BIM 技术在大熊猫城市栖息环境营造中的应用
2023-12-28邓力铭罗利王佳林冯明友
邓力铭 罗利 王佳林 冯明友
(1.中国五冶集团有限公司,成都 610000;2.西南石油大学 地球科学与技术学院,成都 610000)
引言
在城市公园体系中,动物园或主题公园作为特殊公园,发挥着保护物种、维护生物多样性的作用。因此,在动物园规划设计时,需因地制宜合理规划,建设科学良好的展览体系和栖息环境,确保动物园能够发挥科学教学和科研功能,营造生态和谐。
动物园建造经历了从“牢笼式”到“自然展示”的发展过渡,从强调人的视觉感受发展到为动物提供丰荣福利,满足动物身心健康需求,在动物保护理念方面取得较大的进步[1]。同时,城市熊猫繁育基地的建设对于大熊猫的培育具有基础性的作用,将圈养大熊猫野化放归,是改善野生大熊猫遗传多样性、壮大野外大熊猫种群的一个重要途径。目前研究以大熊猫生活习性和繁育为主,侧重于动物野外保护区及栖息地生态修复技术[2],对于在城市中构建自然化的栖息环境的研究相对较少。
基于此,本文以成都大熊猫基地改扩建项目为研究背景,在项目建设过程中,以BIM 技术为基础对数字化场地、AI 衍生式设计和虚拟仿真模拟等技术升级,为大熊猫的野化放归做准备。
1 数字化场地应用
成都大熊猫基地改扩建项目占地114.56 公顷,地形多变、高差大,类似大熊猫原生生境地形。地形构建中,需尊重并最小化干预场地地形地貌,同时需打造出水系形态自然的溪流,以自然跌落的形式汇入场内人工湖区。针对本工程地形格局多变、地形微调面积广,多区域分步实施的施工难点。采用无人机测量+GIS 技术,快速完成测量作业,为土石方调配方案做好数据支撑。利用获取的场地模型整合地形与道路模型,分析场地特性,合理规划运输路线,减少对地形格局的影响,动态调整施工便道,保障设备车辆合理调度。
1.1 无人机地形测量
