差速耦合式风-波互补发电系统的性能分析
2023-12-27商继昌邓子伟王博涵张保成
商继昌,邓子伟,王博涵,张保成
(中国海洋大学 工程学院 机电工程系,山东 青岛 266100)
0 引 言
海上风能和波浪能是2类重要的海洋可再生能源,其能流密度大、分布广、开采技术较成熟,并可实现大规模开发利用[1]。中国东部沿海地区海洋能资源丰富,许多地区非常适合海洋能开发[2],但单一种类海洋能源的开采存在输出功率不稳定、能量利用率低等缺点,而海上风能与波浪能在时间与空间上具有互补性,实现2种能源的协同耦合发电可明显降低输出功率的波动性[3]。随着世界各国对海洋可再生能源的不断重视,国内外相关学者针对海上风能与波浪能联合发电的耦合方式展开研究[4],并提出采用电器元件、液压元器件或机械机构对两股能量进行耦合的方案。
采用电器元件进行能量耦合是2个系统分别驱动发电机进行发电,然后通过整流模块对电流进行耦合:GAO等[5]在发电机后端设计一种整流回路将电能平稳耦合在一起;FIASCHI等[6]将波浪能转换装置、风能转换装置、太阳能转换装置产生的直流电通过1个变频逆变器耦合到一起,通过压缩机储存压缩空气来储存电能;谢嘉等[7]设计互补能源变换电路,并利用DC-DC斩波技术实现直流电压的稳定输出。采用液压元器件进行能量耦合是通过控制液压回路实现两股液压油汇合到一起实现能量耦合:王向志[8]将风机与浮子俘获的能量转化为液压能,再通过液压元件将两股油路汇为一路,并经稳压器稳压后驱动发电机工作;石茂顺等[9]采用压力传感器与电磁换向阀实现两股油路的交替交汇,有效降低2个能量捕获子系统的消极耦合作用;WANG等[10]通过力矩叠加器实现对风能和波浪能两种能量的耦合,并通过控制变量电机的排量降低消极耦合的影响。采用机械机构亦可进行能量耦合:WU等[11]采用棘轮机构和增补机构实现风能与波浪能的叠加和混合,该耦合方式结构简单且牢固可靠,但耦合效率还需要进一步提高;陈广庆等[12]设计一套以行星差动轮系进行能量耦合的方案,并借助MATLAB软件进行仿真分析,验证了方案的可行性。
