无人机倾斜摄影测量在广州白云区某镇大比例尺测图中的应用实践
2023-12-22阮水聪
阮水聪
(广州市城市规划勘测设计研究院,广东 广州 510060)
1 引言
传统大比例尺测图多采用外业调绘与人工内业成图的方式进行,具有精度高、要素信息精准等优势,但存在测图成本高、效率低等问题,不适于大范围测图工作[1]。近年来无人机倾斜摄影技术的发展使得快速、高效、精准的大范围大比例尺测图成为现实[2]。无人机倾斜摄影测量技术能够实现超低空、多视角作业,获取测区范围内近地、多视角高分辨率遥感数据,不仅能够体现测区真实的地形、地貌情况,还能获取测区目标物更为丰富的纹理信息,进而构建实景三维模型[3]。以构建的实景三维模型为数据基底,可实现测区地物、地形、地貌的提取分析,最终绘制地形图。
本文以广州市白云区某镇为例,结合实地调研、地形分析、规范要求等,从航线布设、控制点选取测量、控制点约束空三加密、实景三维模型构建等流程,探讨无人机倾斜摄影测量技术在大比例尺测图中的应用。基于无人机倾斜摄影测量技术开展地形图测绘,可有效减少外业调绘工作,具有测图效率高、节约项目成本、灵活机动等优势,按照要素提取、属性赋值等测图要求,结合内业人机交互测图,可确保要素完整、精确,在大比例尺测图中具有较高的推广应用价值。
2 无人机倾斜摄影大比例尺测图流程
利用无人机倾斜摄影测量技术获取测区影像数据,主要任务有数据获取处理、三维模型创建、内业数字化成图、外业补测、精度检查、成果提交等,具体作业流程如图1 所示。

图1 具体作业流程
2.1 无人机航摄流程
2.1.1 航线任务规划
无人机航摄前需规划好航线、计算出相对航高、根据测区大小及高差判断是否需要分区、设置好影像的航向和旁向重叠度等。
2.1.2 像控点布设与影像获取
像控点是用有限的地面控制点计算影像模型外方位元素,然后用空中三角测量计算其余地面点坐标。像控点应选在航线重叠区域,以及易判读、不易破坏移动、具有明显特征、方便内业判读区域。每个像控点共采集四组观测数据,根据像控点采集规范要求,四组观测值平面差小于2cm,高程较差小于3cm,将四组观测数据平均值作为像控点最终成果数据。影像获取应选在天气良好的时段,为保证作业时侧视镜头能完整覆盖测区边界,航线布设时,航向、旁向覆盖应至少超出航摄分区边界一个相对航高的距离。
2.2 三维模型建立
三维模型构建需对外业采集的高分多视角影像数据、像控点数据进行联合处理,采用Inpho 等专业软件构建三维模型,三维模型构建流程如图2 所示。

