高喷消防车的消防炮控制系统设计
2023-12-21钟婷邓成中
钟婷 邓成中
关键词:喷射角度;消防炮;无线扩频模块LoRa;手持控制器;直流无刷电机;高喷消防车
中图分类号:TU998.13+1 文献标识码:A
0引言
随着我国社会经济的高速发展,高层与大空间的建筑拔地而起,该类建筑人员密集,空间复杂,一旦发生火灾很难进行疏散。为了应对高大建筑的消防问题,举高喷射消防车、墙壁破拆消防车和举高多剂联用消防车等[1] 应运而生。但由于这些消防车臂架完全超过了消防人员的视野范围,消防人员并不能很好地控制消防炮的角度位置与角度变化,使得灭火时浪费了大量的灭火剂,并延长了灭火时间。此外,进行灭火操作时消防人员需要近距离操作,这给消防人员增加了危险性[2]。因此,研究能够远距离操作观察消防炮水流喷射角度的消防炮,对于改进举高消防车有着重要意义[3]。
本文设计了一种通过无线操作器实现远距离、可视化角度灭火[4] 的消防炮。介绍了控制消防炮水平旋转和俯仰旋转的驱动电路与电机、消防炮喷射水流角度检测以及无线遥控和控制电路的设计。
1 系统总体设计
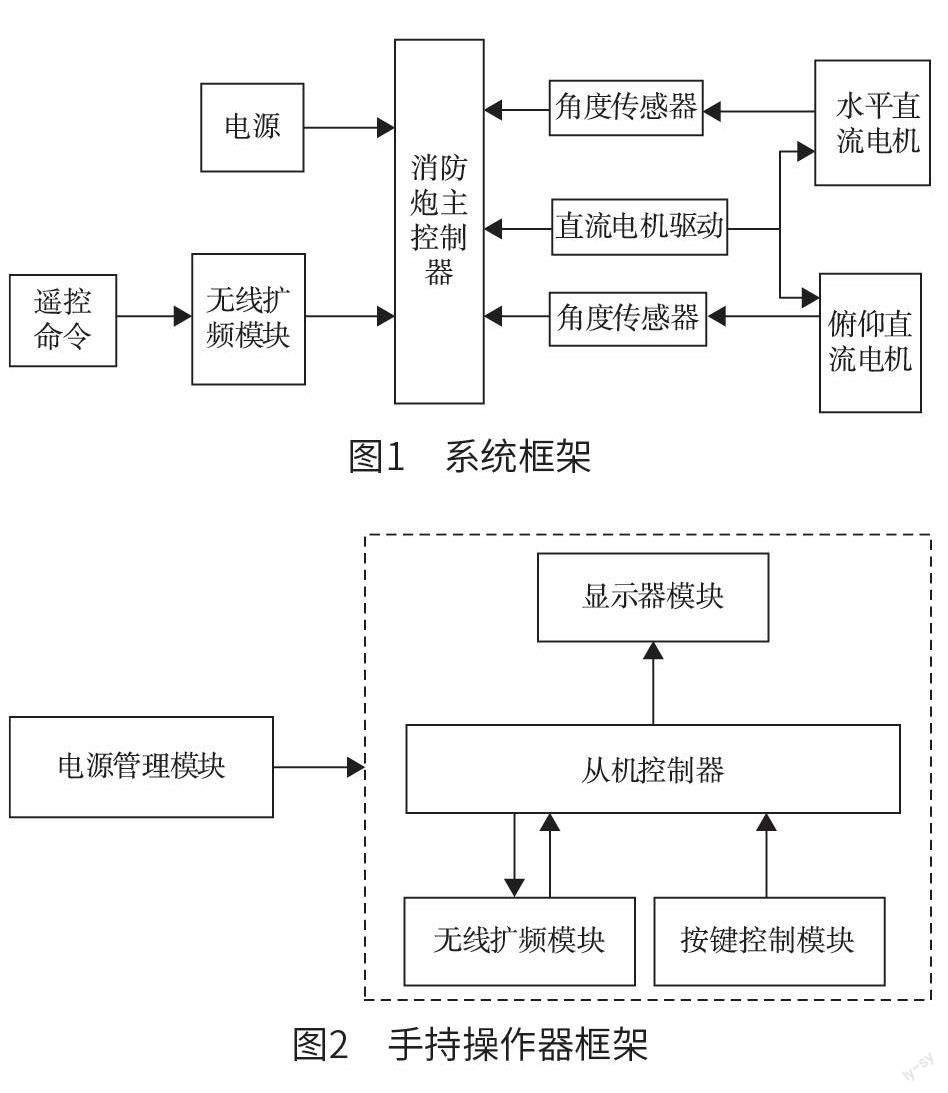
图1 所示为该系统框架,主要由消防炮主控制器、无线扩频模块LoRa(远距离无线电)、水平和俯仰直流电机、消防炮角度位置检测和系统电源等组成。图2 所示为手持操作器框架,其组成包括电源管理模块、从机控制器、OLED(有机发光二极管)屏显示器模块、无线扩频模块LoRa 和按键控制模块等[5]。消防炮主控制器通过无线扩频模块接受来自手持操作器的按键命令,采用直流无刷电机驱动芯片DRV8316 三相集成式 FET(场效应晶体管) 电机驱动器驱动水平和俯仰直流电机,进而实现消防炮的转动控制。角度传感器将炮管的相对角度转化为电压信号,输入给主控制器的AD 采样,控制器通过换算炮管角度传感器电压信号识别出消防炮的角度位置,利用无线扩频模块LoRa 发送给显示器OLED 屏显示当前角度。该系统的优势主要体现在以下3 个方面。