采用电器元件进行能量耦合虽然可实现功率的平稳输出,但由于所用电器元件众多、电路布置复杂,且电力在传输过程中发热严重,因此能量损失较大。采用纯液压方式进行能量耦合会因为两股高压油的直接汇合产生极大的消极耦合影响,发电效率低,且液压管路维护成本高。采用纯机械方式对两股能量进行传输耦合会因为前端捕获功率的波动使系统中的刚性构件产生较大的冲击载荷,极大地降低系统寿命。
为进一步提高风-波互补发电系统的能量耦合效率和发电稳定性,结合当前耦合方式存在的不足,本文提出一种新型机-液差速耦合式风-波互补发电方案,该方案利用液压传输与机械耦合各自的优点,实现能量的高效耦合。为验证该方案的可行性,通过AMESim二次开发平台创建该差速齿轮机构的子模型,并构建整机仿真模型,通过校验差速齿轮机构的输出特性,验证该机-液差速耦合方案的可行性,以期为风-波互补发电提供一种新的能量高效耦合模式。
1 系统组成及工作原理
所提出的差速耦合式风-波互补发电方案采用差速行星齿轮机构对两股能量进行耦合,以提高整体系统的能量捕获效率,通过液压元器件进行能量的调节和传输,以降低能量传输过程中的波动与损耗。图1为差速耦合式风-波互补发电系统的组成及工作原理,该系统共包括4个子系统:风能捕获子系统、波浪能捕获子系统、差速耦合子系统和终端发电子系统。
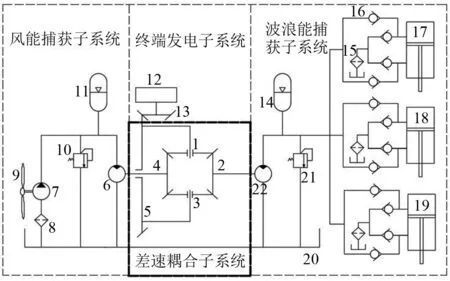
注:1.行星齿轮;2.半轴齿轮;3.行星齿轮;4.半轴齿轮;5.壳体大齿轮;6.液压电机;7.柱塞式液压泵;8.精滤清器;9.风机叶轮;10.溢流阀;11.囊式蓄能器;12.发电机;13.从动锥齿轮;14.囊式蓄能器;15.精滤清器;16.单向阀;17.双作用液压缸;18.双作用液压缸;19.双作用液压缸;20.油箱;21.溢流阀;22.液压电机
