磁编码器研究现状及展望
2023-12-28陈洪生杨建飞
陈洪生,王 寅,邱 鑫,杨建飞
(南京师范大学 电气与自动化工程学院,南京 210023)
0 引 言
编码器作为高精度位置传感器,与数字控制相结合,将控制系统中的位置角度和速度等物理信号转变为电压信号,以此进行位置检测和运动控制[1]。高分辨率、高精度、低成本和强抗干扰能力是编码器的主要研究方向[2]。
磁编码器利用磁敏感元件检测磁极运动产生的变化磁场,并解算得到运动物体的位置[3],具有精度高、成本低、抗振动和冲击能力强和体积小等优点[4-5],在军事、医疗、航空等领域逐步取代光电编码器和旋转变压器[6-7]。
本文对磁编码器进行系统介绍。首先,介绍了磁编码器的基本原理和分类,根据磁敏感元件的不同分为霍尔式和磁阻式;其次,列举了磁编码器的单极和多极位置解算方法。其中多极的游标卡尺法解算精度最高;再次,分析了磁编码器位置解算的3个主要误差因素及其补偿算法,锁相环及其改进算法成为主流;然后,对国内外的各类磁编码器产品进行调研,并对比其性能;其中,北京金钢科技有限公司和日本多摩川所生产的磁编码器精度达到24位;最后,展望了磁编码器未来发展趋势。总体而言,未来方向是提高磁编码器的分辨率和检测精度,减小体积,发展简单、高效的位置解算和误差处理算法。
1 磁编码器工作原理及分类
磁编码器主要由永磁体、磁敏元件以及信号处理电路组成[8-9]。与光电编码器相比,磁编码器利用永磁体代替玻璃码盘,永磁体与检测对象同轴相连,永磁体在运动过程中产生周期性变化的磁场,磁敏元件检测到磁场后输出相应周期性变化的电压信号,磁编码器建立电压信号与位置角度的单一映射关系,以此达到检测对象的位置和运动速度。典型的磁编码器结构如图1所示。
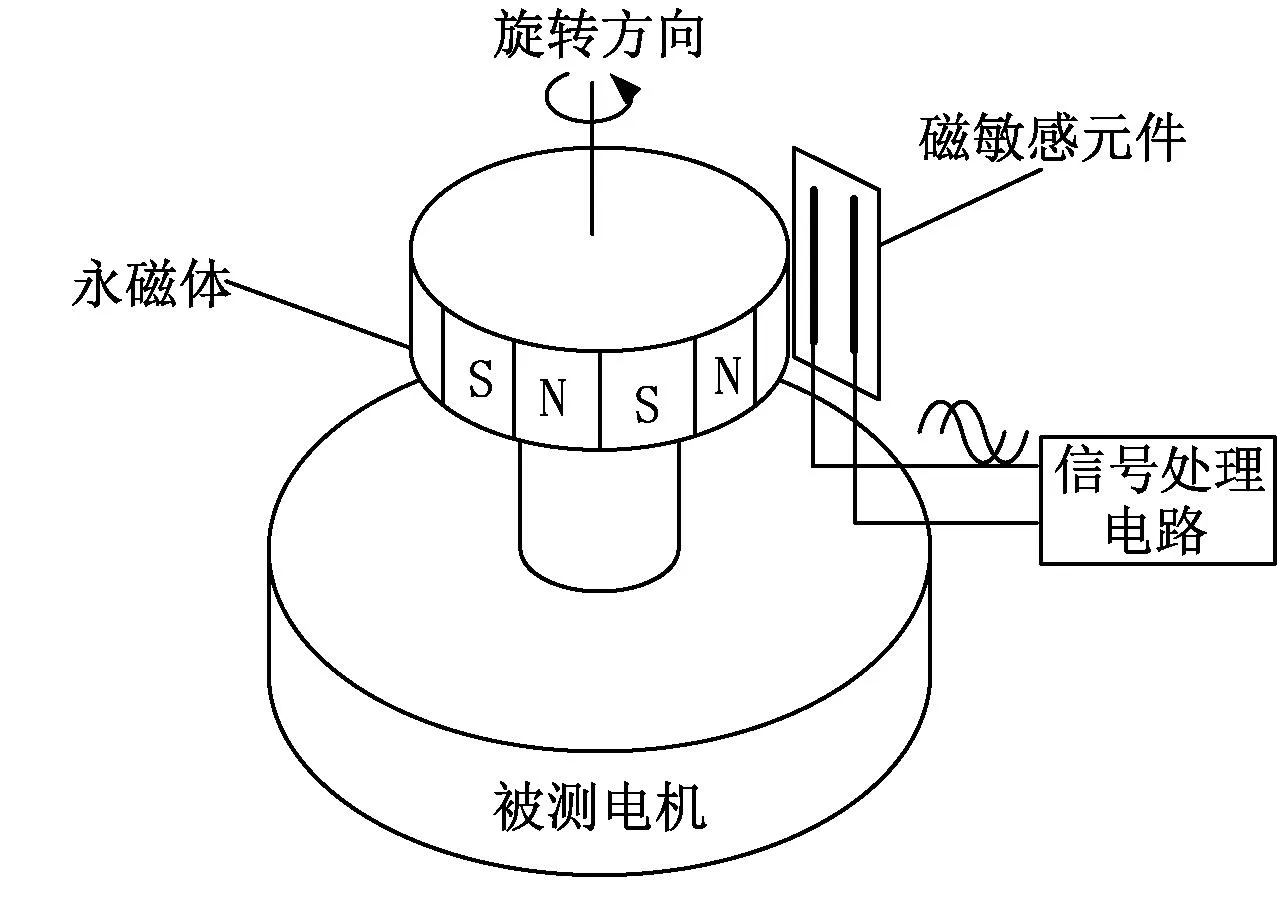
图1 磁编码器结构
磁敏元件分为磁阻元件和霍尔元件[10]。根据磁敏元件的不同,磁编码器可以分为磁阻式编码器和霍尔式编码器。磁阻式根据磁敏电阻的不同可以分为巨磁阻(GMR)、各向异性磁阻(AMR)和隧穿磁阻(TMR);霍尔式编码器根据永磁体磁极数量又可以分为单极霍尔式磁编码器和多极霍尔式磁编码器[11-12]。磁敏元件分类如图2所示。