(1)使用直流无刷电机,调速性能好且启动后工作转速恒定,适用于高喷消防车进行大流量喷洒。直流无刷电机采用半导体开关器件实现电子换向,相较于直流有刷电机的物理电刷换向器,其既有直流电机启动和过载能力强、输出力矩大和调速方便的优点,又克服了直流有刷电动机由于机械换向所带来的一系列缺点。
(2)角度传感器采用多圈精密电位器,配合蜗杆齿轮等机械结构可实现其使用范围内采。
(3)基于无线扩频模块LoRa [6] 的通信方式进行角度信息的接收,可实现长距离扩频通信,具有极强的抗干扰性,适用于举高喷射消防车这种远距离控制。
2 系统硬件设计
2.1 主控制器
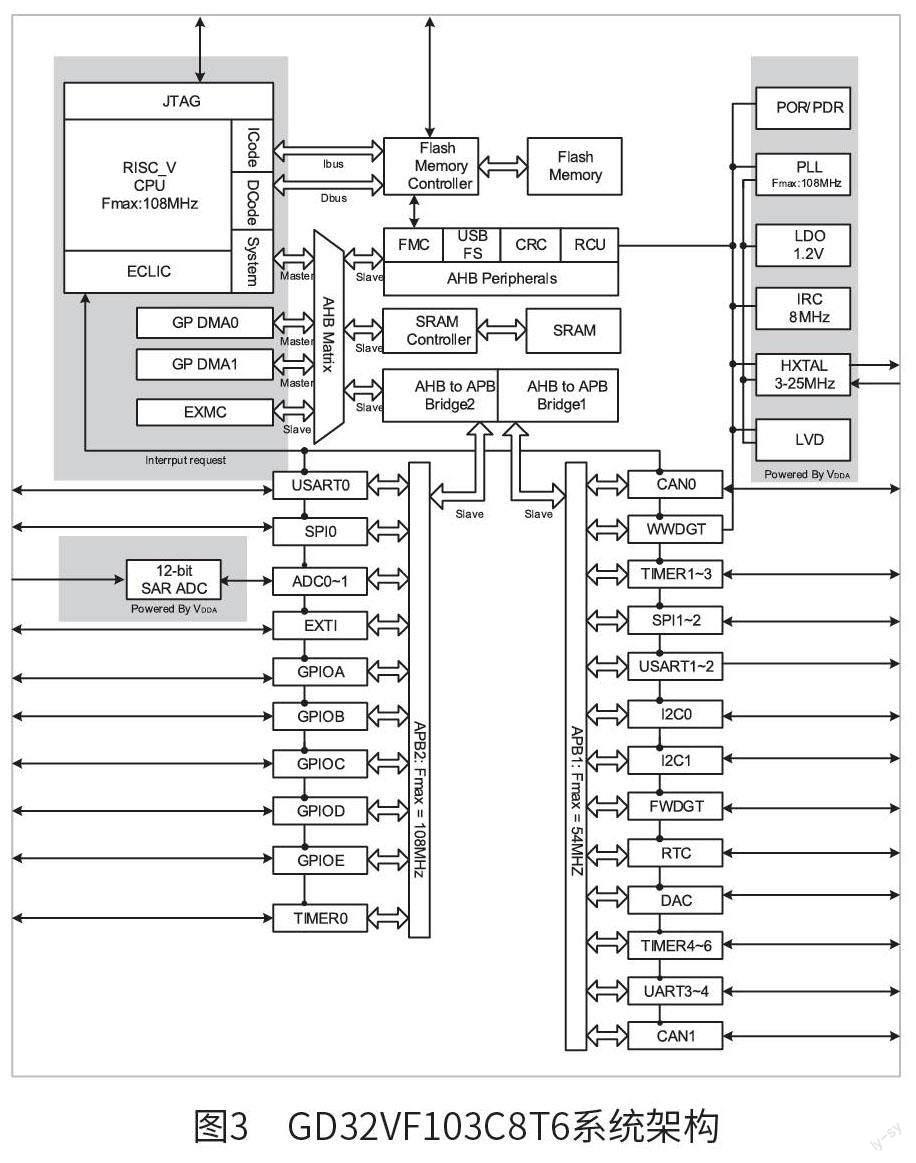
本文选择国产高性能的GD32VF103C8T6 作为主控制器, 主频可达到108 MHz, 它是基于RISC-V 内核的32 位通用微控制器,在给用户提供丰富外设的同时,也体现了其高性能和低功耗。因其FLASH(闪存)访问零等待,效率也能实现最大化,不仅指令执行速度快、实时性好,而且功耗也极低。其拥有32 KB 的SRAM(静态随机存储器)以及高达128 KB 的片上FLASH,丰富的外设包括2 个基础定时器、1 个PWM(脉冲宽度调制)高级定时器和4 个通用16 位定时器等。GD32VF103C8T6 系统架构如图3 所示[7]。
2.2 无线扩频模块
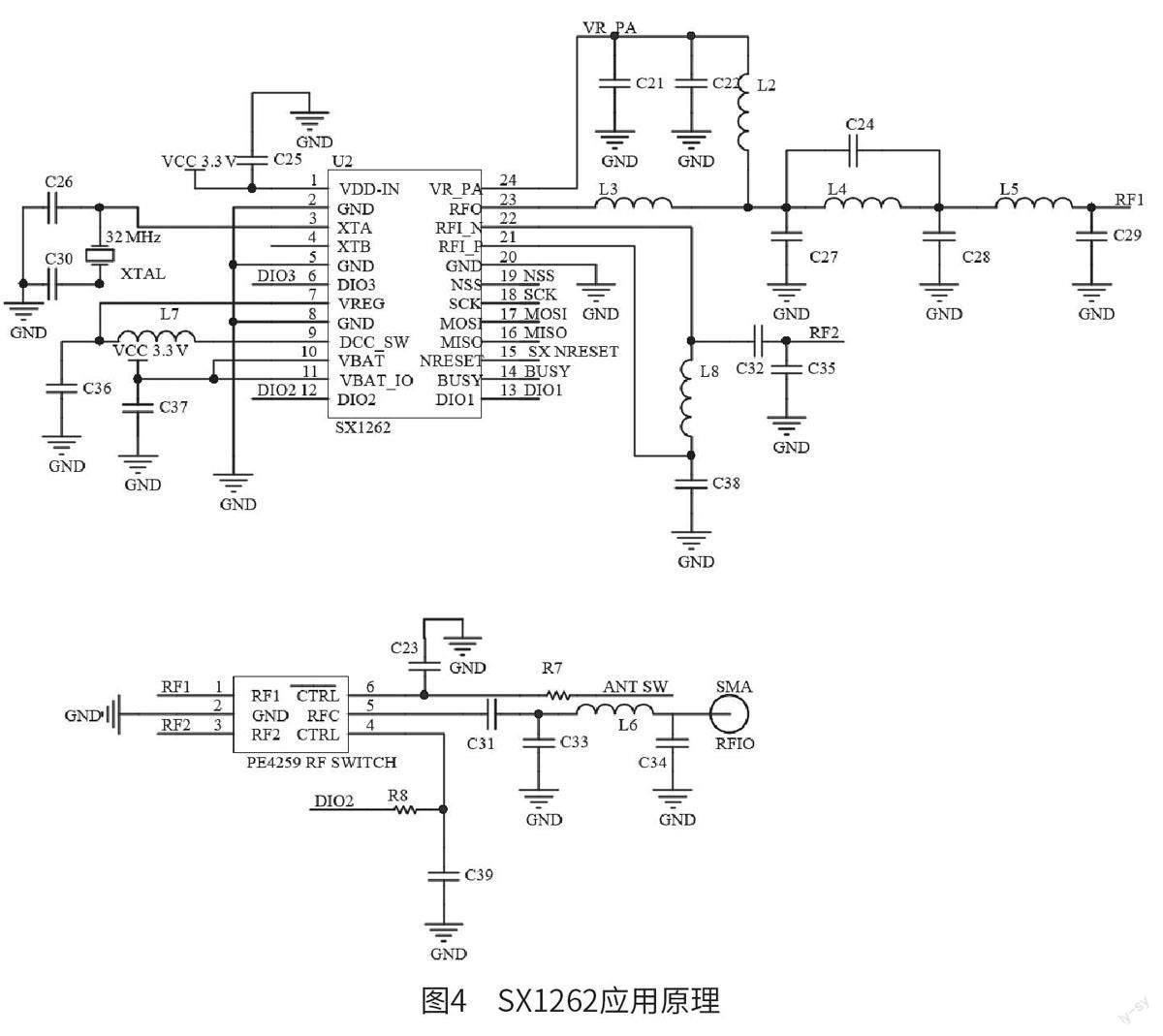
采用SX1262 扩频无线数字收发芯片实现发射与接收,它最大的优点是超远距离传输、抗干扰性强和低功耗,可以最大限度地降低电流消耗;工作电压为1.8 ~ 3.7 V, 灵敏度为-148 dBm, 工作频率为470 MHz ~ 510 MHz,最大发射功率高达+22 dBm [2]。
图4 所示为SX1262 應用原理, 主控制器GD32VF103C8T6 通过SPI( 包括接口SCLK、SDI、SDO、nSCS)串行接口对SX1262 进行配置、管理以及数据收发;BUSY 引脚为忙状态指示,在MCU(微控制器)发送数据之前,需要检测BUSY引脚状态指示,以便当操作器发出按键指令时,与消防炮控制器相连的SX1262 芯片接收到命令,即控制消防炮做出相应的动作。