在风能捕获子系统中风机叶轮9的主轴与液压泵7的主轴通过联轴器连接,风机叶轮在旋转时带动液压泵主轴旋转,从而将捕获的风能转化为液压能,液压电机8的输出轴与半轴齿轮1的齿轮轴相连,液压电机6在转动时会将旋转力矩传递给半轴齿轮4,从而将风能捕获子系统中的液压能转化成差速耦合子系统的机械能。波浪能捕获子系统包括优化后的圆柱形浮子[13],3个浮子布置的间距各为1/3个波长,在波浪的驱动下,浮子带动与之相连的液压缸活塞往复运动,持续为高压回路供入液压油,液压电机22的输出轴与半轴齿轮2的齿轮轴相连,液压电机22在旋转时带动半轴齿轮2以相同转速旋转,从而将波浪能传递至差速耦合子系统中。差速耦合子系统由壳体大齿轮5、行星齿轮1与3、半轴齿轮4与2构成周转轮系,半轴齿轮4通过轴承与壳体大齿轮5安装到一起,2个齿轮可实现相对于各自轴线的旋转,行星齿轮1和3通过轴承安装在壳体大齿轮5上,2个行星齿轮既可以实现绕壳体大齿轮5轴线的公转,也可相对于各自轴线进行自转。半轴齿轮4与2分别将转矩传递至行星齿轮1与3上,之后在壳体大齿轮5上进行叠加。2个半轴齿轮的转矩或转速差值会驱动行星齿轮自转,从而消除2个能量捕获子系统之间的消极耦合影响。壳体大齿轮5通过与之啮合的从动锥齿轮13将耦合后的能量传递给终端发电子系统,由发电机12转化为电能。
2 差速齿轮机构动力学方程建立
差速齿轮机构的动力学关系如图2所示。
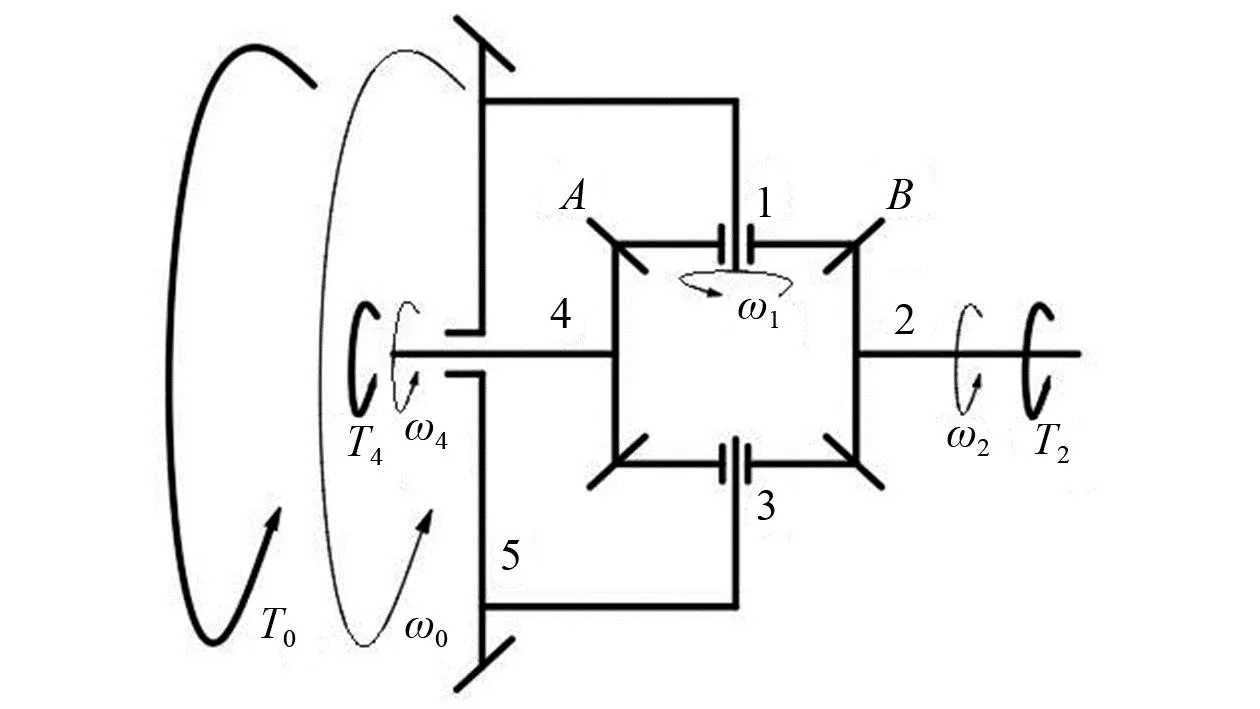
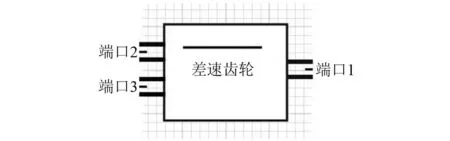
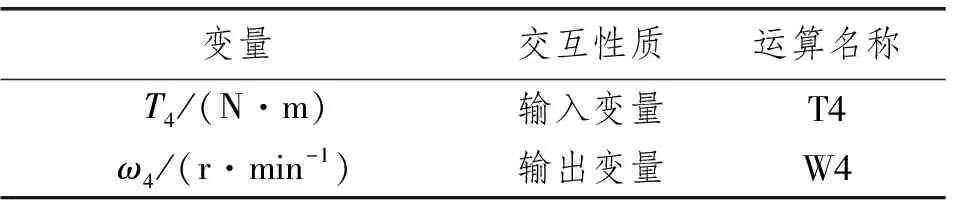