无人机在边坡、场平等多种复杂土石方平衡情况下具备较高的计算准确性及工作效率[3]。为提高地形测量效率,本项目采用飞马无人机D2000+五镜头D-OP3000 倾斜模块,设置航高150m、重叠率85%等飞行参数,自动生成航线任务,实现了场地快速成像数据采集。应用Context Capture Center 生成的倾斜摄影模型,导出模型文件,借助Acute3D Viewer 读取模型信息,对指定区域土石方填挖测量。
利用无人机获取的原始地形测量数据和设计地形比对,调整优化土石方调配方案;定期使用无人机测量施工区域,获取高程数据,使用两次相邻测量数据,动态分析区块挖填方量,实时调整土石方开挖方案,实现土石方填挖动态平衡,减少土石方二次开挖量[4]。据统计,该区域人工测量需要40 工日/人,无人机测量需3.5 工日/人,该项目地形微调阶段测量时间较人工测量耗时缩短95%,极大地提高了测量效率,该项目挖填平衡图,如图1 所示。
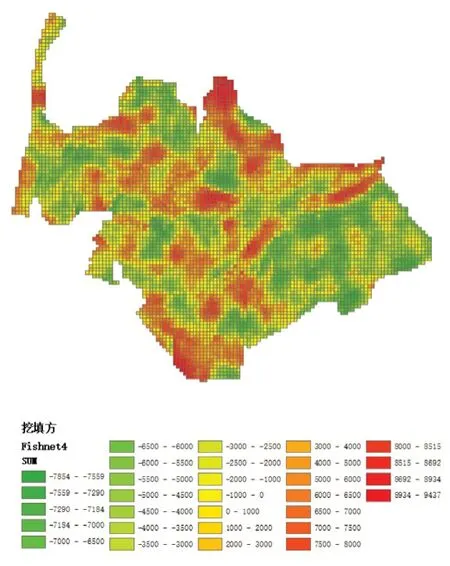
图1 项目挖填分析图
1.2 运输道路规划
将倾斜摄影数据完成空三计算之后,导出格式为.las 的点云模型,通过Recap 软件进行数据模型格式转换,使.las 格式转化为.rcp 格式,利用Revit 加载.rcp文件生成数字底板,整合园区永久道路、构筑物BIM模型。通过三维可视化的方法分析其位置关系,以园区设计道路为基础,根据施工作业量及机械调配需求,初步规划施工便道路线。对拟建施工便道分区分段进行分析,通过其总表面积与地形模型高差,计算土石方开挖量调整施工便道布置方案,如图2 所示。既满足施工需求,又最大化利用后期永久道路,做到“永临结合”实现绿色施工,减少对原始地形格局的影响。
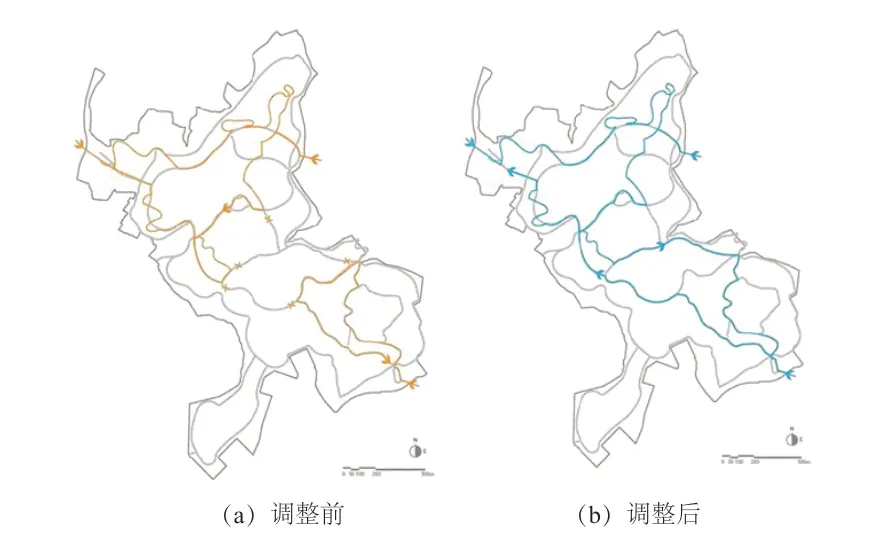
图2 便道调整方案图
1.3 径流分析
设计要求打造出形态自然,落差大的人工水系。为实现此目标,使用无人机采集的地形高程数据,利用civil 3D 软件进行坡度分析,模拟地表径流,如图3所示。在地形模型上分阶段创建旱溪水系,依据项目所在地历史降雨数据,复核雨季流量[5],确保水系能够满足场地未来补水、防洪的需求。
