基于红外热电堆传感器的人感控制器设计
2023-12-22李志逢邹宏亮
李志逢 邹宏亮
(珠海格力电器股份有限公司 珠海 519000)
引言
随着科技的发展,人们的生活水平不断提高,随之而来的,人们对空调的智能化和使用舒适性要求越来越高[1]。在日常生活中,用户移动了位置、人数量变化时扫风板角度已不再适合当前用户的位置。只能手动调节扫风板角度来解决,隐形中给用户增加了使用负担。亟需有一种可实时检测人体位置并可与空调扫风板联动的控制器来解决此问题。本文以32位单片机TM4C123GH6PM为控制和数据处理器,通过红外热电堆传感器MLX90640检测空间热源情况后采用热源图像处理算法识别人体位置来控制空调扫风角度,真正实现空调的智能化控制,并可在一定程度上提升用户舒适性和产品竞争力。
1 红外热电堆阵列传感器
红外热电堆传感器是一种利用红外线辐射能量来检测物体温度的传感器,它由多个热电偶串联起来,它和热电偶的原理都是基于物质温差产生电动势的效应(塞贝克效应)[2];每个热电偶都由两种不同材料组成,其中一种材料是红外线吸收材料,另一种材料是金属导体,当红外线射到红外线吸收材料上时,它会被吸收并转化成热能,导致该材料的温度升高,这个温度差会导致热电偶产生电势差,从而产生电流,通过测量电流大小就可以测量物体的温度。结构上由可透过特定波长范围的红外滤光片和红外接收的热电堆芯片组成。
1.1 MLX90460红外热电堆阵列传感器
MLX90460传感器是由迈来芯公司生产的一种完全校准的高分辨率红外测温阵列芯片,其内部集成32×24个红外测温单元,可精确检测特定区域和温度范围内的目标物体[3][4];集成了一个环境传感器来测量芯片的环境温度和供应传感器来测量VDD,支持数字I2C总线接口读取存储在内部RAM的温度数据和电压数据;而且体积小使用4针工业级TO39封装,便于开发设计产品,具体电器参数如表 1。