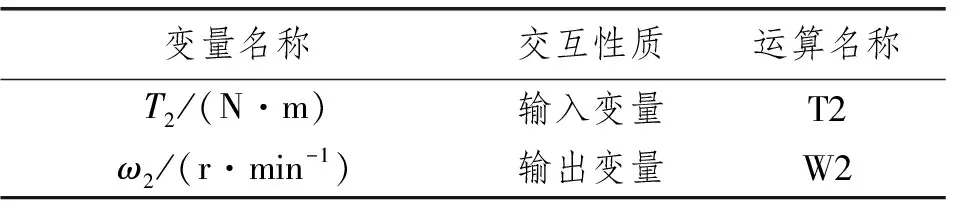
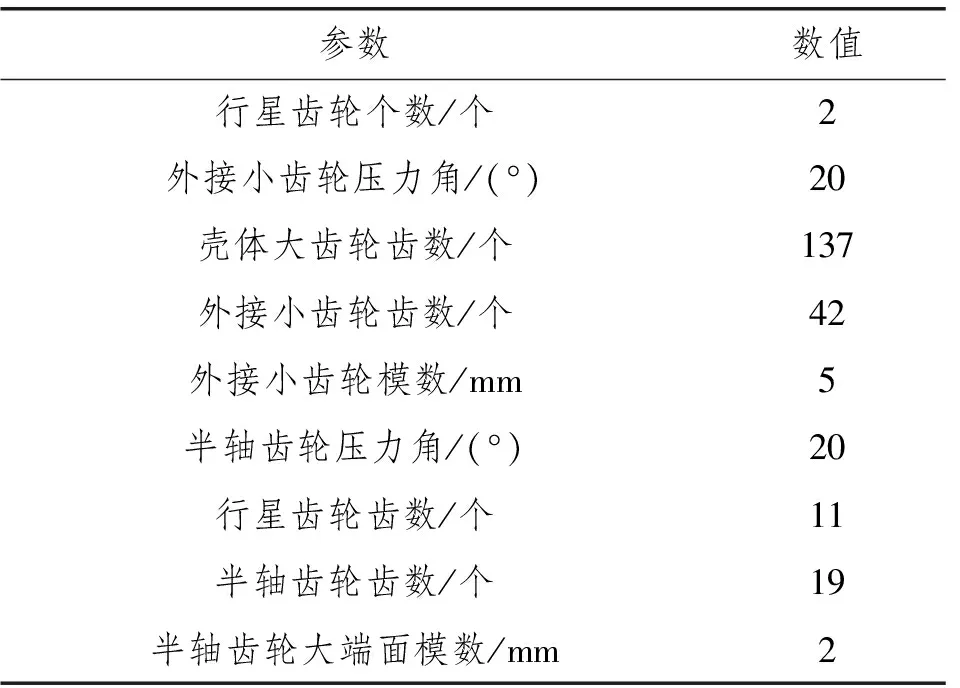
图2 差速齿轮机构动力学示例
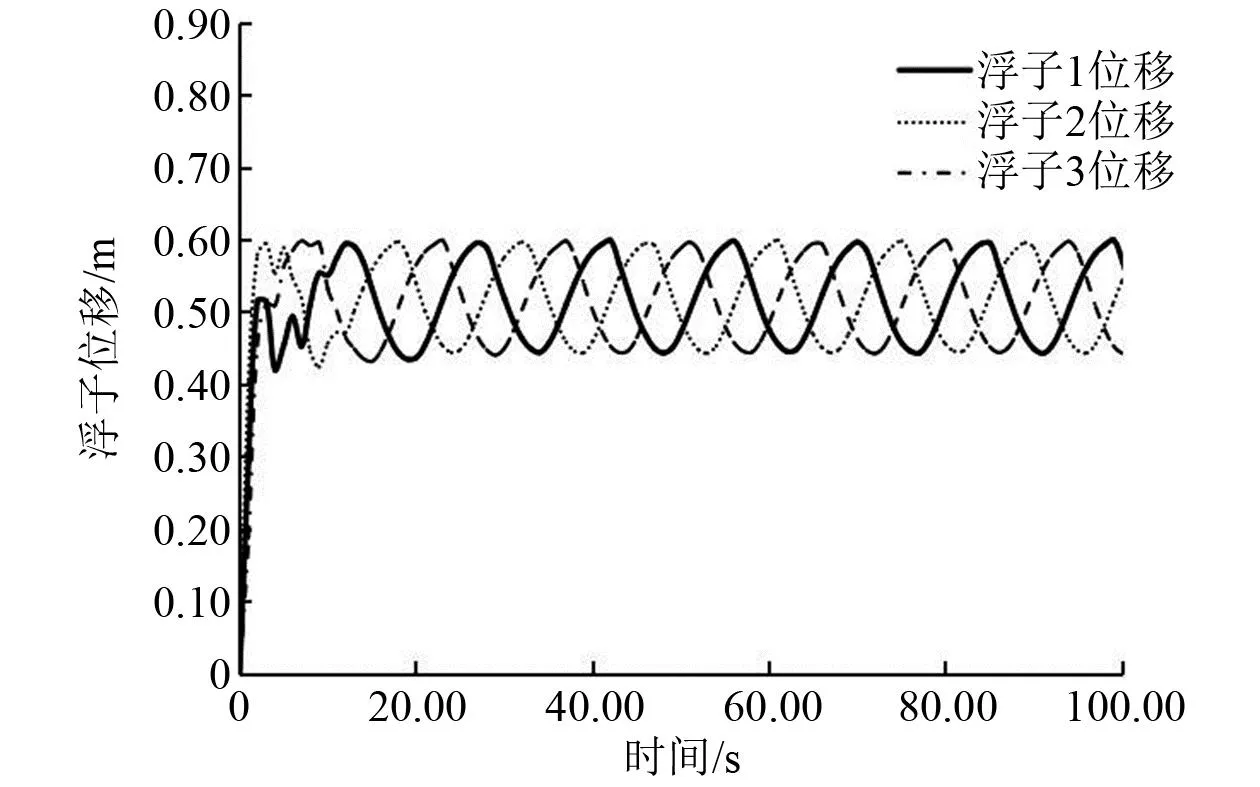
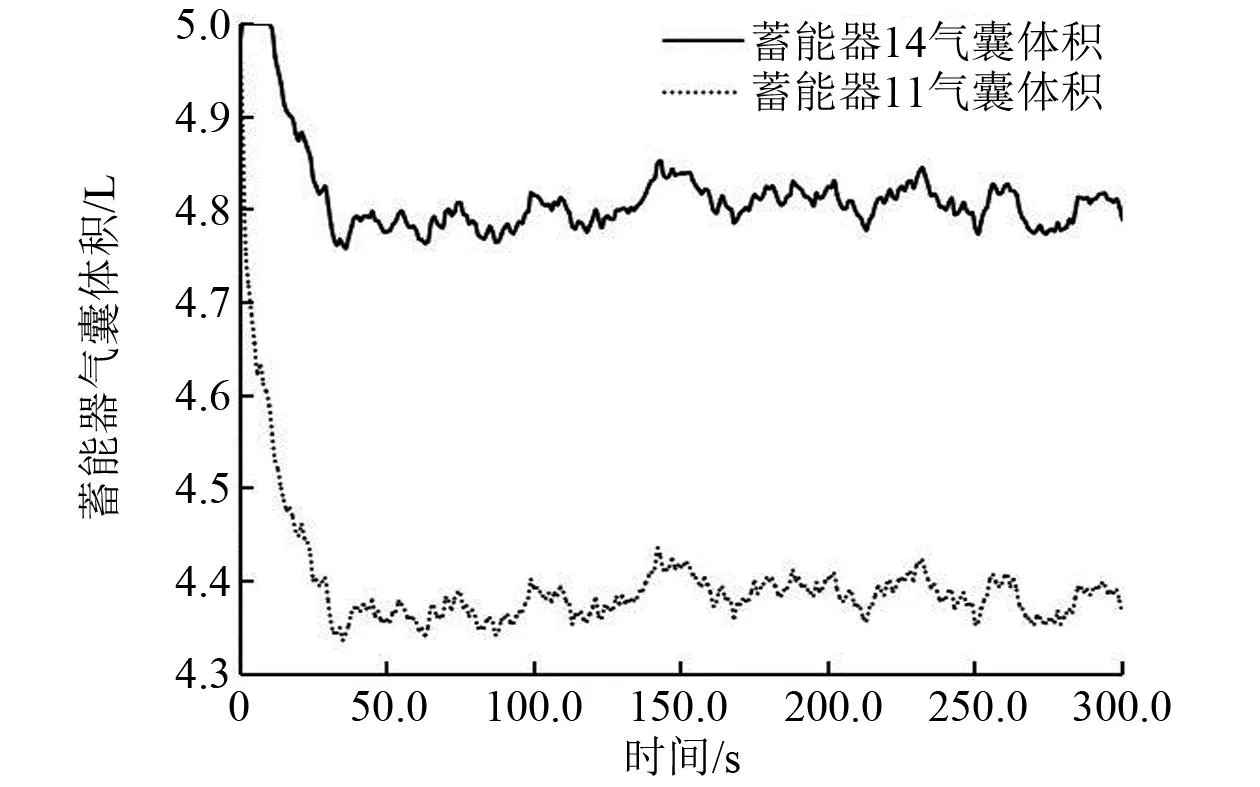
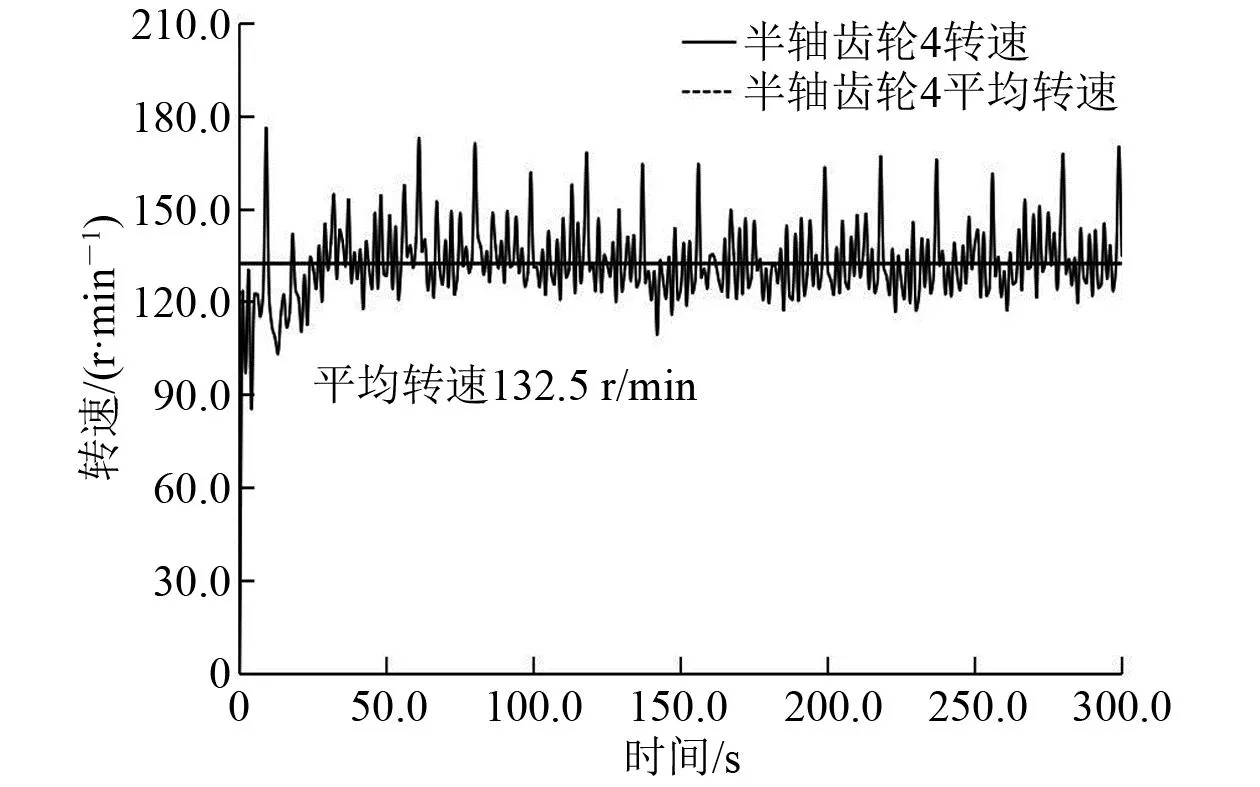
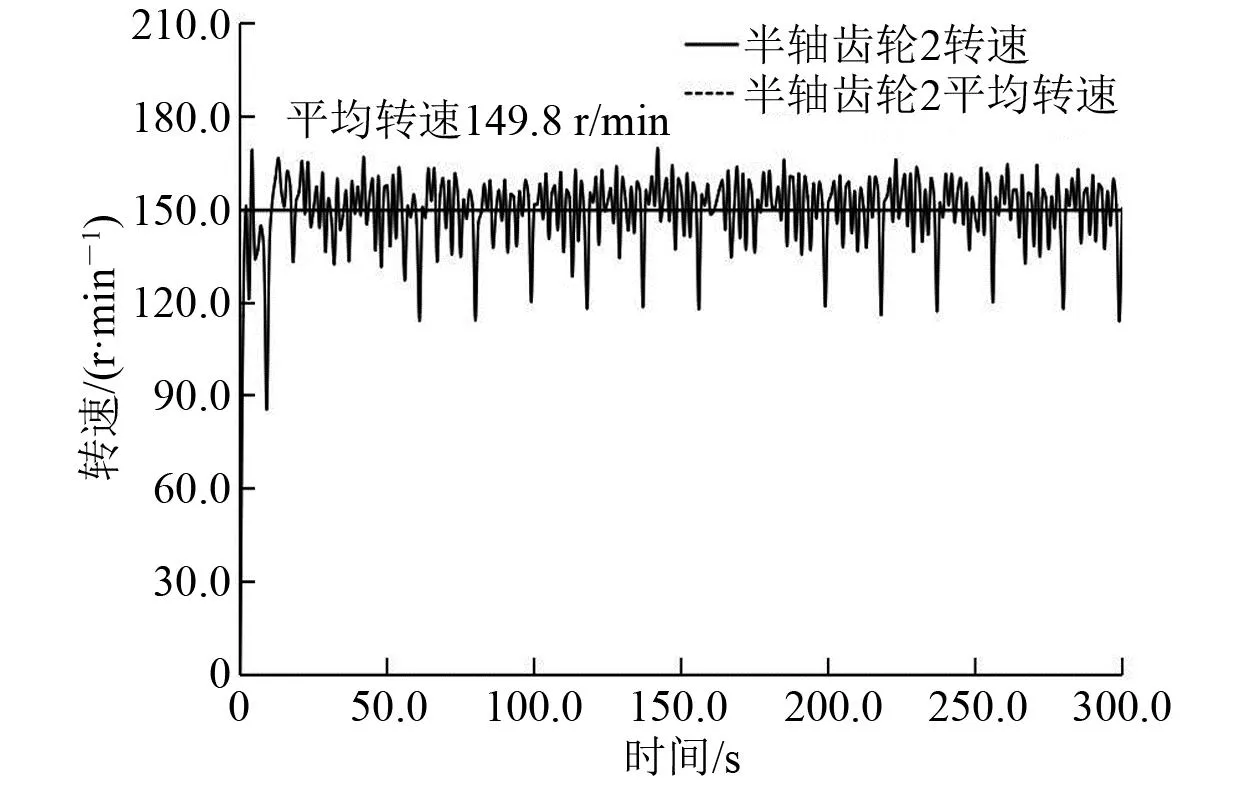
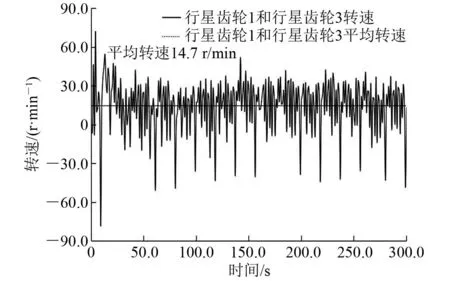
由于所提差速齿轮机构中行星齿轮1与行星齿轮3的动力学特性时刻保持一致,为减少计算量,在建立差速齿轮机构的动力学模型时假设只有1个行星齿轮1。图2中,A点为半轴齿轮4与行星齿轮1的啮合点,B点为半轴齿轮2与行星齿轮1的啮合点,设2个点的绝对速度为VA和VB(假定VA VA=ω4r4=ω0r0-ω1r1 (1) VB=ω2r2=ω0r0+ω1r1 (2) 式(1)和式(2)中:ω4为半轴齿轮4角速度,rad/s;ω2为半轴齿轮2角速度,rad/s;ω1为行星齿轮1角速度,rad/s;ω0为壳体大齿轮角速度,rad/s;r4为半轴齿轮4分度圆半径,m;r2为半轴齿轮2分度圆半径,m;r1为行星齿轮1分度圆半径,m;r0为壳体大齿轮与行星齿轮啮合点运动轨迹半径,m。 对于半轴齿轮4输入转矩T4有: T4=FAr4 (3) 式中:FA为行星齿轮在啮合点A处对半轴齿轮4的作用力,N。 对于半轴齿轮2输入转矩T2有: T2=FBr2 (4) 式中:FB为行星齿轮在啮合点B处对半轴齿轮2的作用力,N。 