基于相位补偿的配电网30°合环环流抑制技术
2023-12-25李闯刘永强马中静邵云峰范益民
李闯,刘永强,马中静,邵云峰,范益民
(1. 北京理工大学自动化学院,北京 100081; 2.国网山西省电力公司吕梁供电公司,山西 吕梁 033000)
0 引言
近年来,随着经济社会的不断发展,人们对配电网供电可靠性的要求日益增高,同时,随着各种敏感负荷的增加,电能质量越来越受到人们的重视。
我国的配电网主要采用的运行模式是“闭环设计,开环运行”。在一些情况下没有办法满足部分地区对于配电网可靠性的严苛需求,而低压配电网合环的安全性直接影响着调度中心的工作效率与用户的用电质量[1]。在电网合环过程中,两条线路处于并联运行时,若线路电压差较大,将产生环流,容易引发线路过载和继电保护装置动作[2]。文献[3]提出了一种基于超导储能的电磁合环环流抑制技术。并通过仿真验证了在合环两侧负荷不同和变压器参数设置不同情况下超导储能装置对合环后馈线中电磁环流具有抑制效果。
但是由于电网布局设计等因素,造成的一类35 kV电站由于进线端分别来自110 kV 电站的中压侧( 三角型连接) 和220 kV 电站的高压侧( 星型连接) ,二者存在30°的相位差,现有技术无法实现直接合环,使得调度员只能进行停电倒负荷操作,停电时间短则数分钟,长则数天,严重影响了用户的用电质量,大大减少经济效益。经调研,如表1 所示,应用此种接线方式的35 kV电站仅在山西省就有147 座,其中绝大多数电站在进行合环操作时,都需要首先对负载进行停电,之后再将待闭合的线路接入,该过程避免了两条线路的并联,可以消除环流。但带来的问题是负载将受到停电的影响。

表1 山西省存在30°相位差的35 kV 变电站Tab.135 kV substation with 30° phase difference in Shanxi Province
一种解决方案是增加全功率移相变压器,以消除30°的相位差,目前已在小部分的电站进行试运行。但是,由于全功率移相变压器的容量与线路容量相同,成本偏高,且其设计只能固定补偿30°相位差,仍然需要电力调度人员凭借计算及操作经验进行合环操作,因此并没有得到普遍的应用。
背靠背变流器具有控制方便、输出灵活、可实时动态输出所需电压波形等优点,由PWM 整流器和PWM逆变器两部分组成。文献[4]提出了一种基于合成矢量线性化解藕的控制方案,解决了dq坐标系下变量之间的藕合问题以及因网侧滤波电感数值突然改变而造成系统不稳定以及网侧电流畸变严重的问题,设计了PWM 整流器的双环控制方法。文献[5]分析了PWM整流电路的模型和两种控制策略的原理,分析了传统双闭环非解藕策略不能消除电流静差的原因,说明了解藕控制策略具有双闭环均能实现无静差、稳态电压好、功率因数更高等优越性。文献[6]将背靠背变流器接入配电网,结合瞬时正负序分量分解算法,提出了一种可消除由配网不对称运行引起的微网电压不平衡方法,达到了改善低压微网电压质量的目的。文献[7]基于电压型PWM 逆变器电压电流双闭环控制框架,针对电流环的交叉耦合问题,提出了一种内模解耦方法以提高PWM 逆变器动态过程中的解耦效果。文献[8]提出了一种改进的SVPWM 逆变算法,避免了复杂的坐标变换和三角函数计算,基本电压矢量的作用时间可以用统一公式进行计算,解决了传统SVPWM 算法计算复杂的问题。文献[9]论述了背靠背结构的变流器能够实现直流电压可控,并具有能量双向流动、有功功率和无功功率可独立控制、网侧电流正弦度高等优点。文献[10]介绍了四象限变流器的扩展应用及其关键技术,进一步提升了四象限变流器的耐压等级和开关频率等指标。
