基于超螺旋二阶滑模理论的直流微电网母线电压控制
2023-12-25吴博宁高志强周雪松马幼捷王成龙
吴博宁,高志强,周雪松,马幼捷,王成龙
( 天津理工大学电气电子工程学院,天津 300384)
0 引言
国内外研究表明,相比于交流微电网,直流微电网在系统可控性、经济性以及供电质量方面具有更加优越的性能[1-4]。
如何抑制直流微电网母线电压波动,保证系统稳定运行,是直流微电网领域研究的热点问题之一[5-7]。当直流微电网与交流电网相连时,往往是通过优化三相AC-DC 双向变流器的控制系统来实现对母线电压的控制。但在对变流器进行建模和控制时,变流器所带负荷通常是复杂多变的,输入侧的电阻、电感、电容参数是不能精确测量的,而且随着时间的推移还会出现一定程度的老化,存在参数摄动[8〗。因此,要保证直流微电网母线电压恒定,就需要控制器对时变的直流负载以及参数摄动具有良好的鲁棒性。
滑模控制是一种典型的非线性控制方法,它不依赖于被控对象精确的数学模型,对负载波动、参数摄动具有较强的鲁棒性,近年来被广泛应用于电机、整流器等系统中[9-10]。但在传统的滑模控制方法中,需要较大的控制增益来提高系统的动态性能,过大的增益和控制的不连续性使得系统存在一定程度的抖振,严重影响了滑模控制在实际工程中的应用。
为削弱抖振影响,文献[11-13]提出了一种变趋近律滑模控制方案,通过状态变量偏差信号的大小来修正滑模切换项增益;文献[14-15]将模糊控制与滑模控制相结合,利用模糊规则来调整更新滑模切换项增益。上述控制方法,本质上都是通过不断调整、减小不连续滑模切换函数的增益来抑制系统的抖振,虽在一定程度上达到了抑制抖振的目的,但同时也增大了控制器的复杂程度,不利于滑模控制的进一步工程推广。高阶滑模控制在保持传统滑模算法设计简单、易于实现、鲁棒性强等优点的同时,还能够有效地抑制系统抖振,因此,成为了解决滑模抖振的新型控制方法。
文中针对高阶滑模控制在直流微电网系统中应用较少的情况,将超螺旋( Super-Twisting,ST) 二阶滑模控制算法应用于直流微电网三相AC-DC 双向变流器控制系统中的电压外环,以此来提高系统对负载波动、参数摄动等不确定性因素的鲁棒性。最后,通过数字仿真验证了该制策略的可行性与正确性。
1 三相AC-DC 变流器数学建模
直流微电网的电路拓扑如图1 所示。
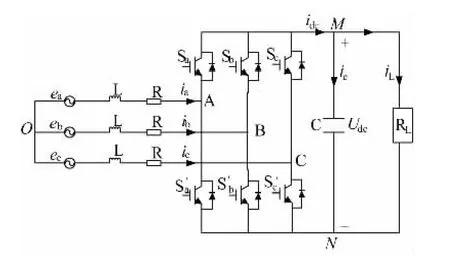
图1 AC-DC 变流器电路拓扑Fig.1 AC-DC converter circuit topology
为得到更加简明的直流微电网三相AC-DC 变流器数学模型,结合实际的电力系统,作如下假设:
1) 交流侧电源是无穷大电源;
2) 交流系统是三相对称系统;
3) 功率开关管是理想器件,无过渡过程、无功率损耗、无死区效应。
图1 中,ea,eb,ec为等效交流电源;ia,ib,ic为交流侧线电流; R 为线路等效电阻;L 为线路等效电感;C 为直流侧滤波电容;Udc为直流侧电容器两端电压;idc为直流侧两端电流;ic为流过电容器两端电流;iL是流过负载两端的电流; RL是直流微电网的等效负荷;Si是开关函数。
根据直流微电网三相AC-DC 变流器的电路拓扑图,由基尔霍夫定律,可得三相AC-DC 双向变流器在a,b,c 三相静止坐标系下的数学模型为:
其中:
由于交流测电流是非线性时变强耦合的,不利于控制器的设计。因此,为简化控制器设计,需采用坐标变换,将三相静止坐标系变为两相旋转坐标系,具体变换矩阵为:
式中θ 为旋转坐标系d轴与静止坐标系a 轴的夹角。
联立式(1) ~式( 4) 可得三相AC-DC 变流器在二维旋转坐标系下的数学模型为:
其中:
式中ed、eq、id、iq、Sd、Sq为三相AC-DC 变流器交流侧电压矢量、电流矢量、开关函数在旋转坐标系dq轴上的分量。
设U*dc为母线电压给定,定义电压误差状态变量x
式(8) 两边对时间t求导,得:
将id改写为i*d ,用以表示id同时作为电压外环控制变量和电流内环给定指令两个含义。将式( 9) 改写为式(10) 所示的状态方程:
式中w为未知的外部扰动,将设w可微,且其微分有界。
2 控制器设计与稳定性证明
2.1 超螺旋二阶滑模控制简介
二阶滑模之所以可以抑制抖振,是因为二阶滑模将实际控制输入u(t) 的微分信号u·(t) 虚拟成为新的控制变量。通过设计不连续的虚拟控制u·(t) 来确保滑模变量s能够在有限的时间收敛于零,并保持二阶滑动模态,即s =。而实际控制输入u(t) 则是通过对虚拟控制(t) 求积分得到的,因此实际控制输入u(t)是连续的,从而有效地削弱了系统的抖振。
当系统状态方程与控制律u(t) 的相关度r≥1时,则控制器可以简化为:
式中ε、κ、ρ 为控制器参数。
从式(12) 可知,超螺旋二阶滑模算法的实现不需要知道任何关于滑模变量的微分信号。同时,根据文献[16-17],当ρ=1 时,系统将得到指数稳定的二阶滑模;当ρ=0.5 时,系统将最大可能实现二阶滑动模态。
2.2 超螺旋二阶滑模控制器
通过式(9) 、式(10) 可知,直流微电网三相AC-DC双向变流器的状态方程与控制变量id的相关度为2。根据式(12) ,取ρ=0.5,可得超螺旋二阶滑模的控制律为:
式中s为滑模变量,ε、κ 为控制器参数。
选取电压的偏差信号以及偏差信号的微分信号作为滑模函数的状态变量,则可得滑模面为:
根据霍尔维茨稳定性判据,只需要c >0 ,系统式(14) 就是大范围渐近稳定的。
针对式(10) 设计基于超螺旋的二阶滑模控制律:
式(14) 两边同时对时间求导得:
联立式(8) 、式(10) 、式(15) 、式(16) 可得:
令:
联立式(17) 、式(18) ,得:
从式(19) 可知,在控制器参数整定的过程中,可将实际系统的控制增益b2融入到参数α、β 的调节,而无需关注b2是否已知,这样只许调整κ,ε,使其满足式(19) 的稳定性要求即可。进一步的说明了超螺旋二阶滑模控制的实现不依赖于被控对象精确的数学模型。
联立等式( 14) 、式( 15) ,可得二阶滑模的控制器框图,如图2 所示。

图2 二阶滑模控制框图Fig.2 Block diagram of second-order sliding mode control
2.3 稳定性证明
令:
记(f(t) )' = g(t) ,则式(19) 可以被改写为:
至此,把超螺旋二阶滑模稳定性问题转化成为了式(21) 在平衡点是否大范围渐进稳定。
对于式(21) 所示系统,定义Lyapunov 函数如下:
式中ηT= [η1,η2]=;P 为正定实常数矩阵。
式中A=。
根据转置矩阵的性质,可知:
对Lyapunov 函数求导,联立式(23) 、式(24) 可得:
进而整理可得:
当α>0 ,β>0 时可知,矩阵A 是Hurwitz 矩阵,对于任意给定的正定矩阵Q,一定存在着一个正定矩阵P 满足式(27) :
记V1(z1,z2)=ηT( ATP+PA) η=ηTQη,因为V1(z1,z2) 是二次正定函数,所以有:
结合实际的电力系统与式(10) 中的假设,可认为g(t) 为有界函数,不妨设g(t) <L,故而一定存在一常数μ>0 ,使得不等式(28) 成立。
根据2 范数的定义与性质可知:
联立式(25) ~式(30) 可得:
3 仿真分析
为了验证所设计的二阶滑模控制器的控制效果,文中采用了控制变量的分析方法,即仅电压环控制器不同,其余变量和参数均相同。用Matlab/Simulink 搭建了如图3 所示的直流微电网,系统参数和控制器参数如表1 和表2 所示。

表1 系统参数Tab.1 System parameters
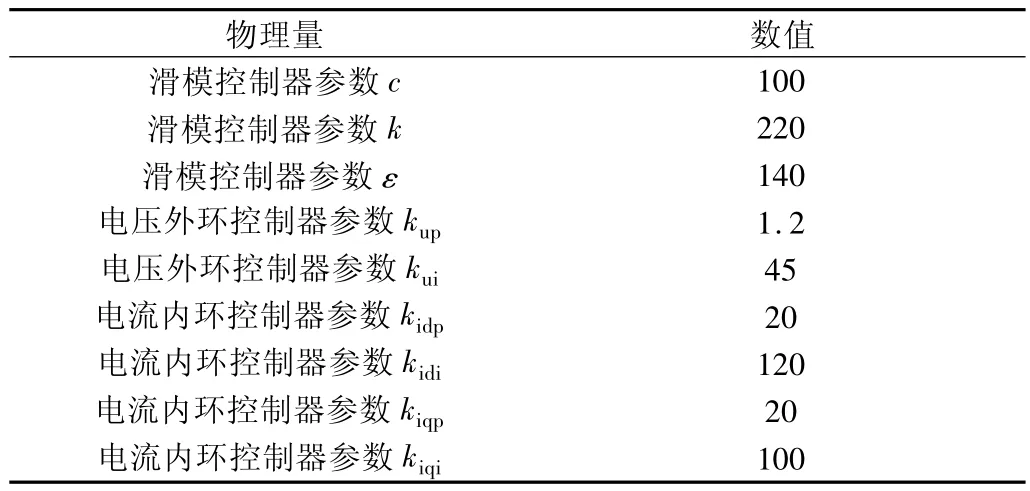
表2 控制系统参数Tab.2 Parameters of control system
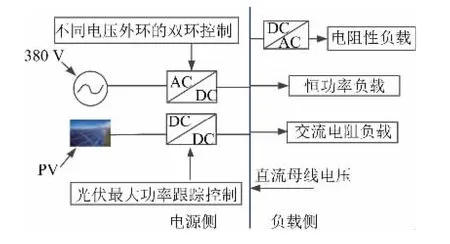
图3 直流微电网Fig.3 DC micro-grid
