基于RGV 的环形横移式循环电梯起重机创新设计
2023-12-22杨铁
杨 铁
(毕节市特种设备检验所,贵州 毕节 551700)
0 引言
近年来,随着工业化进程的不断推进,起重机在各个领域的应用越来越广泛。环形横移式循环电梯起重机作为一种新型起重机,具有结构紧凑、运行稳定、效率高等优点,受到了广泛关注和研究。A.Gupta,S.K.Saha 和A.Kumar(2012)提出了一种基于RGV 的环形横移式循环电梯起重机控制系统设计方法。该方法涉及运动控制和安全控制等方面的研究,旨在提高起重机的运行效率和安全性能。王辉等(2018)[1]提出了一种基于RGV 的环形横移式循环电梯起重机设计方案。该方案采用了环形横移式循环电梯起重机的结构,同时引入了RGV 技术,实现了起重机的横向移动。通过仿真分析和实验验证,研究人员证明了该方案的可行性和效果。在该方案中,RGV 技术被用于实现起重机的横向移动,从而可以在不改变起重机结构的情况下,提高起重机的工作效率和精度。该方案还采用了模块化设计,方便了起重机的维护和升级。本文以此为基础,通过将RGV 的横向移动和电梯的垂直升降功能相结合的方式,在狭小空间内实现起重机的高效操作。
1 环形横移式循环电梯起重机的设计思路
1.1 将横移轿厢进入环形横移通道的过程与换向过程组合的设计方案
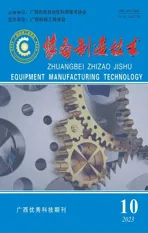
如图1,在垂直循环井道与环形横移通道的连接处设置轿厢缓冲区,确保横移轿厢在进入通道前完成换向操作,并在缓冲区内等待进行横移动作[2]。这样的设计方案有以下几个关键考虑因素。
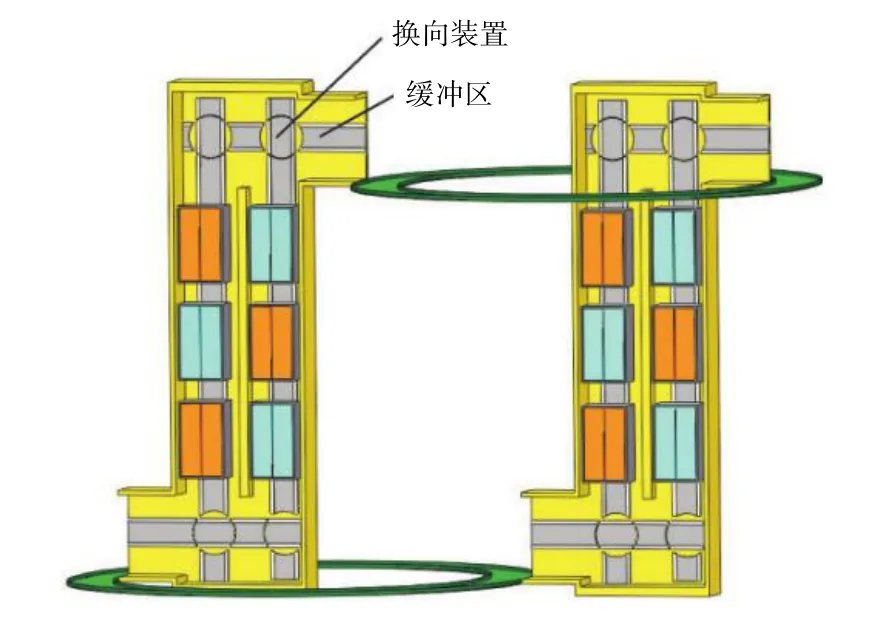
图1 将横移轿厢进入环形横移通道的过程与换向过程组合
首先,缓冲区的长度和宽度需要根据横移轿厢的尺寸和运行需求进行合理设计。缓冲区长度应能容纳横移轿厢换向所需的距离,并留出足够的空间供轿厢停留等待横移操作。缓冲区的宽度应与轿厢宽度相匹配,以确保轿厢能够顺利进入和停留在缓冲区内。其次,在缓冲区设计中,需要考虑控制系统的设计。控制系统应能够准确控制横移轿厢在缓冲区内的位置和停留时间。
1.2 利用转运轿厢运载横移轿厢来实现电梯起重机的环形运行
为了实现转运轿厢在环形横移通道上的快速运行,需要在通道上铺设轨道,并采用轮轨驱动技术。这种技术通过驱动装置在轨道上运行的方式来推动转运轿厢的运动[3]。驱动装置位于转运轿厢底部,采用单侧驱动方式。如图2 所示。

图2 转运轿厢运载横移轿厢实现电梯起重机环形运行
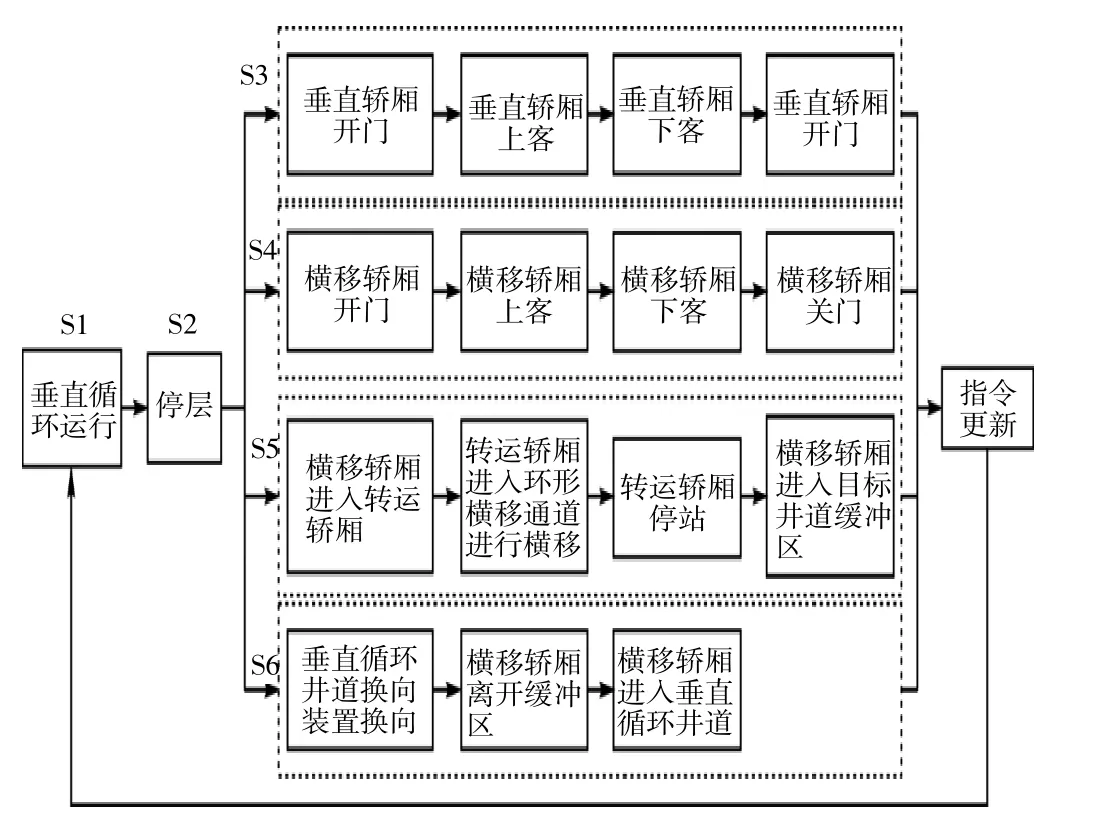
图3 基于RGV 的环形横移式循环电梯的调度策略