图2 磁编码器分类
1.1 磁阻式编码器
1.1.1 巨磁阻(GMR)磁编码器
巨磁阻[13](GMR)磁编码器的磁敏元件为巨磁阻,主要由自由层、导体垫片、固定层、反铁磁体以及两端的连接金属组成,其结构如图3所示。

图3 巨磁阻(GMR)结构
自由层的磁化方向会受外界磁场的影响而变化,反铁磁体的磁化方向是固定的。当两者方向平行时,呈现高电阻状态;垂直时,呈现低电阻状态。
巨磁阻(GMR)的电阻率比各向异性磁阻大一个数量级,因此具有良好的温度稳定性,同时其结构复杂,制作成本高,存在层间耦合,在许多场合受到制约。Infineon公司生产的TLE系列就是基于GMR制作的位置传感器。
1.1.2 各向异性磁阻(AMR)磁编码器
各向异性磁阻(AMR)磁编码的磁敏元件为各向异性磁阻[14]。其由铁磁条层和两端的连接金属组成,结构如图4所示。

图4 各向异性磁阻(AMR)结构
各向异性磁阻的电阻值由电流方向与铁磁条层的充磁方向决定,平行时的导电电阻最大,垂直时的导电电阻最小。各向异性磁阻的电阻率表示:
ρ(θ)=ρ⊥+(ρ‖-ρ⊥)cos2θ
(1)
式中:θ表示电流方向与铁磁条层磁化方向的夹角;ρ⊥表示垂直方向时的电阻率;ρ‖表示平行方向时的电阻率。
各向异性磁阻在较低磁场下仍有百分之几的数值,基于AMR制成的传感器多用于仓储、医疗等领域。MagnTek公司生产的MT6825是基于AMR制作的18位角度传感器。
1.1.3 隧穿磁阻(TMR)磁编码器
隧穿磁阻[15-17](TMR)结构与GMR类似,TMR在自由层与反铁磁体间添加了一层隧穿屏障,自由层和反铁磁体的相对取向决定了隧穿屏障的电阻和电流,其结构如图5所示。