2.3 直流电机驱动电路
炮体的水平回转和垂直俯仰运动,需要通过电机来控制。本系统选用的是24 V 直流无刷电机[8],主控制器通过直流无刷电机驱动芯片DRV8316T 三相集成式 FET 电机驱动器构成的电路控制消防炮直流电机转动,进而实现水平回转和垂直俯仰运动,对准着火点进行灭火。
DRV8316 是TEXAS INSTRUMENTS(德州仪器)公司推出的三相集成式 FET 电机驱动器。其特点是将3 个1/2H 桥集成在芯片内部,使电机系统更高效、更可靠;工作电压在4.5~35 V,更值得关注的是内部FET 的 RDS(ON)(导通电阻)为95 mΩ, 峰值电流可以达到8 A; DRV8316 还内置3.3 V、30 mA LDO( 低压差线性稳压器) 和3.3 V/5 V、200 mA 降压稳压器,可供其他外设电源使用;DRV8316 还集成多种保护特性,防止出现故障事件,可以保护器件、电机和系统,其硬件电路[9] 如图5 所示。
由主控制器发出驱动芯片的控制信号,SPI(包括接口SCLK、SDI、SDO、nSCS)直接与主控制器通信,通过SPI 接口配置器件,读出故障状态;当DRVOFF 引脚被拉高时,内置的6 个金属—氧化物半导体场效应晶体管(MOSFET)都会被关断,电机停止转动;SOA、SOB、SOC 引脚由电流检测放大器输出,与主控制器AD 相连;将检测到的故障信号通过软件编程后返回给主控制器,可以实时监控驱动芯片的状态,保证在驱动模块出现故障时立即拉低PWM 信号,使系统停机,保障人身和设备安全。当nSLEEP 引脚被拉低时,芯片进入低功耗睡眠模式。
电机供电电压为24 V,CP 与VM 之间接自举电容;AVDD 和AGND 是LDO 内部3.3 V 稳压器输出引脚;SW_BK、GND_BK、FB_BK 引脚与外部电感和电容构成一个降压电路可给霍尔传感器供电。
2.4 消防炮角度检测