2 基于RGV 的环形横移式循环电梯起重机的设计方法
2.1 基于直线电机的电梯起重机驱动设计
选择适合的直线电机作为电梯起重机的驱动装置。直线电机的选择应考虑其功率、转速、扭矩等参数,以满足电梯起重机的运行需求。设计合适的电力系统,包括电源供应、电缆布置、电流保护等。
位置控制计算式:
式中,x(t)表示时间t时刻的位置;x0表示初始位置,v(t)表示时间t时刻的速度。
速度调节计算式(2):
式中,v(t)表示时间t时刻的速度;k表示速度调节系数;i(t)表示时间t时刻的直线电机电流。
采用先进的控制算法和传感器技术,提高位置控制的精度和速度调节的灵活性。位置控制和速度调节是通过控制直线电机的电流大小和方向来实现的。
2.2 无绳提升安全保护设计
设计合适的无绳提升机构,包括电机、减速器、传动装置等。无绳提升机构的设计应考虑其结构强度、可靠性、安全性等因素,确保电梯起重机的稳定和安全运行。
速度保护系统:
式中,vmax为电梯起重机的最大运行速度,amax为电梯起重机的最大加速度,h为电梯起重机的最大运行高度。
位移保护系统:
式中,dmax为电梯起重机的最大位移距离,amax为电梯起重机的最大加速度,tmax为电梯起重机的最大加速时间。
防坠保护系统:
式中,hmin为电梯起重机的最小垂直高度,g为重力加速度,tmin为电梯起重机的最小防坠时间。
2.3 多轿厢换向设计
(1)初始化:将所有轿厢的初始状态设置为停止状态,并记录它们的当前位置和目标楼层。(2)轿厢选择:根据当前的调度策略,选择一个轿厢进行运行。常见的策略包括最短等待时间优先、最小运行时间优先等。(3)目标楼层选择:根据当前的调度策略,为选中的轿厢选择一个目标楼层。常见的策略包括最近目标楼层优先、最远目标楼层优先等。(4)运行控制:根据选中的轿厢和目标楼层,计算出轿厢的运行方向和运行速度。同时,与其他轿厢进行通信,协调运行顺序和换向时机,以避免碰撞和干扰。(5)运行更新:更新选中的轿厢的位置和状态,并记录当前运行的楼层和目标楼层。(6)循环迭代:重复执行步骤(2)到步骤(5),直到所有的轿厢都到达其目标楼层并停止运行。
2.4 基于RGV 的环形驱动设计
基于RGV 设计的转运轿厢驱动装置采用直行穿梭车的工作方式,驱动装置是该装置的核心组成部分。其外侧的电机直接驱动驱动轮,通过转动驱动轮来实现转运轿厢的运动。而从动轮则没有直接的驱动功能,只起到从动作用,随着驱动轮的转动而被带动。牵引支座连接着驱动装置和转运轿厢,将驱动力从驱动装置传递到转运轿厢上。通过牵引支座的作用,驱动装置所产生的动力能够有效地传递到轿厢,推动轿厢沿着环形轨道运动。
3 基于RGV 的环形横移式循环电梯起重机的实验验证