图5 隧穿磁阻(TMR)结构
TMR的信噪比好、精度高、功耗低等优点,是目前最常用的磁敏电阻。多维科技生产的TMR3105A是基于TMR制作的角度传感器。
磁敏电阻具有灵敏度高,响应速度快,温度特性好等优点,因此磁阻式编码器广泛应用于航空航天领域[18]。但是磁阻式编码器精度的提高必然伴随着磁极数量的增加,使得加工难度增大、体积增大、成本上升。目前主要应用于仪器仪表、医疗器械等领域。
1.2 霍尔式磁编码器
1.2.1 单极霍尔式磁编码器
单极霍尔式磁编码器[19-20]的单对极永磁体旋转一周,霍尔传感器产生一个周期的正余弦信号,充磁方向一般为径向。通过多个霍尔传感器分布式设计,可以获得不同的模拟信号。图6为采用的单磁极6霍尔感应模型。6个霍尔传感器对称分布,将6路霍尔信号差分处理,可以消除信号中2次和3次谐波,通过此方法可以将17位分辨率的磁编码器精度提高到13位。

图6 单极6霍尔磁编码器结构
1.2.2 多极霍尔式磁编码器
单极霍尔式磁编码器[21-22]旋转一周只能产生一个周期的正弦信号,编码器分辨率和精度有限。通过增加永磁体极对数,一个旋转周期内产生多个周期的正弦信号,提高磁编码器分辨率。多极霍尔式磁编码器计算绝对位置角度必须按照磁极划分区间,目前主要采用单对磁极和多对磁极组合式磁栅,如图7所示。

图7 单极多极磁体组合结构
内部单对磁极计算区间位置,外部多对磁极计算区间绝对角度。通过此方法可以将磁编码器17位分辨率下的精度由11位提高到15位。
1.3 不同磁编码器优缺点对比分析
综上所述,将磁编码器的磁敏感元件参数总结对比,如表1所示。

表1 磁编码器磁敏感元件参数对比
由表1可见,TMR磁编码器与其他3种磁编码器相比,参数具有明显的优势,功耗小、灵敏度高、响应速度快和温度漂移小等。
2 磁编码器位置解算方法
对磁敏感元件输出的电信号进行位置解算,是磁编码器的关键技术问题[5,8,23]。根据永磁体磁极数量的不同,磁编码器的位置解算方法分为单极解算方法和多极解算方法。下面对单极型和多极型磁编码器的解算方法进行分析,对比其优缺点。
2.1 单极磁编码器位置解算方法
单极型磁编码器在定子圆周相差90°位置上放置磁敏感元件,理想情况下,磁敏感元件输出两个正交的正、余弦信号,如图8所示。

图8 理想单极磁编码器信号
目前单极型磁编码器的位置解算方法主要有反正切法、查表标定法、锁相环法。
2.1.1 反正切法
单极型磁编码器的理想输出信号的数学模型如下表示:
式中:Um为输出电压峰值;θ为被测对象的位置角度;uA,uB为磁敏感元件输出的正、余弦信号。
理想的两路输出信号为正弦、余弦函数,利用反正切函数即可求得角度值,如下表示:
反正切法[24]原理简单,易于实现,但对硬件要求高。同时,反正切函数在90°和270°时值无穷大,会导致数据溢出,解算精度取决于磁敏元件输出信号的理想程度,受非线性影响大。正切函数曲线如图9所示。

图9 正切函数
2.1.2 查表标定法
查表标定法[25]的本质是对圆周角度进行绝对编码细分,建立磁编码器输出信号与细分后的位置角度数字量信息的单一映射关系。采用高精度的光电编码器与磁编码器同轴相连,对磁编码器输出的电压信号与角度数据进行标定,将角度数据存入EEPROM(可擦除、可编码存储空间)中。工作时仅对输出电压信号判断,分区间查表,即可输出位置角度。标定查表区间如图10所示。