文中提出一种结合串联移相变压器( 静态补偿) 和四象限变流器( 动态补偿) 的方案。静态补偿部分使用串联移相变压器,能够实现30°的相位补偿,并且相较于传统全功率移相变压器,所设计的串联移相变压器通过的功率减半,使成本得到有效降低。动态补偿环节使用四象限变流器,其输出电压和相位均可实时动态调整。
1 系统方案设计
1.1 问题分析
进行合环操作时,电力环网将会形成环流。在环流过大时,将会造成限度过载或者继电保护装置的误动作,这将直接影响电力系统的稳定性[11]。在合环操作进行时,在很短的时间内将会产生一个大电流暂态过程。在这个暂态过程中很有可能会发生过电压和冲击电流过大等影响,会使得继电保护装置误操作。而当系统由暂态最终到达稳态后,就会形成一个稳态潮流,但是,当稳态潮流过大时,就会导致线路过载等一些问题,这同样也会降低电网运行可靠性[12]。
在常规电力系统中,两条相同电压等级的线路合环之后产生的环流度主要受合环时刻的电压相位以及两条线路之间的压差决定[13]。按照现行电力系统的运行规则可知,一条电力线路与额定电压之间的偏离一般在±5%以内,通过一定的调压手段,例如调整变压器抽头位置等可以有效的减小两条待合环线路的电压差,从而降低合环过程产生的环流,实现不停电倒负荷操作[14-15]。
文中是针对35 kV 配电网中两条线路存在30°相位差的场合,如图1 所示,由于变压器两侧星形连接和三角形连接的不同,从而使A、B 两接线端之间产生了30°相位差。

图1 系统结构示意图Fig.1 Schematic diagram of system structure
1.2 基于动态补偿和静态补偿的环流抑制方案设计
当两条35 kV 的线路存在30°相位差的时候,可以计算其稳态环流表达式为:
其中,Z∑为环路的电抗,可以看出此时会产生巨大的环流电流,因此必须对两条线路的电压之差进行补偿,实现合环前后两条线路的电压之差维持在较小的幅值内,达到减小和消除环流的目的。
为了实现消除35 kV 配电网中两条电力线路存在30°相位差的问题,设计了如图2 所示基于串联变压器和四象限变流器的环流抑制方案。

图2 方案设计示意图Fig.2 Schematic diagram of scheme design
首先利用串联变压器实现静态补偿,在线路中串联移相变压器,对电网电压进行补偿,该环节称为静态补偿。其作用是补偿35 kV 电站两进线端之间存在的30°相位差。经过静态补偿之后,即将进行合环操作的两条线路的电压已基本相同。
然后利用四象限变流器进行动态补偿,在完成静态补偿之后,将要进行合环的两条线路所存在的30°相位差已基本得到了消除。但是由于线路负载和参数等因素的影响,两条线路的电压仍存在差异,合环过程中将仍可能带来较严重的环流问题。利用四象限变流器[16-19],进一步消除两条线路的电压差。即通过灵活控制四象限变流器输出的电压的幅值和相位,动态调节线路电压。