3.1 基于RGV 的度电梯整体结构
该电梯采用了一种创新设计,将一个井道中设置了多个可垂直循环运行的垂直载客轿厢和转运轿厢。垂直载客轿厢负责垂直方向上的乘客运输,其具有较高的载客量和运行效率,可以满足大量乘客的需求;而转运轿厢则专门用于承载RGV 轿厢,其结构坚固,能够快速、稳定地运输RGV 轿厢,确保其安全地到达目的地。垂直载客轿厢和转运轿厢之间的运行是互不干扰的,可以同时进行,这极大地提高了电梯的运行效率和乘客的体验。同时,该电梯还配备了一系列安全保护措施,如电梯轿厢的超载保护、运行速度的限制、紧急制动装置等,确保乘客和设备的安全。
3.2 验证结果
S1:垂直循环运行动作是指环形横移式循环电梯起重机的垂直轿厢进行上下运行的动作。垂直轿厢根据接收到的垂直呼梯指令,通过电梯系统控制,进行垂直运行操作。这个动作的实施是为了满足乘客的垂直运输需求。通过垂直循环运行,乘客可以方便地到达所需的楼层。
S2:停层动作是指垂直轿厢在到达目标层后进行停止的动作。一旦垂直轿厢到达乘客所选的目标层,它会自动停下来,以便乘客进出轿厢。这个动作的实施是为了确保乘客能够在目标楼层安全地下车。
S3:乘客进入垂直轿厢后,垂直轿厢会进行关门动作,并清除已完成的垂直呼梯指令。关门动作确保乘客的安全,并且一旦关门,垂直轿厢就会准备好进行下一个呼梯任务。这个动作的实施是为了提供乘客进出轿厢的便利和安全。
S4:乘客进入横移轿厢后,横移轿厢会进行关门动作,并且乘客可以通过轿厢内的选层按钮选择另一个井道内的目标层。一旦乘客按下选层按钮,横移轿厢会清除已完成的横移呼梯指令。这个动作的实施是为了让乘客能够选择他们想要到达的目标楼层,并更新横移指令。
S5:横移轿厢到达当前井道缓冲区后进行停层动作,并等待缓冲区与转运轿厢对接。一旦对接完成,横移轿厢会清除已完成的环形横移指令。这个动作的实施是为了确保横移轿厢能够平稳地与转运轿厢对接,以进行货物的转运。
S6:横移轿厢到达目标井道缓冲区后进行停层动作,并等待垂直循环井道换向装置的换向。一旦换向完成,指令会进行更新,即横移轿厢的横移指令会转换为当前井道的垂直停层指令。这个动作的实施是为了确保横移轿厢能够顺利进入目标井道,并根据换向装置的操作进行相应的指令更新。
横移轿厢在进行横移动作之前需要满足特定的条件,而在横移过程中会根据乘客的指令进行停层操作。本文设计的调度策略能够给乘客提供顺畅的运输体验,并确保横移轿厢在转运过程中能够高效地满足乘客的需求。
4 结语
针对传统起重机在狭小空间内操作不便、效率低下等,提出了一种基于RGV 的环形横移式循环电梯起重机创新设计。该设计方案不仅能够提高起重机的操作效率和灵活性,减少人力成本和占地面积,还能够满足狭小空间内的起重需求。