图10 标定查表区间
查表标定法只需判断信号区间,解算速度快。但占用大量存储单元,分辨率越高,占用内存越大。
2.1.3 锁相环法
锁相环法是闭环位置解算[26-27]。锁相环由相位检测器、环路滤波器和压控振荡器组成。相位检测器是基于三角公式原理,锁相环环路的输入和反馈信号近似输入输出之间的误差;环路滤波器通常采用比例积分控制器,对整个系统起超调、响应和噪声抑制的作用;压控振荡器跟踪输入输出相位差,调整输出相位。锁相环法原理图如图11所示。
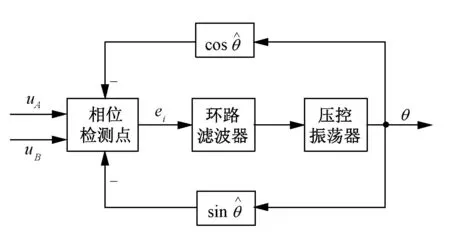
图11 锁相环结构
将磁编码器输入的sin、cos信号与输出反馈的两路信号通过乘法器、减法器进行相位比较,得到误差ei,表示:
当锁相环锁定后,误差ei足够小时,可以近似如下式:
误差经过环路滤波器和压控振荡器后输出角度值 。
锁相环法是闭环位置解算,受误差影响小,解算精度高,具有一定的滤波能力。但是算法复杂,解算时间长。
2.2 多极磁编码器位置解算方法
增加永磁体极对数可以提高磁编码器分辨率,与单极磁编码器相比,多极磁编码器输出极对数个周期的正余弦信号,计算公式表示:
usin=Umsinθe
ucos=Umcosθe
θe=pθm
式中:θe是电角度;θm是机械角度;n是经过的完整周期数;p是极对数。采用单极解算方法无法指定n,造成绝对角度丢失。多极磁编码器位置解算方法的重点是完整周期数n的计算。
2.2.1 游标卡尺法
游标卡尺法是基于游标测量原理[28],永磁体由两个多极磁环组成,称为内码道和外码道,磁敏元件扫描永磁体输出两组周期数差1的正弦信号,如图12所示,这里称为A信号和B信号。

图12 游标磁体输出信号
在初始位置相同的情况下,两组信号的位置角度可以表示:
式中:θA、θB表示A信号和B信号对应的实际角度;mA、mB表示A信号和B信号的完整周期数;N表示旋转一周的总周期数;φA、φB表示当前周期内的绝对位置角度。
内外码道初始位置相同,即θA=θB,可表示:
内码道和外码道极对数相差1,信号A和信号B的完整周期数mA、mB的关系只存在以下两种情况:
(1)m=mA=mB时
(2)m=mA=mB+1时
在0~360°内根据φA-φB判断角度所处的区间,根据φA或者φB即可计算当前位置角度。游标卡尺法原理简单、占用内存小、易于硬件实现,但对永磁体充磁质量要求较高。
2.2.2 偏心结构法
在不增加磁体的情况下,通过移动多极磁体的中心和轴的旋转轴线,多极磁体与检测对象的旋转偏心同步,以此计算完整周期数n。多极偏心结构如图13所示。
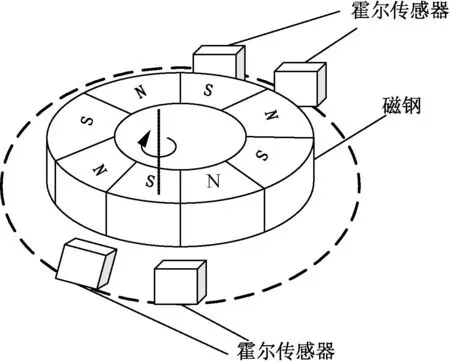
图13 偏心结构
偏心结构[29]使得霍尔传感器与多极磁体之间的距离呈周期性变化,传感器输出幅值呈周期性变化的正余弦信号。
霍尔传感器输出信号与θm之间的关系存储在查找表中,完整周期数是通过计算查找表中的理想信号与实际输出信号之间的误差来获得,并且当下式最小时确定。可表示:
在不增加磁栅数量的情况下,采用偏心结构可以有效计算位置角度,但是需要多个角度传感器,成本较高。
2.3 位置解算方法优缺点对比
综上所述,磁编码器的位置解算方法对比分析如表2所示。

