成都工贸职业技术学院∕成都市技师学院电气工程学院,四川 成都 611731)
0 引言
随着机电一体化设备自动化程度的不断提高及控制点的不断增加,对机电一体化概念设计开展程序指令的仿真研究,有利于减少现场设备调试中的不合理问题,从而使虚拟仿真调试技术在工程中得到更多应用。S7-PLCSIM Advanced 高级虚拟控制器可创建西门子系列S7-1500 或ET 200SP 系列虚拟CPU,用于综合仿真研究,不需要真正的PLC也能创建程序,并可进行下载调试。机电一体化概念设计(Mechatronics Concept Designer,MCD)具有较高的集成性,能与S7-PLCSIM Advanced 建立通信,且能实现TIA、PLCSIM Advanced、MCD 之间的数据交换,实现综合虚拟仿真调试,在机电产品还没有实际制造出来前,就已经进行了功能和控制方面的验证。
目前,有多位学者对MCD与TIA仿真通信进行研究。卞志海等[1]对TIA V15与PLCSIM Advancedp之间的通信进行仿真调试。蔡文站等[2]把基于OPC UA建立的MCD与TIA通信对机器人打磨进行联合虚拟调试研究,通过对调试前后的数据进行对比分析,有效验证和优化了机器人打磨轨迹,同时可缩短生产现场的调试周期,降低设计阶段电气硬件的调试风险和成本投入。本研究以某转向臂为例,在MCD 中创建三维模型,并根据实际需求来设置运动对象属性,并用S7-PLCSIM Advanced(OPC UA)来创建虚拟控制器,建立TIA 与MCD 的信号映射,交换数据,从而完成虚拟仿真调试。
1 TIA中PLC的组态及通信参数设置
为了与S7-PLCSIM Advanced 软件中创建的虚拟CPU 建立通信,在对TIA 组态时添加西门子1500中的V2.0 固态版以上的CPU。打开TIA16.0 编程软件,新建一个项目,添加新设备时选择CPU1511-1PN 下订货号为6ES7511-1CK00-0AB0 的V2.8 版控制器。选择项目属性中保护选项下将块编译,支持仿真功能打开。同时,在PLC1(CPU1511-1PN)常规属性中,PROFINET 接口的以太网选项中设置IP 地址为192.168.2.2(这里的IP 地址要与PLCSIM Advanced 中虚拟控制器CPU 的IP 地址相同),在OPC UA 服务器选项中激活OPC UA 服务器,复制服务器地址(opc.tcp:∕∕192.168.2.2:4840),启用SIMATIC 服务器的标准接口。在运行系统许可证的OPC UA 选项中选用SIMATIC OPC UA S7-1500medium 许可证,在防护与安全的连接机制下勾选“允许来自远程对象的PUT∕GET 通信访问”。PLC组态及通信参数如图1所示。
2 S7-PLCSIM Advanced创建虚拟控制器
S7-PLCSIM Advanced 软件支持SOFTBUS 和OPC UA 方式的虚拟调试,其中,OPC UA 通信方式在MCD 平台中能实现虚实联调。博途TIA 和MCD利用S7-PLCSIM Advanced 的OPC UA 通信来实现对转向臂的虚拟调试。首先,打开PLCSIM Advanced V3.0,在线访问(Online Access)选择PLCSIM Virtual Eth.Adapter。其次,在通信地址TCP∕IP communication with 中选择Local(本地IP 地址设置为192.168.2.1)。再次,新建虚拟控制器,设置Instance name 为My_PLC3,IP address(地址)为192.168.2.2,Subnet mask(子网掩码)为255.255.255.0。最后,单击Start 按钮启动,激活虚拟控制器。正常启动如图2所示。