2 控制器硬件设计
人感控制器的应用对象是天井机,安装位置在天井机的扫风面板的一个角上,主要由传动控制模块和检测模块组成,红外热电堆传感器集成在检测模板板上;而传动模块的作用是将检测模块及传感器带动到四个方向,实现360 °旋转检测,系统结构图如图1。
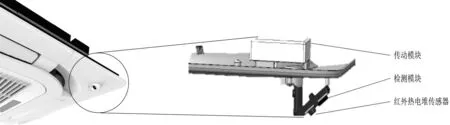
图1 系统结构图
检测模块是红外热电堆传感器的载体,由于传感器的检测视角范围是75 °,因此检测模块和垂直方向的夹角也为75 °,保证能够检测到传感器正下方的热源情况;控制器硬件方面主要讲解传动控制模块。
2.1 传动控制模块硬件设计
传动控制模块由主芯片、步进电机、I2C通讯接口和HBS通讯接口组成。主芯片采用TI公司推出的32位基于ARM Cortex-M4内核的TM4C123GH6PM,该芯片拥有主频80 MHz,256 KB Flash,32 KB SRAM,这些资源对于传感器的多组检测数据存储和高速运算提供了有力保障;同时还拥有通用异步收发传输器器(universal asynchronous receiver /transmitter,UART)、同步串行接口(synchronous serial interface,SSI)/串行外设接口(serial peripheral interface,SPI) 、内部整合电路(inter-integrated circuit,I2C)等通用接口,可根据通讯对象灵活快速配置,方便和空调机组(UART)、红外热电堆传感器(I2C)实现通讯。控制器的系统框图如图2所示。
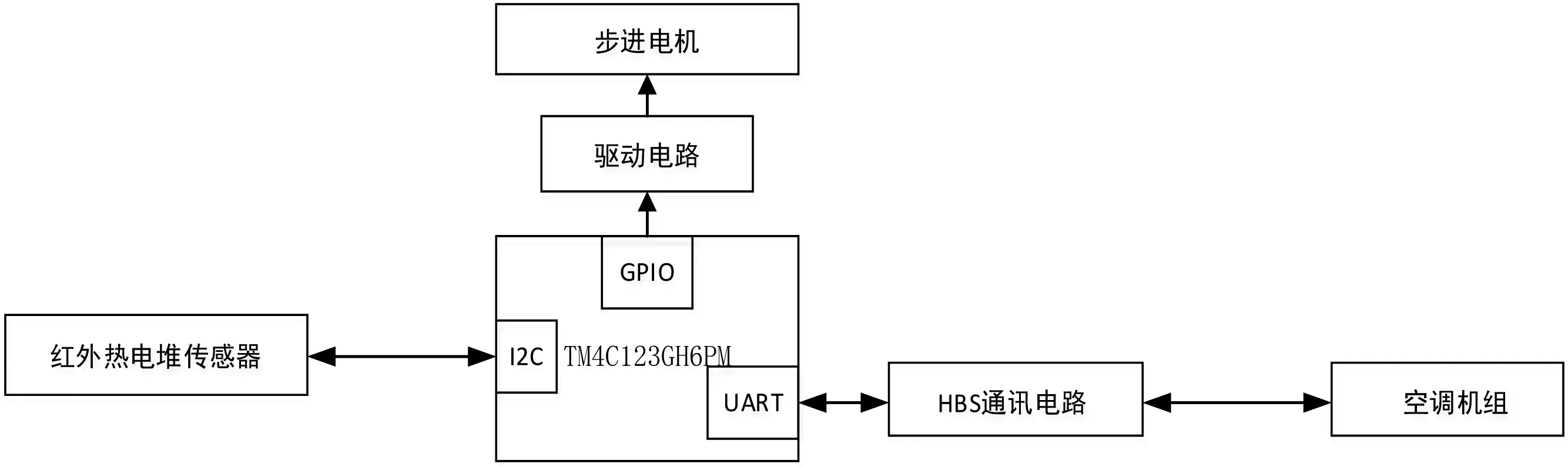