表2 位置解算方法优缺点对比
3 精度提升算法
受到磁极充磁不均、模拟电路电阻误差、传感器安装位置误差等因素的影响[30-31],在正交的正余弦信号中存在幅值差异、相位偏移、信号失真以及环境噪声[8,32]等非线性因素,从而影响磁编码器位置检测精度。对磁编码器的非线性因素的处理,对提高磁编码器精度至关重要,是磁编码器的重点研究内容。
3.1 信号失真补偿算法
实际工程应用中,磁编码器输出信号会受到实际环境的干扰,如外围模拟电路、地磁等,使得原本理想的正余弦信号发生畸变,信号中产生大量的高次谐波。对此,引入补偿算法消除谐波干扰。
文献[33]采用基于观测器锁相环(OPLL)和非线性补偿方案来消除谐波失真引起的位置误差。首先,OPLL用于消除非理性因子并估计相位误差。然后,建立两个由于谐波而偏离的位置信号误差表,每次采用结构通过查表补偿的方法对OPLL的主相位角进行调制。该方法有效消除非理想因子、谐波失真,提高磁编码器精度。
文献[34]提出一种基于谐波抑制(HR)的双锁相环法(DPLL)。将HR与DPLL的第一层PLL的相位检测器集成,借助谐波抑制(HR)来研究相位检测器的非理想性,并通过梯度下降法来抑制谐波分量。DPLL通过在相位跳跃、恒定频率和斜坡频率期间保持零稳态误差,抑制谐波失真的同时保证了系统的鲁棒性。但是该方法无法处理初始信号的相位偏移,并且存在一定的信号延时。
文献[35]提出了最速下降的迭代线性搜索算法分析磁编码器的位置误差。首先,对磁编码器信号中的谐波失真进行建模。然后,构建信号的误差函数。最后,利用最速下降的无约束和多元算法最小化误差函数。但是对谐波失真建模的高阶近似会导致补偿参数的收敛出现偏差,补偿效率取决于误差模型的准确性。
文献[36]提出了一种单极6霍尔式磁编码器,在单极磁钢周围等间距分别6个线性霍尔传感器,6路信号差分处理,可以消除偶数磁谐波。6霍尔传感器等间距分布,6路信号正交,可以消除3次和3的倍数次谐波。该方案通过增加硬件,消除谐波失真,提高磁编码器精度。
3.2 幅值和相位偏移补偿算法
由于磁编码器安装的人为误差,输出信号产生幅值偏差和相位偏移。磁敏元件与磁体之间的距离误差,检测的磁场强度不同导致幅值偏差;磁敏元件之间未严格正交、多磁体的磁极初始位置不同步,导致输出信号相位偏移。
文献[37]采用基于优化理论的递归梯度搜索算法来校正磁编码器输出的非理性信号,将位置信号近似为误差随时间变化的函数,将误差结果迭代至最小时输出位置信号。同时,在算法中添加了相位偏移校正,并且只应用了二阶近似方程,提高精度的同时降低了计算量。
文献[38]提出一种自动标定和自适应锁相环相结合的方法,通过模糊逻辑控制,灵活地改变锁相环的带宽,自适应带宽锁相环检测相位检测器的输入误差,根据误差结果调整滤波参数,从而自动校正磁编码器输出信号中的直流偏移、幅值偏差和相位偏移,提高磁编码器精度。
文献[39]提出了一种自校正调整算法。该方法是基于低通滤波器,通过调整滤波器截止频率,从而确定校准参数,随后通过调整算法将输入信号归一化,在锁相环上实现,通过闭环使参数逐渐收敛,降低误差影响,提高磁编码器精度。
3.3 随机噪声补偿算法
磁编码器的实际输出信号不可避免地带有一定量的随机噪声,包括高斯噪声、白噪声等。随机噪声可能引起信号跳变,使编码器信号在过零点位置产生检测误差,降低磁编码器检测精度。
文献[39]提出了自适应带宽锁相环(AWB-PLL),利用AWB-PLL对磁编码器的相位角进行平滑估计,同时在相位检测器后增加低通滤波器,根据相位检测器的相位差,采用自适应带宽算法适当调整滤波参数,以此消除噪声干扰。
文献[40]针对随机噪声引起的极点跳跃问题,提出了双动态窗口角度区间预测法,对多极磁编码器输出的角度值进行预测,在预测值处设置窗口上限和下限,由窗口值判断极点数,消除了极点数的误判。
文献[41]提出增强比率线性补偿法,将每个周期相位误差存储在查找表中,不断更新位置误差补偿值,同时在增强比率线性化中添加低通滤波器和校准器,消除随机噪声,提高性能。
文献[42]提出了自适应神经网络和锁相环相结合的方法,利用自适应神经网络估计输出信号中的非理性因子,然后利用锁相环的闭环特性跟踪信号。神经网络中的自适应学习可以加快收敛速度,减少随机噪声干扰。
结合诸多研究可以发现,滤波和误差迭代算法是目前磁编码器位置解算和误差处理的主要方法。其中改进锁相环算法主要是在锁相环算法的基础上引入滤波或者误差迭代算法,保证系统鲁棒性的同时进一步提高解算精度。但是目前没有哪种误差处理算法能够对所有误差进行消除,总有误差无法完全处理,这也导致磁编码器精度无法进一步提高。
4 国内外磁编码器产品分析对比
目前,市面上的磁编码器产品主要来自德国、英国、瑞士、日本和中国等国家,高端产品以德国和日本为主。传统的磁编码器精度低、成本高。近年来,随着磁敏元件和磁栅制造技术的发展,高分辨率的磁编码器不断被开发,但其分辨率与光电编码器相比仍有一定差距。
4.1 国内磁编码器厂家及产品分析
国内主要有北京金钢科技有限公司、嘉兴市锐鹰传感技术有限公司、威海艾迪科电子科技股份有限公司和深圳四方电气技术有限公司等对磁编码器进行研发和制造。
威海艾迪科电子科技股份有限公司生产的磁编码器产品主要是基于集成磁传感器芯片的分体式绝对值编码器,分辨率达到17位,主要应用于伺服系统。
北京金钢科技有限公司生产的磁编码器包括MBS和MBP两种型号,内部拥有多个高精度霍尔传感器检测磁场变化,采用特有磁干扰屏蔽技术,可以安装于强电磁干扰环境,7 mm超薄中空结构,方便各种场合安装。MBS系列的分辨率为16~17位;MBP系列的分辨率高达24位,精度小于0.01°。目前,北京金钢科技有限公司生产的中空磁环编码器凭借其体积小、精度高,广泛应用于军工以及机器人领域。
4.2 国外磁编码器厂家及产品分析
瑞士Baumer公司生产的EAM绝对式磁编码器单圈分辨率14位,多圈18位,采用坚固的ShaftLock轴锁设计法兰,防止轴向穿透,即使安装不当时,也基本不影响编码器可靠性。
奥地利AMS公司生产的AK7452磁编码器芯片,虽然基于HALL元件,但是分辨率达到14位,主要应用于医疗、摄影等领域。
德国Hengstler生产的AR系列重载型磁编码器,分辨率为12位,防护等级达到IP69K,轴向和径向可同时承受300 N的力,广泛应用于龙门起重机、压力机、海上设备等重型机械设备。
日本Tamagawa公司是目前亚洲地区高精度磁编码器的主要制造商,其生产的TS569 MSB系列绝对式磁编码器分辨率最大24位,通过检测Z相位执行伪绝对输出。
各国磁编码器分辨率对比如表3所示。