对于壳体大齿轮输出转矩T0有: (5) 对于行星齿轮有: (6) (7) 联立上述公式并代入化简可得到半轴齿轮4、2的角速度: (8) (9) AMESim软件自带的模型库已涵盖相关领域常见的元器件模型[14],但所提出的差速齿轮机构与AMESim汽车库与传动库中的差速齿轮机构在结构上差异较大,且接口数据传输逻辑难以适用,因此采用AMESet二次开发平台,依据第2节所建立的差速齿轮机构动力学关系对所提出的差速齿轮机构进行子模型开发与封装,并与风能捕获子系统和波浪能捕获子系统连接在一起,从而建立该新型风-波互补发电系统的仿真模型。 在AMESet模块下建立的差速齿轮机构属于机械零部件,接口类型为机械接口,如图3所示。 图3 差速齿轮子模型示例 端口1用于连接后端发电机,其中参数数量为3个,相关参数如表1所示。端口2和端口3分别用于连接风能捕获子系统中液压电机的输出轴和波浪能捕获子系统中液压电机的输出轴,相关参数如表2和表3所示。 表1 端口1参数设置 表2 端口2参数设置 表3 端口3参数设置 C语言求解过程的主程序为 #include #include #include #include "ameutils.h" #define _SUBMODELNAME_ "DIFFERENTIAL" } void differential_(int *n,double *T0,double *W0,double *W4 ,double *T4,double *W2,double *T2,double *W1,double *W1dot) { /* Common-> SI units conversions.*/ *W0 *= 1.04719755119660e-01; *W1 *= 1.04719755119660e-01; /* >>>>>>>>>>>>Calculation Function Executable Statements.