图2 系统框图
2.1.1 步进电机驱动电路
步进电机选用四相步进电机MP24AH,该电机步距角为5.625 °/64步,可满足传感器检测模块的360 °范围内任意角度的转动需求,驱动方式采用四相八拍,控制方式相对简单且可保证力矩平稳和控制精度,减少失步风险。驱动芯片选用ULN2003,内部采用NPN型达林顿阵列驱动电路,单通道电流可达500 mA,且输出端集成钳位二极管,有效保护步进电机可靠工作,步进电机驱动电路如图3所示。
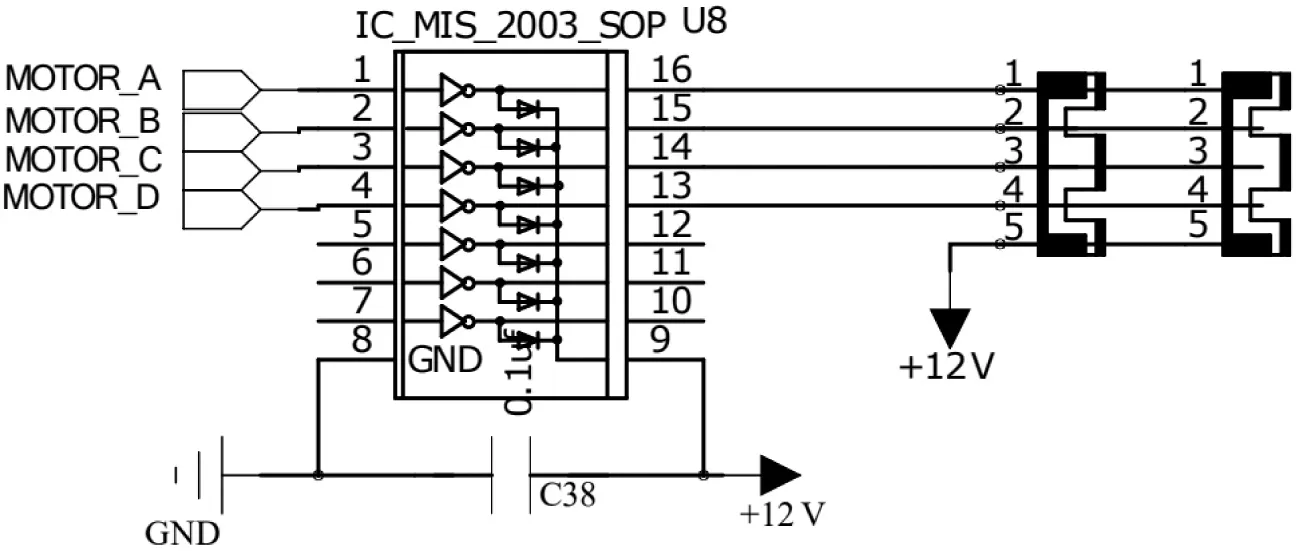
图3 步进电机驱动电路
2.1.2 HBS通讯电路
HBS(家庭总线系统,Home Bus System)是一种以低压电力载波方式将差分信号加载到两根通讯线上的通讯总线方式[5],因其通讯距离长、抗干扰能力强,安全性高,对极性无要求等特点,在空调领域特别时中央空调产品中具有最广泛的应用。选用Maxim公司的MAX22288收发器,内部集成有源电感和LDO模块,可减少外围电路的差模电感和电源转换电路,便于控制器PCB小型化设计。并且具有可调整接收器阈值和驱动转换速率,支持传输速率高达200 kbps,为芯片在复杂环境中可靠工作提供了有力保障,HBS通讯电路见图4所示。
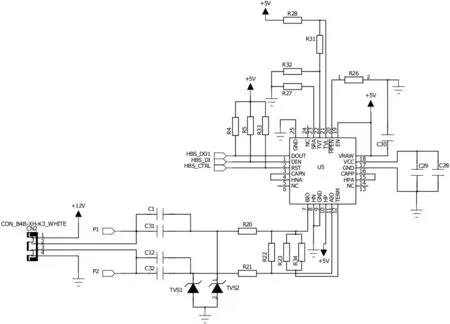
图4 HBS通讯电路

表1 MLX90460传感器电气参数
2.2 传动控制模块软件设计
软件设计部分采用时间片架构模块化设计;控制器上电后首先初始化MCU时钟,最小系统启动后,配置UART、GPIO和I2C等外设寄存器,并对使用的全局变量初始化;下发对红外热电堆传感器初始化I2C指令,同时控制步进电机进行复位动作,当传感器准备好且步进电机已完成复位后,按照时基任务进行调度任务;本文控制器作为HBS通讯的上位机,使用波特率为57 