表3 各国磁编码器产品分辨率对比
目前,国内的大部分磁编码器产品主要是基于集成传感器芯片,分辨率和精度取决于所选芯片的性能,磁编码器发展受制于芯片制造。国内的金钢科技和国外的诸多公司开始发展多极磁环,通过提高磁极数和多极解码算法提高磁编码器分辨率。
5 结 语
虽然多极中空磁环、分体式单极等不同类型的磁编码器已生产,能满足一定的市场需求,磁编码器的应用仍以建筑机械、电梯等场景,但是对于伺服、机器人等对高精度和体积要求高的场景,仍以光电编码器为主。位置解算算法、磁栅制作水平和误差处理技术是提高磁编码器精度的关键。在采样频率一定时,需要提高磁极数,在锁相环基础上发展更加高效的位置解算算法,提高磁编码器的抗干扰性,减少误差干扰,从而提高磁编码器精度。
综上所述,磁编码器未来发展方向有如下三方面。
1)高分辨率、高精度。高分辨率是高精度的基础,也是磁编码器的关键指标。目前磁编码器的分辨率在12~20位,检测精度在14位左右。随着对控制要求的不断提高,高精度成为传感器产品的必然发展趋势,磁编码器需要不断提高自身分辨率和测量精度,适应行业发展,在高精度控制领域逐步取代光电编码器,满足未来更广阔的应用市场。
2)集成化、小型化。磁编码器的体积是制约磁编码器应用的重要因素,体积越小,应用范围越广。磁编码器分辨率和精度的提高必然伴随着磁极数量的增多、处理电路的复杂化,导致体积增大。目前,外围模拟电路、磁敏元件已经逐渐被集成到微型处理芯片中,未来的磁编码器将作为整体对系统位置信号完成检测、处理和反馈。
3)低成本化。现阶段磁编码器分辨率和精度的提高是以牺牲成本为代价,不利于磁编码器的推广应用。提高磁极数量和采用高性能的处理芯片可以有效提高分辨率,但成本增加。相同精度的磁编码器成本是光电编码器的2~3倍,严重制约磁编码器发展。