*/ *T0=(*T4)+(*T2); *W1dot=((*T4)-(*T2))*0.011/0.019/(0.0000242*2); *W4=(*W0)+(11/19)*(*W1); *W2=(*W0)-(11/19)*(*W1); /* <<<<<<<<<<< /* SI-> Common units conversions.*/ *W0/= 1.04719755119660e-01; *W2/= 1.04719755119660e-01; *W1/= 1.04719755119660e-01; *W1dot/= 1.04719755119660e-01; } 基于AMESim仿真平台,集成风能发电系统、波浪能发电系统、差速齿轮机构和发电机,连接相应的端口,构建该差速耦合式风-波互补发电系统整体仿真模型,如图4所示。 图4 风-波互补发电系统仿真模型 在该模型中,风能发电系统中的风速数据由MATLAB/Simulink导入,并通过AMESim信号库中1D表格模块导入仿真模型中,波浪能发电系统由3个液压缸活塞位移信号作为能量输入。在进行仿真时,2个发电子系统会分别向差速齿轮机构子模型的端口2和端口3输入转矩信号,发电机亦向该子模型的端口1输入转矩信号,差速齿轮机构子模型会根据内部运算程序分别计算半轴齿轮4、半轴齿轮2、行星齿轮1、行星齿轮3和壳体大齿轮5的转速,并将相应参数传递给2个发电子系统和发电机,从而形成完整的数据流。 为评估所提差速齿轮耦合方案的效能,选取已有的工程对象,即以20 kW为系统额定输出功率,风能、波浪能两个子系统的能量转化功率分别为10 kW,以青岛斋堂岛西南海域为工作海域,平均风速为10 m/s,水深为30 m,平均波高为0.6 m,波浪周期为3.3 s。匹配设计差速耦合子系统,其差速齿轮机构主要参数如表4所示。 