最后设计合环控制模块,利用电压传感器采集补偿后的两进线端之间的电压差,根据电压差值,寻找最佳合环时间,控制合环开关,使合环操作对系统的影响降至最低,实现在线智能合环。同时,设计保护机制,采集合环点的电流,若电流大于安全阈值,立即断开合环,重新寻找合适的合环时间,完成对合环环流的抑制,同时保证电网系统的稳定性不受影响,实现不停电倒负荷。
2 静态补偿环节设计
2.1 静态补偿原理
在三相电网中共有三个电压相量可以使用,因此可以更改变压器不同相的绕组变比,利用电压矢量三角形关系产生出需要补偿的电压矢量,如图3 所示。因此,静态补偿所使用的变压器兼具了变压和调相两个功能。
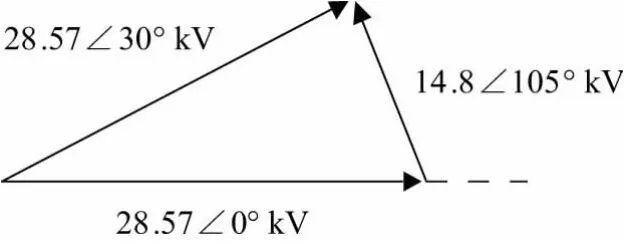
图3 静态补偿环节需补偿的电压矢量Fig.3 Voltage vector to be compensated in static compensation
根据余弦定理,所述串联变压器的输出电压大小与两进线端的电压之间的关系如下:
式中Ua为串联变压器的输出电压的幅值;U1、U2分别为两进线端的电压幅值,二者大小相等,相位差为α。
移相变压器通过二次侧三相绕组电压的组合实现,需要在110 kV/35 kV 进线端线路上串联一个移相变压器以实现相位补偿。对于A 相而言,其等效结构图如图4 所示。
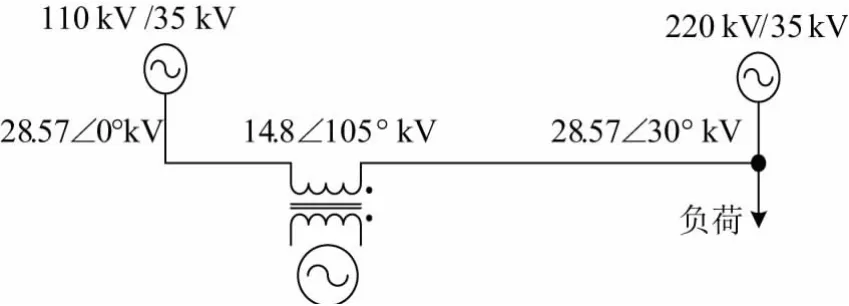
图4 串联移相变压器示意图Fig.4 Schematic diagram of series phase-shifting transformer
2.2 移相变压器变比计算
串联变压器的原边侧与110 kV/35 kV 侧相连,副边侧则需设计6 个抽头以实现所需电压合成。则副边侧电压可以表示为:
式中a、b和c为串联变压器的原边三相相电压;a'、b'和c'为串联变压器的副边三相相电压;x1为串联变压器副边A 相绕组与原边A 相绕组的匝数比;y1为串联变压器副边A 相绕组与原边B 相绕组的匝数比;x2为串联变压器副边B 相绕组与原边B 相绕组的匝数比;y2为串联变压器副边B 相绕组与原边C 相绕组的匝数比;x3为串联变压器副边C 相绕组与原边C 相绕组的匝数比;y3为串联变压器副边C 相绕组与原边A相绕组的匝数比。
串联变压器的电压矢量合成图如图5 所示,根据矢量合成的规则,可求解出式(3) 中的对应参数x1、x2、x3、y1、y2、y3。由矢量计算和三角形的边角关系,已知一边为14.8 kV,内角为105°和60°,从而可以求得b侧b'为16.5 kV,a侧a'为4.4 kV。通过矢量三角形法则及正弦定理可以得到理想状态下的x和y的值,即x1=x2=x3=0.154,y1=y2=y3=0.577。

图5 串联移相变压器电压矢量合成图Fig.5 Voltage vector synthesis diagram of series phase-shifting transformer
传输线的A 相线路电压幅值28.57 kV,而串联变压器所补偿的电压幅值为14.8 kV,而两者流过的电流相同,由此可知串联变压器的容量约为线路设计容量的14.8/28.57 =51.8%。由此可知,相比于全功率移相变压器,文中提出的方案中使用的串联变压器的容量仅为其51.8%,显著节约了成本,降低了工程造价。
3 动态补偿环节设计
3.1 动态补偿原理