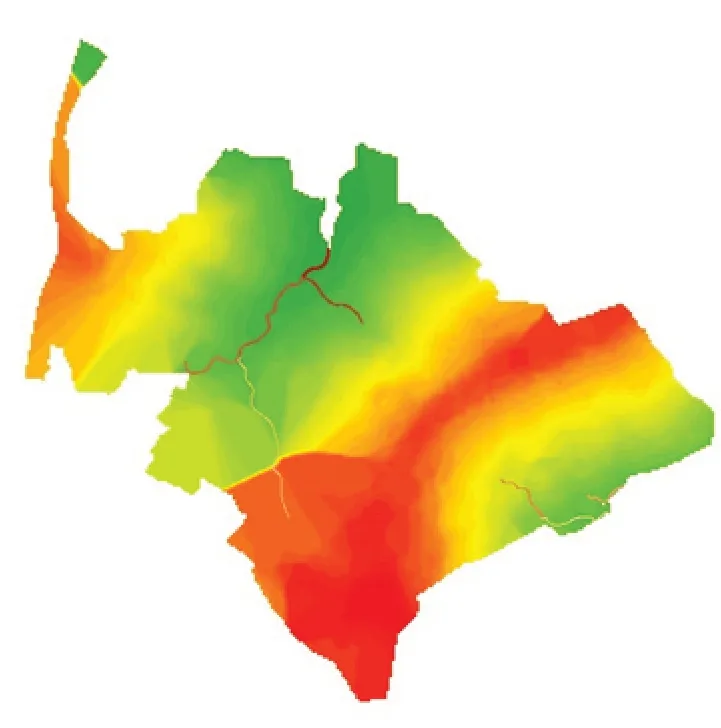
图3 流量分析
项目工期紧张,需不间断进行施工,项目土方作业时间主要集中在雨季,为减少雨季对项目的影响。根据施工阶段的需求,对水系施工动态调整,提出先行实施旱溪、湖区的作业顺序,保障雨季施工排水通畅。
为实现有效管控,对施工区域内易形成汇水通道的部位,在大土石方作业阶段,先施工旱溪、湖区,依据计算排水流量进行动态调整,作为施工场区内的主要排水通道与蓄水区。土石方微调阶段,先实施旱溪过滤层,减少土石方微调时水土流失对地形的影响,在土石方作业完毕之后栽植树木。通过分批提前实施水系部分工序的方法,减少施工区域排水通道对地形格局的影响,并保障了项目景观成形效果不受施工过程调整的影响。
2 AI 衍生环境植物群落布置技术
植物是大熊猫栖息地植被因素中重要组成部分,作为植物群落的底层,生长范围零散不具备规则形状。在设计时只能明确种植区域范围,难以对覆盖度进行精准设计[6]。目前,AI 技术在居住建筑设计、产品设计等方面广泛应用,为工程师提供多样性和创新性的设计方案,已显著地提高设计效率[7-9]。当前植物群落布置设计工作效率低、方案创意性不足,因此采用AI技术研究和探索全新的地被植物深化设计方法,全面提升设计的效率和效果势在必行。
2.1 AI 衍生式设计概念
AI 衍生式设计是人与计算机之间的协作设计过程,设计师定义设计参数,计算机运行出各种可能的设计方案。工程师通过制定可量化的评价目标,评价运行的各种设计方案能否达成既定目标的情况,如图4 所示。计算机在迭代生成设计方案的过程中不断学习工程师选择的方案生产经验,吸收方案结果的反馈,不断提高接下来生成方案的质量。
图4 AI 衍生式设计基本流程
2.2 AI 衍生式智能布置目标
本项目结合开发AI 衍生式智能布置算法构型,实现在不规则景观布置区域范围内,筛选优化方案,在满足覆盖度及景观施工种植规定间距范围内,迭代模拟植株最小数量。
2.3 基于AI 衍生式智能植物布置算法构型方案
2.3.1 选取研究区域