成语中名词意动用法的现象还有很多,比如“幕天席地”中的“幕”和“席”、“草木皆兵”中的“草”和“木”等,都是名词的意动用法,都可以按照“认为宾语为谓语”的格式进行解释。 表4 差速齿轮机构主要参数 浮子位移曲线如图5所示,3个浮子的位移在前5秒内快速达0.5 m,且在之后的时间内基本在0.45~0.60 m垂荡运动,这是由于浮子在刚受到波浪力时液压回路内的压力小,浮子所受的PTO(Power-Take-Off)反力也很小。由图5可知,对浮子布置位置进行优化使3个浮子运动位移存在一定的相位差,弥补单个浮子速度为零时高压管路中流量为零的缺点,提高液压系统的输出稳定性。 图5 浮子运动位移 在液压系统中2个蓄能器的气囊体积变化如图6所示。由图6可知,在蓄能器系统启动之初,随着液压管路内压力逐渐增大,气囊体积逐渐减小,且在第20 s左右进入稳定状态。蓄能器11的气囊体积小于蓄能器14的气囊体积,这是因为2个液压回路选用的液压电机的排量不同,在电机输出转矩相近的情况下,排量大的一方系统的压力越小。 图6 蓄能器内气囊体积 图7和图8分别为半轴齿轮4和半轴齿轮2的转速。 图7 半轴齿轮4转速 图8 半轴齿轮2转速 由图7和图8可知,2个半轴齿轮的转速波动幅度都比较大,半轴齿轮4和半轴齿轮2的平均转速分别为132.5 r/min 和149.8 r/min。由式(8)和式(9)可知,2个半轴齿轮转速波动性较大主要由2个半轴齿轮输入力矩存在差异导致。 行星齿轮1和行星齿轮3的转速如图9所示。由图9可知,行星齿轮的转速存在较大的波动性,且行星齿轮1和行星齿轮3的转速与2个半轴齿轮的输入转矩的关系由式(7)给出,当2个半轴齿轮的输入转矩存在差异时,行星齿轮便会自转,并通过半轴齿轮4和半轴齿轮2的差速运转降低2个子系统的消极耦合影响。 图9 行星齿轮转速 壳体大齿轮的转速如图10所示。