图4为两种控制器在仿真期间的总体控制效果图。从图4 可知,与PI 控制器相比,文中设计的超螺旋二阶滑模控制器在启动特性、负载突变、参数摄动、光伏并网等工况下都具有较大的优势。下面将从上述几个方面详细介绍二阶滑模控制器。
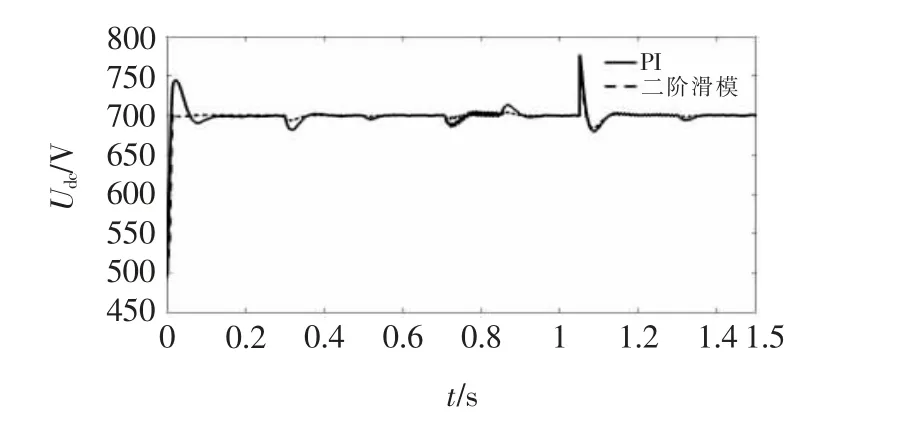
图4 总体控制效果图Fig.4 Overall control effect
(1) 两种控制器的启动特性比较。
图5为直流微电网三相AC-DC 双向变流器采用不同控制策略带载启动时的母线电压波形图。从图5 中可知,一方面,两种控制器控制下的系统上升时间是相同的,但二者的超调量却相差甚大,其中二阶滑模控制器控制下的系统的超调量几乎为零,而PI 控制器控制下的系统的超调量为6.4%。根据PI 控制器比例增益的物理意义可知,如果想要继续减小超调量,就要调小比例增益,但这会增大上升时间,不利于系统的快速启动。另一方面,二阶滑模控制下的系统,当母线电压到达额定电压700 V 时,就基本维持在额定电压附近,几乎无暂态过程,而PI 控制器还需要经过一系列的过渡过程才能维持在额定电压附近。综上所述,二阶滑模控制器相比于PI 控制器在启动特性和鲁棒性方面更具有优势。
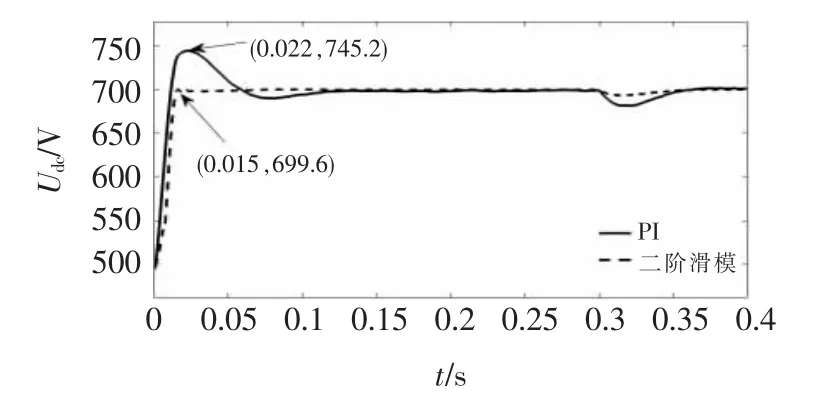
图5 采用不同控制方式系统启动时母线电压波形Fig.5 Voltage waveform of bus when the system starts up with different control modes
(2) 负载骤减。
母线电压维持在700 V,直流侧电阻性负载在0.3 s 时突然减半,母线电压波动如图6 所示; 系统稳定运行,恒功率性负载在0.5 s 时突然减半,母线电压波动如图7 所示。
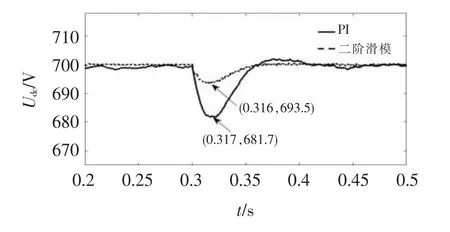
图6 直流侧电阻性负载减半时的电压波形Fig.6 Voltage waveform of half reduction of DC resistive load

图7 直流侧恒功率性负载减半时的电压波形Fig.7 Voltage waveform of constant power load on DC side reduced by half
当负载电流突然减小时,由于电容两端的电压不能突变,所以直流侧电流idc的变化要滞后于负载电流iL的变化,因此流过电容两端的电流ic要减小。根据式(32) 可知母线电压要发生跌落。
从图6 和图7 可知,二阶滑模控制下的系统的过渡过程时间和电压振荡范围都要小于PI 控制策略。因此,二阶滑模控制策略在负载波动下能够很好的抑制直流母线电压波动,缩短系统的过渡过程时间。