消防炮极限位置的检测是检测炮管转动角度的最大限度。如图6 所示,直流电机、控制电路、角度传感器、金属齿轮以及输出轴等装置安装在防护壳体内。直流电机通过金属齿轮带动角度传感器转动,使炮管也随之转动,其中电位器的输出轴与带动炮管的蜗轮蜗杆连接,即可进行水平或俯仰方向的转动。角度传感器将炮管的相对角度转化为电压信号,输入给主控制器的AD 采样。控制器根据炮管角度传感器电压信号通过换算也可以识别出消防炮的角度位置。
多圈精密电位器的原理:将电阻丝在骨架上绕制成环状,通过多圈转动的机械角度,使阻值产生变化,即将机械位移转换为与之成线性或任意函数关系的电阻或电压输出[10]。将电位器用作分压器,电位器接线示意如图7 所示,图中1 脚接电源输入端;3 脚接地;2 脚接电压输出端。当调动电位器的转柄时,动触点在电阻体上滑动,此时在电位器的输出端可获得电位器外加电压和与可动臂转角成一定关系的输出电压。
2.5 电源设计电路
系统电路板正常情况下需要的工作电压有:直流电机工作电压为24 V、主控制器3.3 V、精密多圈電位器5 V、无线收发模块3.3 V。图8 为电源设计电路,系统通过开关稳压芯片78L05,将24 V输入电源转换为+5 V,供给电位器;再将5 V 电源通过线性稳压芯片AMS1117-3.3 V(输出电压为3.3 V 的正向低压差稳压芯片)稳压得到+3.3 V 电源,供给主控制器和无线收发模块。
3 系统软件设计
高喷消防车的消防炮控制系统软件设计包括消防炮主控制器和手持操作器两个部分,其程序由主程序控制模块、通信控制模块、外围硬件控制程序模块和中断程序模块4 个部分组成。系统主控制器工作流程如图9 所示,主程序控制模块对各个模块进行初始化;等待操作器发出命令,消防炮的动作受手持操作器按键指令控制,当系统收到操作器的命令,水平或俯仰电机会按照相应指令动作,再继续等待下一个按键命令状态。
手持操作器工作流程如图10 所示,主程序控制模块同样对各个模块进行初始化,等待按键输入,通过无线模块向消防炮主控制器发送操作指令;收到SX1262 中断,OLED 屏显示出当前消防炮角度信息等。