图2 S7-PLCSIM Advanced创建虚拟控制器
3 转向臂三维模型的运动属性设置及信号创建
3.1 转向臂三维模型的运动机电对象
转向臂由五部分运动机构组成,包括由交流电机驱动旋转的一轴基座、由气缸驱动的线性运动二轴、由伺服电机驱动旋转的三轴、由步进电机驱动旋转的四轴、由气缸驱动的线性运动五轴气爪(气爪张合)。
通过对各轴的运动特性进行分析,需要在MCD 中设置转向臂各部件的机电对象,其中,机电对象主要有刚体和碰撞体。根据案例特征,转向臂中的运动部件都应设置为刚体,需要监测碰撞特性的部件设置为碰撞体。碰撞体与刚体一起添加到几何部件后才能触发碰撞。转向臂的一轴、三轴和四轴的运动为旋转运动,在MCD 中将这三部分的运动设置为铰链副。转向臂的二轴和五轴运动为线性运动,在MCD 中将这两部分设置为滑动副。其中,气爪1 和气爪2 在滑动副之前添加弹簧阻尼器来实现自动合爪。转向臂机械机构及各轴的机电对象设置运动副定义如图3所示。
3.2 设计各运动副的执行器
对各机电对象设置运动副后,只是建立运动关系,在添加相应的运动执行器后,才能使各运动副按照控制要求运动。常用的执行器有传输控制、速度控制和位置控制。转向臂一轴和四轴添加速度控制,转向臂二轴、三轴和五轴添加位置控制。转向臂二轴的位置控制设置如图4所示。

图4 二轴位置控制设置
3.3 在MCD中创建信号和设计仿真序列
在MCD 中创建信号,通过信号来控制转向臂五个轴的运动。对转向臂的五个运动轴各创建两个信号,均为布尔型输入信号。
仿真序列是MCD 平台来处理机构运动逻辑关系的快捷方式,可将转向臂中各个执行器与传感器、信号进行关联,从而实现逻辑控制。在创建转向臂一轴的仿真序列时,先将一轴速度控制中的速度设置为零,再通过仿真序列把一轴的正转信号和一轴以50 mm∕s 速度进行关联,把一轴反转信号和一轴以-50 mm∕s 速度进行关联。即当一轴正转信号为TRUE 时,一轴以50 mm∕s 速度正转;当正转信号为FALSE 时,一轴速度为0 mm∕s,停止运转。此外,可根据需求在仿真序列中修改速度。在对二轴位置控制创建仿真序列时,应先将位置控制中的目标位置和运动速度设置为零,在仿真序列中的信号与参数关联时设置对应的目标位置和运动速度。
4 TIA 通过PLCSIM Advanced 与MCD 实现虚拟联调仿真
4.1 在TIA中添加变量和设置HMI画面
博途(TIA)软件是业内首个采用统一工程组态和软件项目环境的自动化软件,几乎适用于所有自动化任务[3]。为验证运动控制设计的合理性,需要在TIA中创建控制程序和人机画面,再与MCD建立通信。程序变量和人机画面的创建步骤如下:首先,在TIA 下PLC 变量的默认变量表中添加十个控制变量,用于控制转向臂五个轴的正、反运动,变量地址为M0.0~M1.1,变量类型均为布尔型,创建的PLC 变量如图5 所示;其次,对整个控制器进行编译,编译完成后点击下载图标;最后,在下载界面中,选择设置PG∕PC 接口的虚拟网卡(PLCSIM Virtual Eth.Adapter),即可将变量参数和设备组态信息下载到虚拟PLC中[4]。

图5 创建PLC变量
在整个TIA 项目中添加HMI_TP700 Comfort,并在根画面上设置十个控制转向臂运动的按钮,将各按钮与PLC 布尔变量(M0.0-M1.1)建立连接,HMI按钮设置和变量连接如图6所示。

图6 HMI按钮设置和变量连接
4.2 在MCD中完成外部信号配置和信号映射
为了和外部信号建立连接,在MCD 平台中选择外部信号配置,选择OPC UA后添加服务器,在添加对话框中粘贴TIA 中OPC UA 服务器地址(opc.tcp:∕∕192.168.2.2:4840),并测试连接,连接成功后点击“确定”。在对应的PLC_33 下选择Memory 的一轴正转、反转等信号(地址为M0.0~M1.1),点击“确定”即可。外部信号配置如图7所示。