(3) 参数摄动。
母线电压维持额定值700 V,在0.7 s 时,交流侧a相线路电阻突增至2.5 Ω,在0.85 s 时,参数摄动消失,母线电压波动如图8 所示。
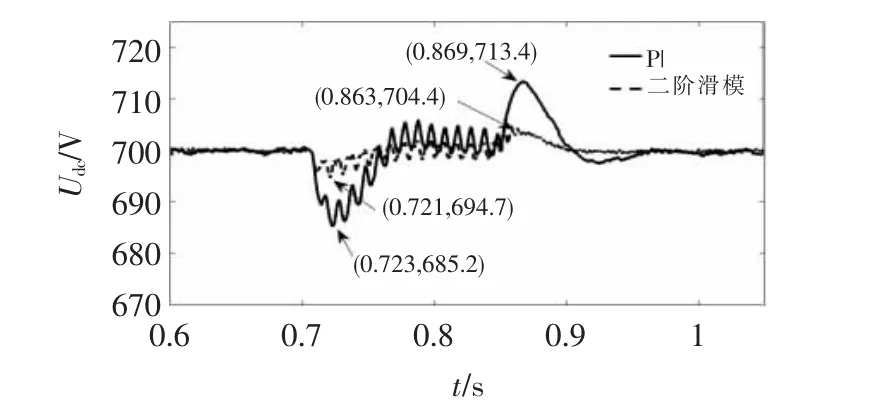
图8 参数摄动时母线电压波动图Fig.8 Bus voltage fluctuation with parameter perturbation
当交流侧参数发生摄动时,二阶滑模控制器的电压波动更小;当参数摄动消失时,二阶滑模控制器的超调和快速性均优于PI 控制器。因此,二阶滑模控制策略在交流电网发生参数摄动时可以更好的稳定公共直流母线电压,保证系统能够以较快的速度恢复稳定。
(4) 光伏并网。
母线电压维持额定值700 V,在1.05 s 的时候,光伏系统接入微网,母线电压波动如图9 所示;系统稳定运行,在1.3 s 的时候光照强度由1000 W/m2骤减至100 W/m2,母系电压波动如图10 所示。
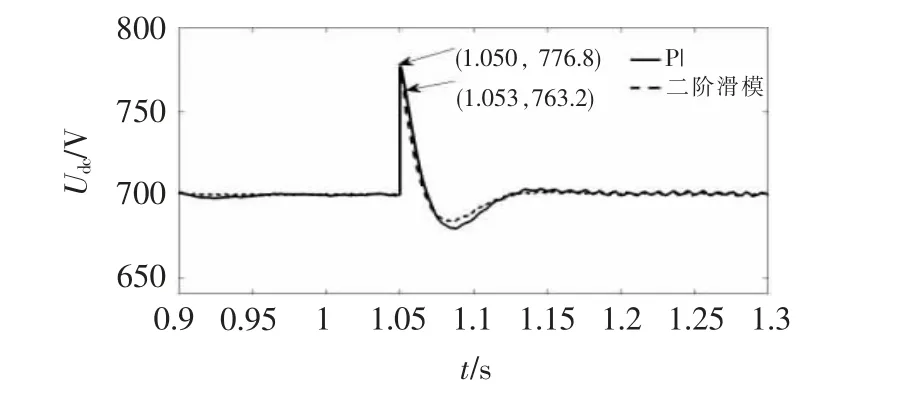
图9 光伏并网母线电压波形图Fig.9 Voltage waveform of photovoltaic grid-connected bus
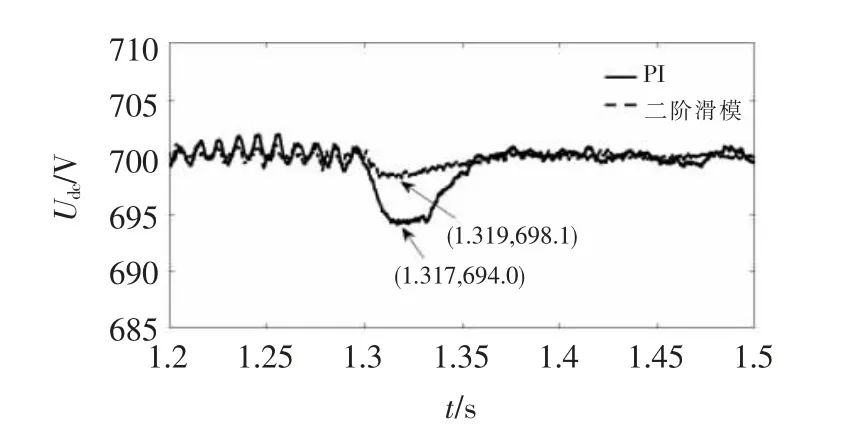
图10 光照骤减母线电压波动图Fig.10 Bus voltage fluctuation diagram with sudden decrease of illumination
根据能量守恒定律—系统输入功率等于系统消耗功率,当光伏并网时,系统输入侧能量激增,而直流侧恒功率负载消耗功率恒定,电阻性负载有限,只能将过剩的能量转存至电容,根据式(33) 可知,母线电压会升高。
同理,根据能量守恒定律,当光照强度减小,输入侧能量骤减,由式(33) 可知,母线电压会下降。
综上,由图9 和图10 可知,无论是光伏并网还是光照强度骤减,二阶滑模控制下的系统的动态品质都要优于PI 控制器。因此,二阶滑模控制器更加适用与光伏系统并网。
4 结束语
文中结合直流微电网三相AC-DC 双向变流器的数学模型,通过选取合适的滑模面,设计了一种超螺旋二阶滑模控制器,并将其应用于直流微电网三相ACDC 双向变流器控制系统中的电压外环,并从理论上证明了该控制器的设计的合理性与正确性。最后,数字仿真结果表明,该控制器在削弱传统滑模控制器抖振的基础上,有效地克服负载波动,参数摄动等不确定因素对母线电压造成的影响,能够更高效地接纳分布式电源并网,保证了负载的即插即用。