选取项目商业街西南侧景观区域内不规则观赏竹种植区域进行AI 衍生式区域模型创建,拟合边界选定算法聚焦范围,如图5 所示。
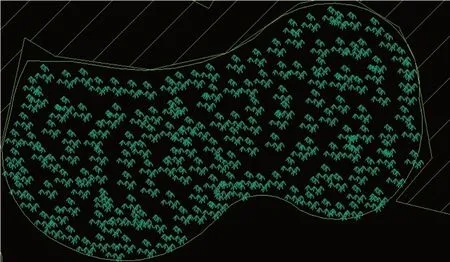
图5 种植区域选定
2.3.2 选定研究植物对象
竹林以32%的主要植被占比在熊猫栖息地中扮演重要的角色,因此选用刚竹作为AI 衍生式智能布置技术的研究对象。在园林绿化工程中,一般刚竹每平米种植4~5 株,种植间距为50~60cm,种植穴的规格为长、宽各40cm、深30cm,按间隔种植母竹,待母竹生长后形成竹林景观。
2.3.3 基于Dynamo 衍生式算法创建
调用可视化编程程序Dynamo,分别设置限定条件,如图6 所示。条件一:两棵刚竹母竹种植间距为最大值0.6m;条件二:起始布置点X 方向移动间距;条件三:起始布置点Y 方向移动间距;条件四:布置方向角。

图6 Dynamo 衍生式算法创建
分析选定区域刚竹种植面积大小,设置一个50m×50m 虚拟场地使其覆盖种植区域。沿场地两边各按0.6m 间距划分若干正方形,并且可绕中心旋转输入端“旋转角度”参数下设置的角度值,可见虚拟场地与种植区域交线角度随之改变。
运用Python 语言结合开发运算逻辑,求取出种植区域边界线与虚拟场地相交的小正方形块(含内部),过滤掉边界以外的小正方形块,随种植起算点角度、X方向偏移量、Y 方向偏移量变化,种植场地内划分正方形网格随之变化,形成动态模拟过程。
通过边界取整,判断种植区域边界与划分各正方形交线相交情况,将距离小于植株间距0.6m 的线段舍去,大于0.6m 的位置自动添加点位。求解出区域内各正方形的中心点与边界处各多边形的交点,将其作为植株的种植点。启用Dynamo调用构件按坐标放置功能,通过拟算点位精确布置简化的刚竹模型,模拟种植效果,如图7 所示。
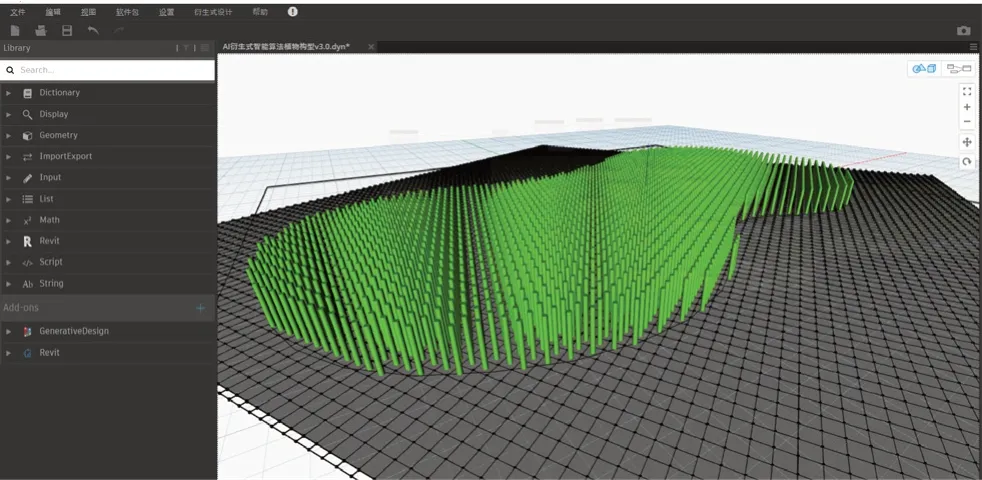
图7 刚竹模型精确布置
2.4 AI 衍生式智能植物布置算法构型分析