600 bps,发送数据周期为2 ms;步进电机驱动频率为6 ms;步进电机每转动90 °采集一次热源信息,通过对采集到的热源信号进行小信号数字滤波处理、四邻域算法和背景差值算法并结合人体温度阈值特征可识别到有效热源信息;之后再依据扫风叶片角度和传感器检测范围的地面投影位置映射关系,通过查表法可得出当前热源需要的扫风板角度;人感控制器最后将扫风板需要动作到的角度发给空调机组,就完成了空调机组根据人体位置智能扫风的功能,软件控制流程见图5所示。
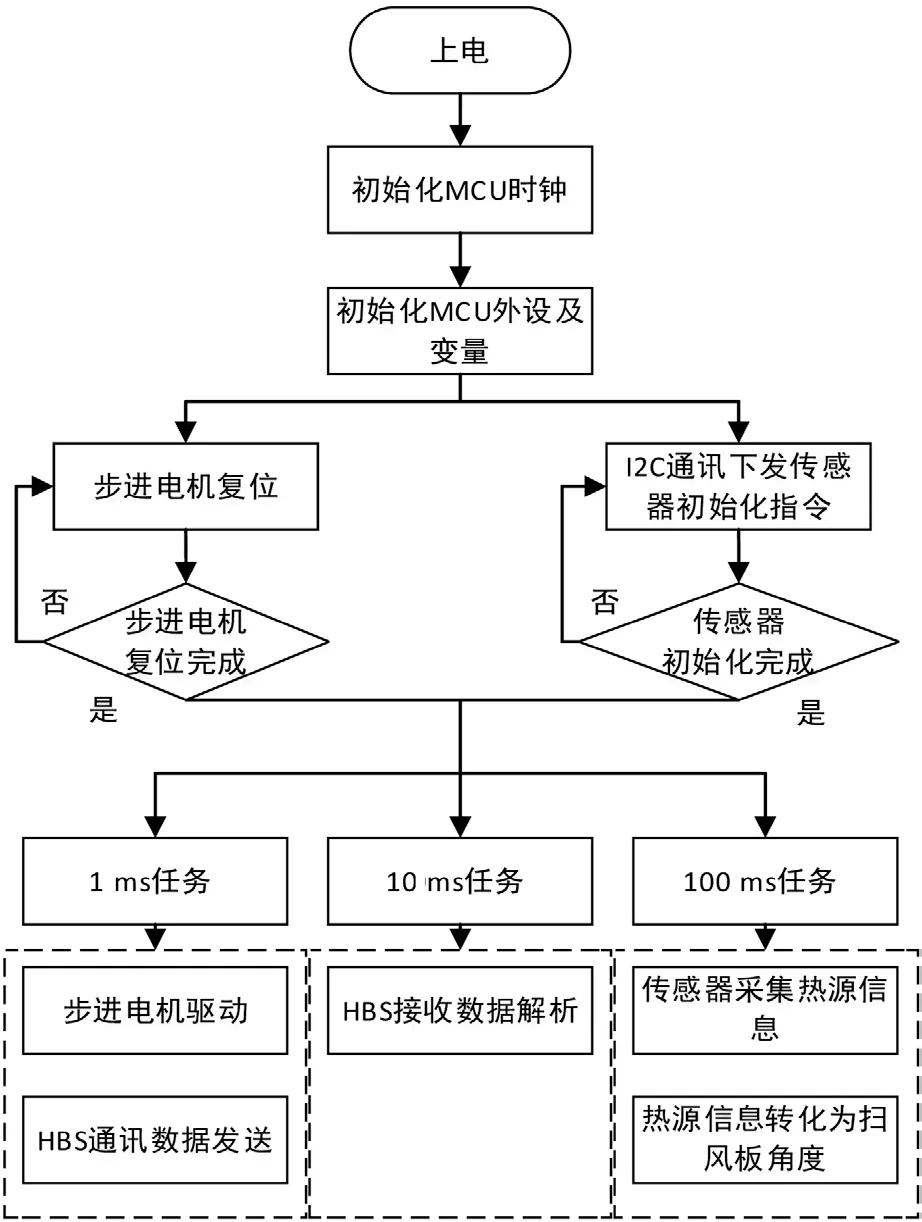
图5 软件控制流程图
3 方案实现
通过以上方案设计,在实验室(16~30)℃温度范围情况下,识别到以机组为圆心,半径3 m内的人体识别率为98 %。控制环境温度在(18~28)℃范围内,人体分别坐在距离机组(0.4~4.5)m距离测试,当人体感受到有0.2 m/s的风速认为扫风板动作合理,最终结果表2显示只有在距离机组特别近时会有感受不佳的情况,但是总体上已满足了在较宽温度范围内,房间满足空调制冷量的情况下,可实现空调智能送风的功能。
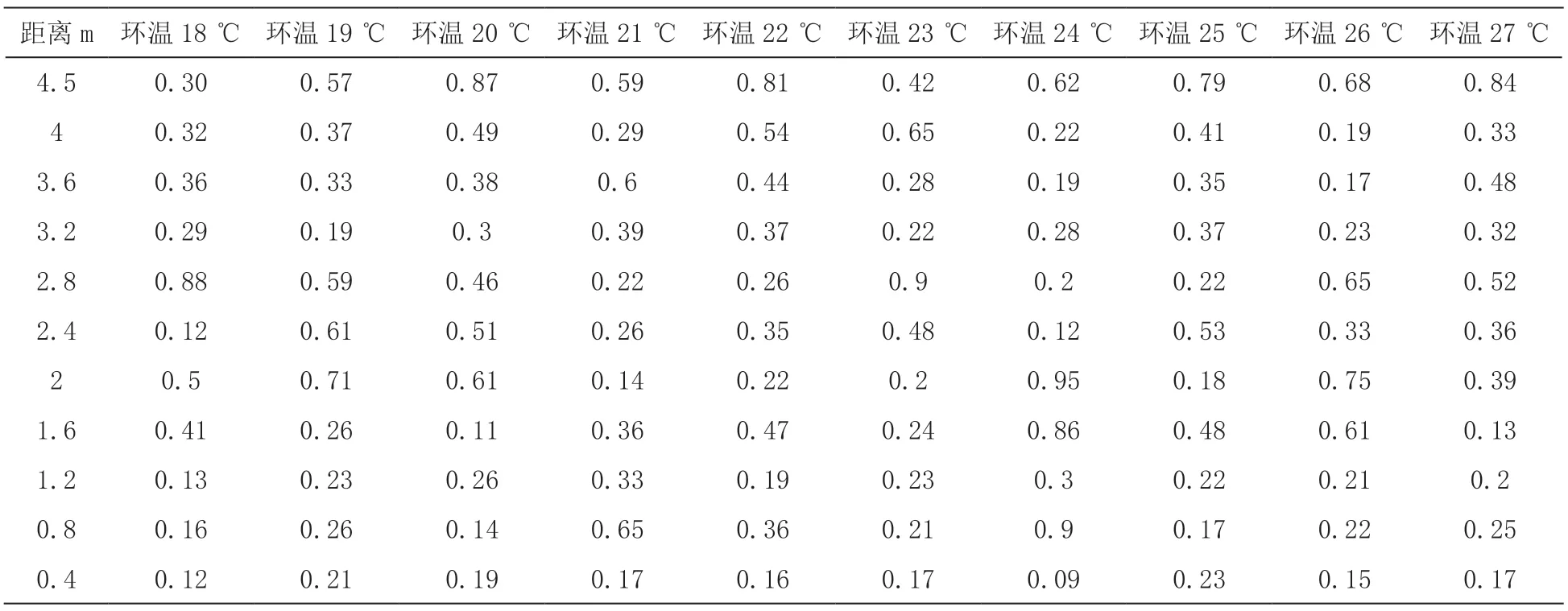
表2 人感风量检测数据
4 结束语
本文采用MLX90460传感器识别人体热源信息,通过人感控制器带动传感器360 °检测并能够联动空调机组,实现天井机组智能扫风,验证了方案的可行性。但是在验证过程发现其他热源的干扰、人体根据环境发射红外不确定性,穿衣薄厚的影响等都会影响人体检测的准确性。空调机组送风风场的流动性等会影响用户的直接感受;以上的问题是后续方案产品化需要研究的方向。