由图10可知,壳体大齿轮平均转速为141.2 r/min,介于2个半轴齿轮转速之间,且存在一定的波动性,但波动性与2个半轴齿轮相比大幅降低,这是因为通过2个半轴齿轮的差速运转,液压系统会自动调节2个半轴齿轮的输入转矩使壳体大齿轮所受转矩趋于稳定。在本方案中壳体大齿轮转速的波动特性即为终端电机转子转速的波动特性。 图10 壳体大齿轮转速 系统的输出功率由作用在发电机主轴上的转矩与角速度相乘得到。如图11所示,差速耦合发电系统的平均发电功率为18.4 kW,将输出功率与目标功率20 kW相比可得该系统的发电效率为92.0%,2个系统的独立发电总功率平均值为16.9 kW,发电效率仅84.5%。可见通过差速齿轮机构进行两股能量耦合可使发电效率提高近7.5个百分点,且可有效抑制由浮子振荡造成的发电功率高频波动。 图11 差速耦合式风-波互补发电系统输出功率 针对海上风-波互补发电系统能量耦合效率低、输出功率不稳定的问题,设计一种采用差速齿轮机构实现对2种能量进行耦合的方案,建立差速齿轮机构的动力学方程,在AMESet二次开发平台上创建差速齿轮子模型,利用AMESim构建风-波互补发电系统整体模型,并对该系统的能量耦合性能和发电波动性进行仿真分析。经过建模仿真和方案的可行性分析,所得结论如下: (1) 该系统平均发电功率为18.4 kW,发电效率为92%,验证了所设计的差速耦合式风-波互补发电系统有较高的能量综合捕获效率。 (2) 差速齿轮机构对风-波互补发电系统进行能量耦合后,可有效降低与发电机输入轴相连的壳体大齿轮转速波动,输出功率的高频波动得到有效抑制。
3 风-波互补发电系统仿真模型搭建
3.1 差速齿轮机构子模型搭建

3.2 风-波互补发电系统仿真模型构建

4 系统工作性能分析
4.1 浮子及液压系统运行特性
4.2 差速齿轮机构运行特性

4.3 系统输出功率

5 结 论