在电力系统实际运行过程中,由于谐波污染、输电线路损耗等原因造成的电压相位、幅值偏移等,降低了系统合环的安全性与可能性。动态补偿环节的设计则是基于电能质量优化装置的拓扑结构思想建立的,同时依据文中提出的合环环流抑制机理,设计相应的控制策略对可控电力电子器件进行实时化控制,以实现电压的实时在线补偿。
结合电力电子变流器动态特性好、运行模式灵活的特点,在移相变压器的基础上再设计一个背靠背式的可控电压源环节,对电压相位和幅值进行动态补偿,以寻找最佳合环点进行合环操作,提高系统安全性与可靠性。其原理示意图如图6 所示。其中变压器1 为设计的串联变压器,变压器2 的原边侧与背靠背变流器相接。
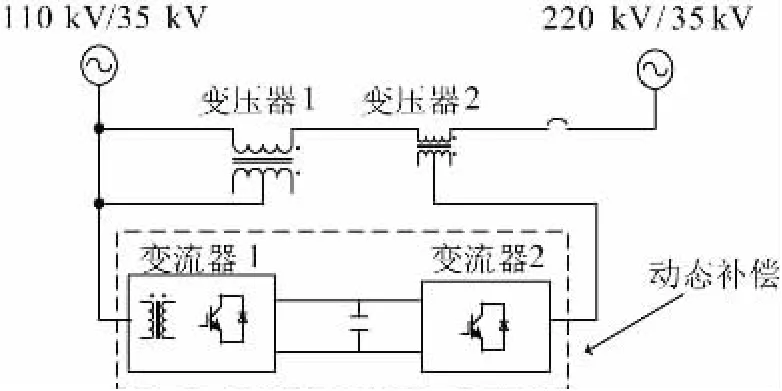
图6 动态补偿环节系统原理示意图Fig.6 Schematic diagram of the system principle of dynamic compensation
通过控制变流器可以为变压器2 提供适当的原边电压,以完成电压百分之一偏移的动态调节,其动态调节过程的电压矢量图如图7 动态调节电压矢量图所示。

图7 动态调节电压矢量图Fig.7 Voltage vector diagram of dynamic compensation
在原有串联变压器进行相位补偿的基础上,加入此动态调节装置后,可对电压的幅值和相角进行动态调节,其可调节范围为以0.35 kV 为半径的圆,提高了系统调节的动态性能。
3.2 四象限变流器的数学模型及控制策略
背靠背四象限变流器包含PWM 整流器以及PWM逆变器两部分,要先建立数学模型,然后根据数学模型的推导与分析才能建立合适的控制方法。
3.2.1 PWM 整流器
PWM 整流器的电路原理如图8 所示。其中L 为交流侧的滤波电感,R 为交流侧的等效损耗电阻,C 为直流侧的电容,I为直流母线所接的负载电流,可用来模拟负载功率的变化。

图8 PWM 整流器原理图Fig.8 Schematic diagram of PWM rectifier
其在静止坐标系( abc 坐标系) 下的数学模型如下:
式中ia为A 相交流侧电流;ua为A 相电网电压;I为直流负载电流;R为电感和功率管串联电阻;Si(i= a,b,c) 为PWM 整流器的开关信号函数,其表达式如下:
在式(4) 中,由于开关函数的存在,使得方程组为一个对时间不连续的微分方程。考虑到开关频率相对于正弦波频率足够高,因此可以近似用开关函数在一个周期内的平均值来代替开关函数。开关函数的取值为0 或1,则开关函数的平均值就是它的占空比。此时方程(5) 中的各开关函数Si(i= a,b,c) 分别表示了三相开关函数的平均值。
由于三相电压信号均为正弦信号,不便进行功率计算和分析,因此将abc 坐标系下的数学模型进行变换,得到与电网频率同步旋转的dq坐标系下数学模型:
式中id、iq分别为dq坐标系下滤波电感三相电流的d轴和q轴分量;Usd、Usq分别为dq坐标系下系统三相电压的d轴和q轴分量;Sd、Sq分别为dq坐标系下三相开关函数的d轴和q轴分量;Udc为直流侧电容电压;ω 为系统角频率。