针对SX1262 芯片,本文选择的是LoRa 调制解调,其具有隐性和显性两种数据包格式,采用数据包格式增加了信号的覆盖范围和无线通信链路的鲁棒性。不同的数据包格式都有其优点,本文选择的是显性模式。具体参数需要进行程序中参数的设置,以下是根据实际需求设置的收发端各个模块的关键参数:
G_LoRaConfig.LoRa_Freq=Fre[0]; // 中心频率470 MHz
G_LoRaConfig.BandWidth=LORA_BW_125;//BW=125 kHz
G_LoRaConfig.SpreadingFactor=LORA_SF7; //SF=7
G_LoRaConfig.CodingRate=LORA_CR_4_6;//CR=4/6
G_LoRaConfig.PowerCfig=22; // 最大输出功率可达22 dBmG_LoRaConfig.HeaderType=LORA_PACKET_EXPLICIT;// 包头格式设置,显性包头:LORA_PACKET_EXPLICIT;隐性包头:LORA_PACKET_IMPLICIT; 若设置为显性包头, 发送端会将PalyLoad 长度、编码率、CRC 等加入包头中发送给接收端
G_LoRaConfig.CrcMode=LORA_CRC_ON;//CRC 校验开启:LORA_CRC_ON;关闭:LORA_CRC_OFF
G_LoRaConfig.InvertIQ=LORA_IQ_NORMAL;
G_LoRaConfig.PreambleLength=8;// 前导码长度
G_LoRaConfig.PayloadLength=10;// 数据包长
4 结论
本文针对高喷消防车的消防炮设计了一款基于国产高性能的GD32VF103C8T6 单片机和无线扩频模块SX1262 的可远距离进行无线数据传输并可视水流喷射角度的消防炮系统。该系统能实现消防炮水流喷射角度的检测,同时增加了无线扩频模块SX1262,实现角度数据的远距离收发,从而达到消防炮水流喷射角度信号传输回手持操作器的OLED 屏上进行显示,使操作更加人性化。该系统运用了传输距离远、传输数据可靠稳定、功耗低的LoRa 无线扩频通信技术,将其应用于高喷消防车,能给消防人员带来极大的好处和便利。