图2 实景三维构建作业流程
三维模型构建的步骤主要有:( 1 )空三加密。基于少量实测野外控制点,对航摄影像进行控制点加密处理,实现多视角影像的定向。( 2 )影像密集点匹配。通过计算机解算生成高密度三维点云信息,对影像数据进行密集匹配。( 3 )三维倾斜模型构建。从影像中抽取特征点形成密集点云组合为海量三角TIN,再经优化构建出目标物白膜,将同时期获取的像片纹理信息映射到相应白膜上,构建实景三维模型,得到符合真实色彩视觉的三维模型[4]。三维模型数据包含3 种信息,分别是真实影像纹理、不规则三角网、高密度点云。
2.3 内业测图
将三维模型数据导入生产平台,对模型进行矢量化,采集地物、地貌等目标信息,并结合影像、真实场景对地物、地貌进行判读,获取目标物属性信息。完成内业数据采集后,对因数据遮挡等导致信息丢失、属性无法判读的,需外业实地调绘,确保数据完整性。
3 项目实践
以广州市白云区某镇为测区,测区地势平坦,建筑物分布集中,且建筑高低有一定差异性,植被分布较少,航飞空域良好,在数据获取方面优势明显。测区最大地形差约为46m,面积约36km2,航摄地面分辨率为5cm,根据任务书要求施测1∶1000 地形图。
3.1 测区数据采集
3.1.1 航空摄影测量仪器设备
采用CW30 垂直起降无人机搭载飞思IXU-RS1000相机获取5cm 分辨率倾斜影像,满足1∶1000 比例尺测图,无人机数据处理采用Inpho、EPS 三维测图系统等设备。航摄平台的主要技术参数如表1 所示。
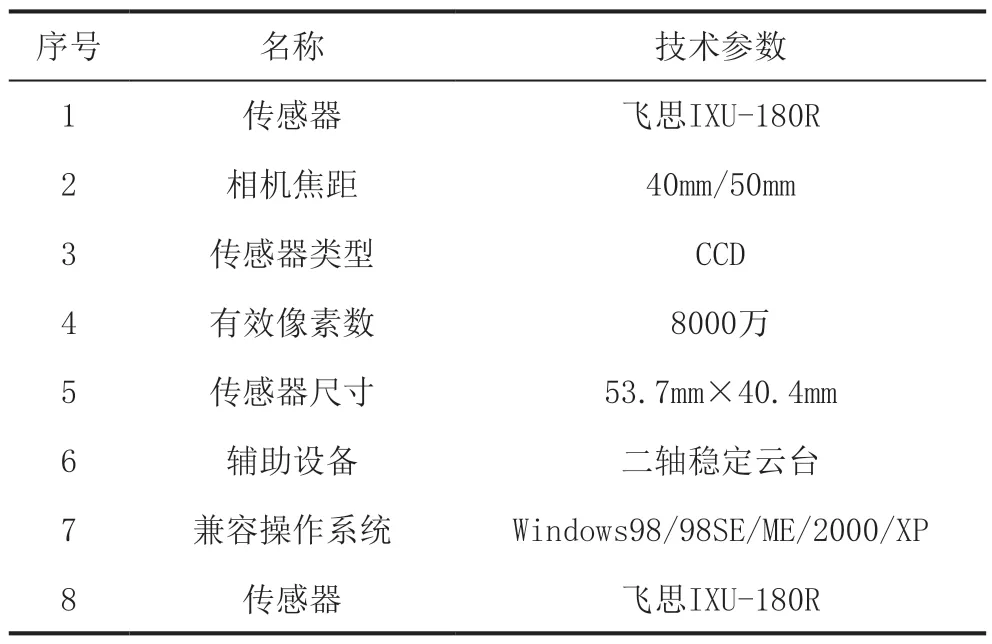
表1 航摄平台技术参数
3.1.2 测区控制点布设
无人机倾斜摄影测量技术在数据获取时,受飞行平台飞行高度、搭载传感器性能等限制,所获取航空影像数据幅宽较小,为满足后期处理需求要确保一定的重叠度,这就导致影像数量较多。为保证后期纠正精度,需根据测区范围、地形地貌,布设地面像控点,作为后期影像纠正的控制资料。利用地面像控点与影像物点的对应关系,计算出相机的外方位元素,联合相机内方位元素,实现倾斜摄影三维模型数据几何校正,完成空中三角测量。
采用GNSS RTK 技术获取像控点精确坐标,像控点布设细节如图3(a)所示。航飞任务开始前需确认仪器正常运行,并记录航线高度、飞行速度、单架次飞行航程等信息,确认完毕后升空作业。本次实验结合测区地形、地物特征,将飞行高度设置为65m,航向重叠设置为75%,旁向重叠设置为70%,地面分辨率为5cm[5],部分影像概略如图3(b)所示。