图9 为PWM 整流器的控制框图,根据采集到的电网线电压信号Uab和Ubc,锁相环模块可以计算得出电网电压的幅值和相位,输出Ud和Uq即为电网电压在d轴和q轴的分量。由于采用了电网电压矢量定向,所以当锁相环稳定后,电网电压在q轴的分量应该为0,而电网电压在d轴的分量则为相电压的幅值,θ 为锁相环模块得出的电压相位。

图9 PWM 整流器控制框图Fig.9 Control block diagram of PWM rectifier
电压环模块根据直流侧电容电压Udc、直流母线负载电流I和经过锁相环得出的Ud计算出三相电感电流在dq坐标系下的指令值。同时使用PID 控制使直流侧电容电压Udc与给定值相同。负载电流I和电网电压d轴分量Ud用来计算电流指令的前馈项,提高系统动态性能和稳定性。电压环模块输出的分别为d轴与q轴的电流参考值。
电流环模块的作用是使用PID 控制使电感三相电流与指令值相同。该模块的输入信号有电感电流(ia和ib) ,电流参考值(Id* 和Iq* ) ,电网电压的d轴和q轴分量(Ud和Uq) ,电压相位信号θ,以及直流侧侧电容电压Udc。电流环模块的输出Q1~Q6为整流器六个IGBT 的开关控制信号。
3.2.2 PWM 逆变器
PWM 逆变器的电路原理如图10 所示,PWM 逆变器主要由三相电压源变换器和直流侧电容C 构成。它通过控制导通或关断6 个IGBT 开关器件,输入端为Udc,在输出端产生的三相电压Ua、Ub、Uc。

图10 PWM 逆变器原理图Fig.10 Schematic diagram of PWM inverter
图11为PWM 逆变器的控制框图,PWM 逆变器控制模块实现的功能是输出六个脉冲信号K1~K6,使得整流桥的六个IGBT 按序进行开通和关断。
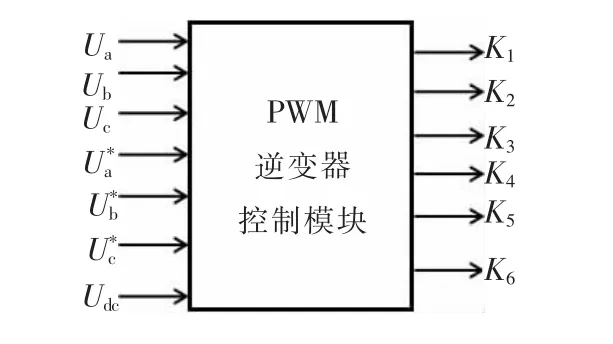
图11 PWM 逆变器控制框图Fig.11 PWM inverter control block diagram
模块的输入为三相电压及参考电压、整流部分的电压Udc,使用简化的SVPWM 算法计算占空比,输出六个脉冲信号,控制六个IGBT 开通和关断。
4 仿真结果与分析计
采用PSIM 软件进行仿真验证。
图12 为静态补偿环节仿真框图,其中串联变压器用多个单相变压器代替,在实际工程中应考虑将所有变压器集成到一台设备中,以提高材料的利用率并降低系统体积和成本。
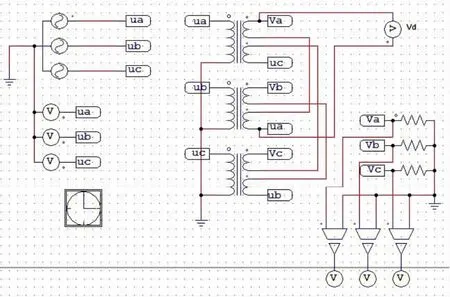
图12 静态补偿环节仿真图Fig.12 Simulation diagram of static compensation
静态补偿环节仿真结果如图13 所示,其中Ua为静态补偿前电网A 相电压,Va为静态补偿后电压,可以看出经过静态补偿后,电压幅值不变,相位右移30°,其余两相情况相同。成功验证了所设计的静态补偿环节具有可行性。
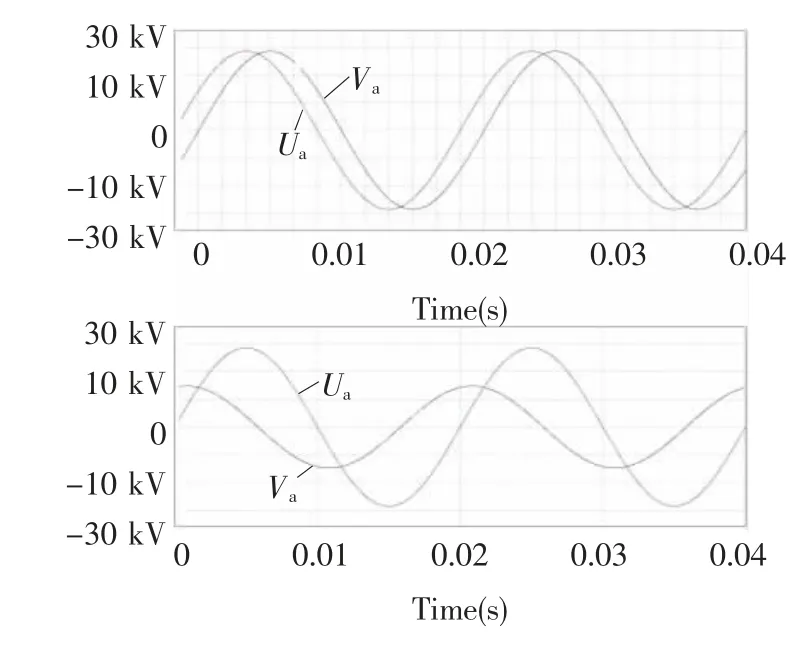
图13 静态补偿环节仿真结果Fig.13 Simulation results of static compensation
同时,移相变压器通过的电压Vd约为线路电压的一半,由于流过两者的电流相同,由此可知串联变压器的容量约为线路设计容量一半,而传统的全功率移相变压器通过的功率与线路设计容量相同,因此所设计的串联变压器可使通过的功率减半,可以有效降低成本。