图7 外部信号配置
外部信号配置好后,在MCD 平台中选择信号映射,该信号映射用于建立TIA 中的PLC 信号变量与MCD 中的信号连接。打开信号映射对话框后,选择外部信号类型(OPC UA)和服务器地址(opc.tcp:∕∕192.168.2.2:4840)。若在TIA 和MCD 中创建信号的名字相同,就直接选择信号自动映射,然后确定即可。信号映射对话框如图8所示。
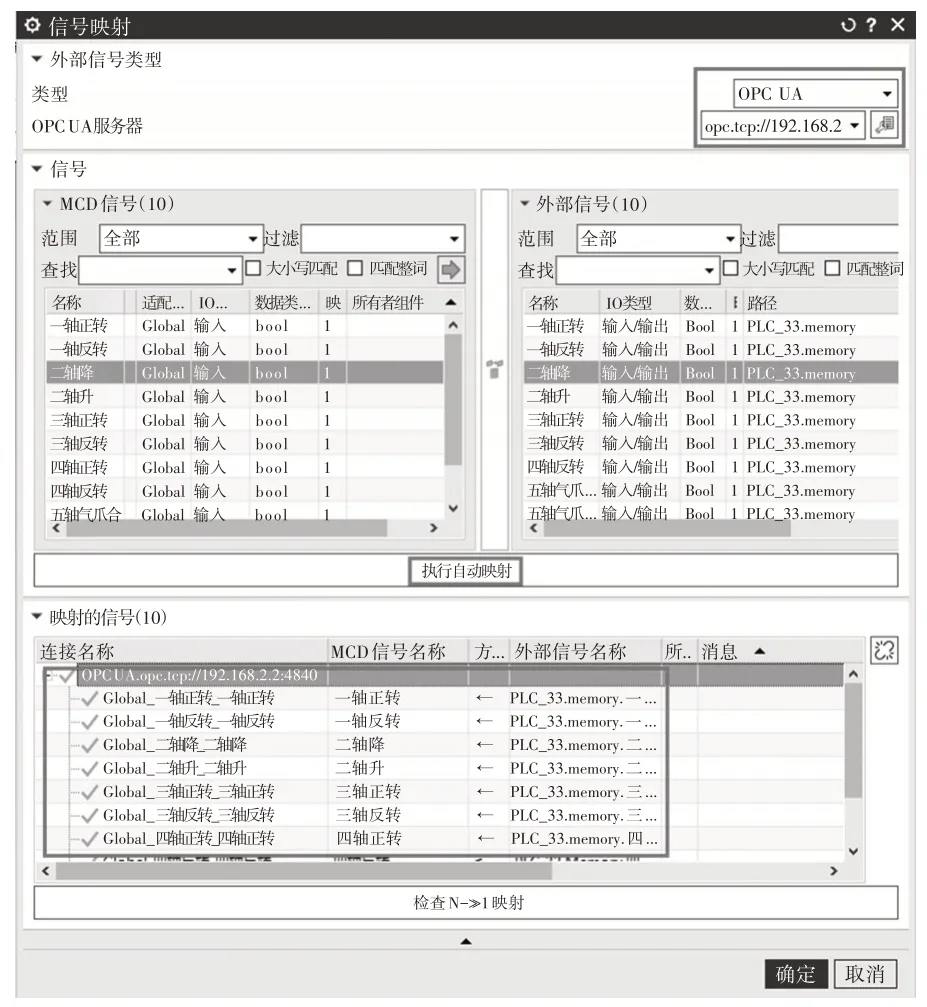
图8 信号映射对话框
4.3 仿真调试
在MCD 和TIA 信号映射成功后,通过HMI 中的按钮来控制MCD 中的转向臂模型的运动。在MCD 中,将各信号添加到查看器中,启动运行仿真,在TIA 中启动HMI 仿真画面,点击各按钮即可控制MCD 中转向臂各轴的运动,同时可在MCD 的运行查看器中查看各信号状态情况。仿真调试如图9所示。

图9 仿真调试
在图9 中,按下HMI 中的一轴正转按钮,MCD中的一轴正转信号为TRUE,转向臂一轴基座正转。松开HMI 中的一轴正转按钮,MCD 中的一轴正转信号FALSE,转向臂一轴基座停止正转。当按下HMI中的一轴反转按钮,MCD中的一轴反转信号为TRUE,转向臂一轴基座反转。松开HMI 中一轴反转按钮,MCD 中的一轴反转信号为FALSE,转向臂一轴基座停止反转转。其他轴的虚拟调试与一轴类似。
5 结语
本研究以转向臂为研究对象,通过PLCSIM Advanced 来建立虚拟控制器,TIA 采用OPC UA 通信方式与MCD 建立通信,验证了MCD 在该通信方式下调试的可行性,为虚拟仿真调试的通信方式提供借鉴。