将植株种植数量设为输出项,在前端输入量变化过程中,输出值也将不断变化,最优化的种植布局应是在保证间距符合要求的情况下,在特定角度以特定种植起算点偏移量时,植株种植数量最少。衍生式设计的优势是探索尽可能多的布局方案,并找到同时满足条件的最优解。
启动Dynamo 中的Generative Design 功能,将该Dynamo 程序导入其中,首次运行使用Randomize 的衍生方法,设置随机生成方案的数量,假定生成200 个方案,软件会自动生成出200 个不同的方案,如图8所示。

图8 衍生式智能植物布置算法构型分析
从中找出“种植数量”,排名靠前的方案,分析其所对应的输入值所属的数值区间,利用所得数值区间,再一次进行衍生优化。
改为使用Optimize 的衍生方法,设置最大的“种植数量”为优化目标。根据Randomize 运行的结果,可知有小部分方案能达到超过2 300 棵植株的布局。将“种植数量”限制为大于等于2 300,进行第二次衍生。
通过优化衍生,在满足设计覆盖度要求之下,最终获得了2 个最优方案,综合来说最优种植数量为2 381 棵植株,同时满足0.6m 植株间距,此时旋转角为27°,选取最终方案后输出种植布置图,指导现场种植实施,程序自动保存该类植被最终选择的种植方案,记录相关参数,作为下一次运行结果的优先计算规则。
3 生境仿真分析
3.1 生境环境分析
通过调查研究表明,大熊猫喜欢在坡度较为平缓(小于20°)的缓坡活动,特别喜欢小于10°的平地,不喜欢在大于30°的陡坡觅食。因此在熊猫兽舍地形构造方面:休息区、游玩区地形设置坡度小于10%,觅食区设置坡度小于20%。在满足大熊猫的喜爱地形上,将游玩区设置于坡顶,保持大熊猫部分活动区域的标高不低于人群观赏主视线标高,以抬高大熊猫活动区域标高的方式使大熊猫能避免人群的俯瞰视角带来压迫与焦虑,保障大熊猫的视野开阔,同时通过不同的观赏通道,最大限度满足游客的观赏需求,如图9所示。

图9 数字底板剖面图
3.2 人类活动分析