动态补偿环节采用背靠背变流器的设计,包含PWM 整流器以及PWM 逆变器,仿真框图如图14 和图15 所示,三相输入电压为380V,控制系统采集了交流电网线电压、两相电感电流和直流母线电压信号。交流侧电感的可以将PWM 整流器交流侧的电压与电网电压之差转变为电流,并有平滑电网电流的作用。直流侧电容在PWM 整流器系统中起着维持直流母线电压的作用。
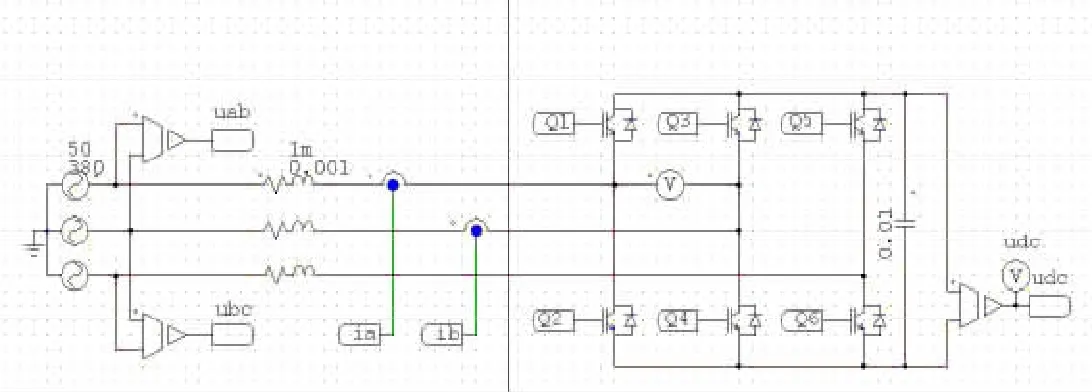
图14 动态补偿环节整流部分仿真图Fig.14 Simulation diagram of the rectification part of dynamic compensation

图15 动态补偿环节逆变部分仿真图Fig.15 Simulation diagram of the inverter part of the dynamic compensation
动态补偿环节仿真结果如图16 所示,上图Udc为直流侧电压,下图为逆变器输出三相交流电压波形。
经过短暂的动态环节后,整流部分与逆变部分均实现稳定输出,逆变部分输出电压能够快速实时地跟随给定电压波形,可以按照设计要求的实时动态改变电压幅值和相角,以达到最佳合环点进行合环操作。
将静态补偿环节和动态补偿环节按照图2 的系统设计图进行连接,并设计合环策略控制器,首先延时0.02 s 以保证静态补偿环节和动态补偿环节的输出达到稳定状态,然后利用电压传感器采集补偿后的两进线端之间的电压差,计算一段时间内的电压差平均值,当平均值与最大值都小于设计阈值时,即满足合环条件,输出命令时断路器闭合,实现在线智能合环。同时,设计保护机制,采集合环点的电流,若电流大于安全阈值,立即断开合环,重新寻找合适的合环时间。
合环环流抑制系统仿真结果如图17 所示,为方便仿真实验母线电压设为380 V,上图为合环开关状态,下图Ic为系统环流,可以看出在0.04 s 时系统完成合环操作,合环后环流接近为零,所设计的合环环流在线抑制方案有效的抑制了合环环流。

图17 环流抑制系统仿真结果Fig.17 Simulation results of circulation suppression system
5 结束语
针对配电网存在30°相位差的合环问题,文章设计了静态补偿环节和动态补偿环节消除30°相位差。所设计的基于相位补偿的配电网30°合环环流在线抑制技术能够有效地抑制30°相位差情况下的合环环流,寻找最佳合环点合环,并提高电网运行的可靠性与安全性,解决了存在30°相位差的配电站不能直接合环倒负荷的问题,避免了现有系统中存在的停电、派遣人员现场操作、用户供电无法得到有效保障等一系列经济和社会的问题。同时,所设计的移相变压器的容量约为线路设计容量一半,相比传统的全功率移相变压器可以有效降低成本。
提出的基于相位补偿的配电网30°合环环流抑制方法具有成本低、效率高、实时性好等优点,有效解决了因倒负荷而造成的停电问题,减小了合环操作对电网的冲击,进一步提高电网供电的可靠性,保证电网的稳定运行,提高系统的安全性能。同时也存在一定的不足,目前完成了理论研究与仿真验证,研究成果有待进一步推广应用;研究内容仅针对存在30°相位差的合环情况,具有一定的局限性,未来可以通过设计多抽头的移相变压器,利用可控晶闸管进行切换,从而合成出任意相位的输出电压,实现任意相位差的补偿。