图3 像控点布设细节及部分概略影像
3.2 实景三维建模
3.2.1 三维模型构建
三维模型构建主要采用瓦片技术,根据数据情况合理分配瓦片数量、大小,最大瓦片纹理不超过100 Mpixels。基于空三加密结果,从影像中抽取特征点形成密集点云,组合为海量三角TIN,再经优化构建出目标物白膜,将同时期获取的像片纹理信息映射到相应白膜上,得到符合真实色彩视觉的三维模型[4],纹理映射成果如图4 所示。
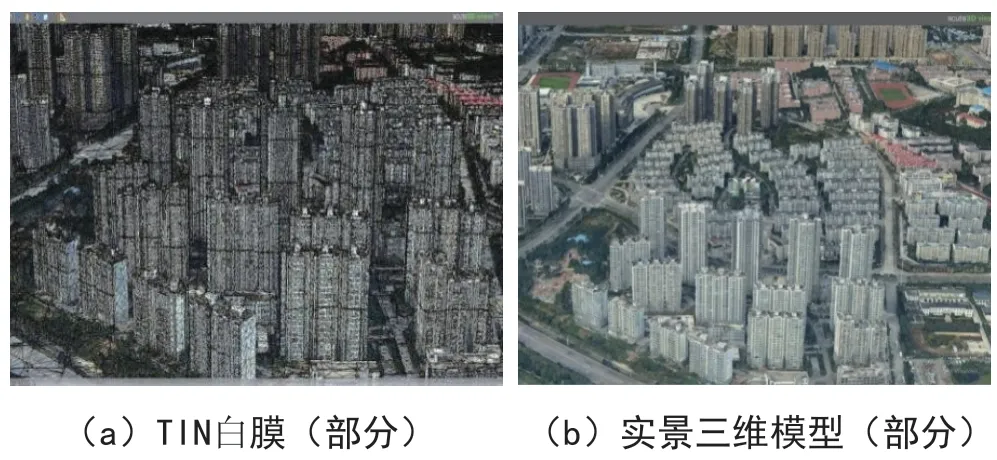
图4 纹理映射成果
3.2.2 三维实景数字化测图
将制成的三维模型导入地形图生产平台,基于倾斜模型数据获取各要素三维特征点、线及相关空间属性信息。采用清华山维EPS 专业测图软件进行数字化采集,该软件可将OSGB 模型数据转换为DSM,加载入三维测图系统,完成参数设置后,经人机交互实现点、线、面等要素的采集、编辑,并按照相关测图规范要求赋予属性信息[4-5]。为保证测图成果的准确性,内业完成数据采集后,对部分无法确定属性信息及受遮挡区域进行外业实测、补测,保证测图成果符合项目需求及相关规范要求。部分线划图成果如图5 所示。

图5 数字线划图(部分)
4 精度分析
基于实景三维模型的数字化成图不仅要保证要素完整、属性信息准确,还要确保测图成果精确。完成数字化信息采集后,对测图成果进行精度分析,保证测图精度满足相关规范要求。首先利用CORS 测量获取图根点,再利用全站仪在图根点上架站,后视定向后采集建筑物角点、道路特征点的平面坐标。为了对测图成果进行精度验证,对此次生产的DLG 数据分批次采集检查点,并与外业实测点位进行对比分析,计算平面中误差与高程误差,精度检查结果如表3 所示。

表3 精度检查(单位:m)
5 结语
本研究通过实地调研、地形分析、相关规范查询等,制定了无人机倾斜摄影大比例尺测图的整体技术流程,并以广州市白云区某镇为测区,采用无人机飞行平台搭载飞思IXU-RS1000 相机,获取测区全域5cm 分辨率倾斜影像,通过内业专业处理软件构建测区实景三维模型,并基于实景三维模型制作数字线划图。 通过外业补测、实地调绘方式验证了测图成果的准确性,实验成果满足国家1∶1000 大比例尺测图要求。与传统人工外业实测方式相比,无人机倾斜摄影测量技术具有高效、便捷的数据获取与内业成果快速、高精度的数字化能力,提高了测图效率、降低了项目成本,为大比例尺测图提供了一种新方法,具有一定的推广应用价值。