人类活动中对生境内大熊猫造成影响,主要因素是游客产生的噪声。因此,拟利用生境的地形与植被种植搭配相结合,来阻挡和减弱外界游客噪声对生境内大熊猫的影响。为了解游客游玩时产生的噪声大小,结合实际的现状选取高峰期和普通期的时间段对熊猫基地老园区熊猫生境做专业的噪音对比测试,如表1和图10 所示。

表1 熊猫基地噪音对比测试数据
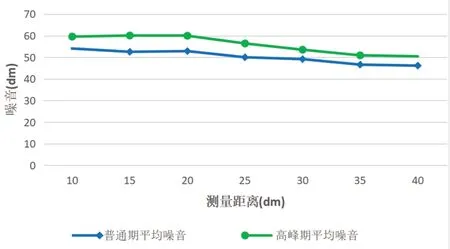
图10 熊猫基地噪音测试对比图
结合实测高峰期的测试数据,作为客观数据采用大型声场模拟分析软RAYNOISE,利用其Conical Beam Mehtod 算法、Triangular Beam Method 算法输入进行模拟分析,客观预测出噪声分布状况,同时为下一步的利用植被、地形的降噪提供出客观比对基础对象,如图11 所示。
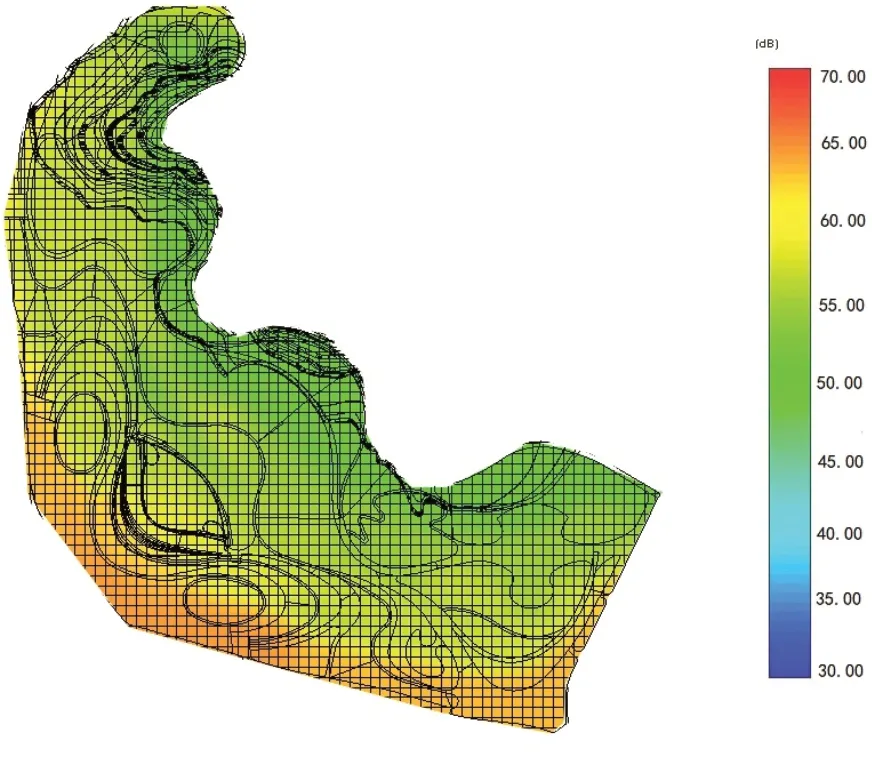
图11 噪声传播模拟图
将利用虚拟还原技术形成的生境数字底板模型[10-12]导出.dxf 格式,将其导入RAYNOISE 软件中,通过软件的计算模拟分析高峰期游客噪声,如图12 所示。当增加地形起伏和植被绕射计算后,熊猫游玩区附近的绿色区域为50-55dBA,大型乔木起到了很好的遮挡噪声的作用,绿色区域面积增加;黄色区域55-60dBA,地形起到了一定的遮挡作用,黄色区域面积少量减少。通过模拟分析合理调整地形以及生境内的植物搭配能够有效阻挡与降低游客传播噪声,让大熊猫获得一个相对安静舒适声环境。
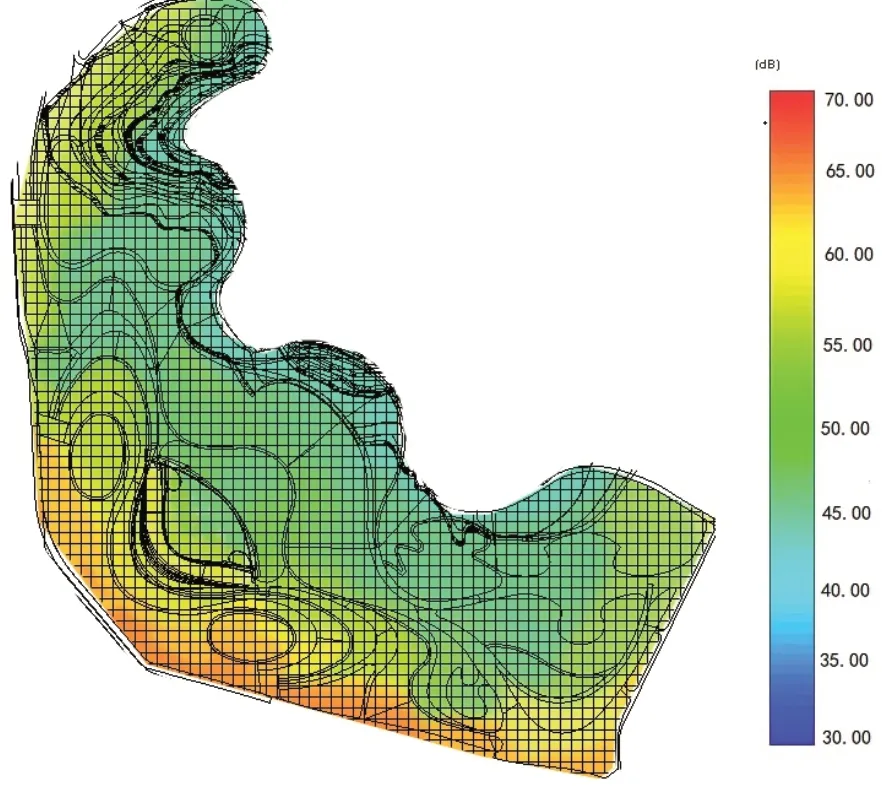
图12 数字底板噪声模拟图
4 总结与展望
本文从大熊猫栖息地生物因子、外界影响因素、植被种植环境等方面对城市栖息环境营造进行研究,实施过程中主要使用无人机+GIS 技术、AI 衍生式设计、虚拟仿真模拟等技术,结合实测数据和仿真计算进行分析,指导修正城市栖息地设计方案及植被现场施工,实现了将传统动物生境从“牢笼式”到“自然展示”转变的设计理念;同时有效地节约项目成本,保障了项目工期。实现了BIM 技术与大熊猫生态环境营造的深度融合,可为后续类似动物城市栖息地打造提供了一定的参考。