面向小型电子系统的智能光伏电源设计
2023-12-20包祖超程泰之卜凡朕
包祖超,张 含,程泰之,卜凡朕,李 昂
(南京理工大学紫金学院,江苏 南京 210000)
0 引 言
随着城市化的快速发展,诸多挑战接踵而至,如资源的破坏和环境的污染限制了城市发展的速度,影响了居民的生存和发展。2017 年,国务院转发国家发展改革委、住房城乡建设部《生活垃圾分类制度实施方案》,大力推进生活垃圾分类,提升城市管理和服务,创造优良的生活环境,并在46 个城市先行试点实施,取得良好效果[1]。垃圾分类有助于减少占地与污染,变废为宝。由此,智能垃圾桶应运而生,但却面临供电困难的问题。随着能源危机和环境压力不断加大,如何高效利用太阳能已然成为当今研究的热点。太阳能是一种高品质的清洁能源,其具有资源丰富、安全、廉价、可自由利用等特性。然而在大多数太阳能发电系统中,太阳能采集板的架设方向均固定,无法随着太阳光线的偏斜而变化,大大降低了太阳能的使用率。采用太阳能自动追踪技术可以有效提升太阳能的发电效率,据相关研究调查显示:同等条件下,采用自动跟踪系统相比固定装置系统的发电量提高约30%[2]。因此,如何实现高效的太阳能自动追踪是当前急需解决的问题。
目前,国内外实现的太阳能自动追踪技术主要分为两种:一种是视日追踪法,其由程序控制,预先设计好运动轨迹,根据所在地区的经纬度和具体时间,由javascript:void(0)程序计算太阳的方位角、高度角。它可以不受天气状况的影响实现全天候自动追踪。但同时也存在弊端,该方法对经纬度和时间信息的精准性有着很高的要求。另一种是光电跟踪法,其通过光敏传感器实时监控太阳位置,依据光照强度的不同转换成不同的数字信号,然后把电信号传输到控制器,再由控制器控制轴运动。该方法与视日追踪法相比,操作更便捷,灵敏度更高,追踪的准确度也更高,但易受天气影响,特别是遇到阴雨天气,存在较大的误判风险[3]。
据此,本文设计了一款基于Arduino 单片机的4 路光敏传感器与双轴结合的自动太阳能追踪系统。通过系列试验验证了该系统的正确性和有效性。
1 系统总体设计方案
本系统主要由Arduino 单片机、光敏电阻、SG90 舵机、GN3795 太阳能充电模块等组成。总体设计框架如图1 所示。

图1 总体设计框架
1.1 Arduino 单片机
Arduino 单片机处理速度快、兼容性好,硬件资源丰富,核心为ATmega328P 微控制器。它有14 个数字输入/输出引脚(其中6 个可用作PWM 输出),6 个模拟输入,16 MHz晶振时钟,USB 连接,电源插孔,ICSP 接头和复位按钮。其功能强大,功耗低,只需5 V 电压便可驱动,使用方便。
1.2 追光模块设计
为保证光敏传感器能够精确检测到有效信号,本设计将4 个光敏电阻传感器分布在平面直角坐标系的4 个象限内[4]。此设计较5 个光敏电阻传感器的设计而言,追光效果更明显。原因在于5 个光敏传感器(位于4 个象限和原点)中原点接收的光照强度最大,不能准确识别太阳的具体方位。当太阳光线照射到光敏电阻传感器时,经A/D 转换器将信号传输给单片机的微控制器。
1.3 双轴装置设计
为充分提高自动追踪效率,自动追踪装置采用双轴追踪方式,如图2(a)、图2(b)所示。装置包括水平转轴和竖直转轴,确保太阳光线照射的方向始终与太阳能电池板保持垂直,进而提高太阳能采集效率。

图2 装置设计
2 系统总体设计
2.1 追光模块的原理及其算法设计
本设计使用的追光模块为光敏电阻,如图3(a)所示。这是由一种半导体材料制成的光电子元件,光敏电阻较其他光电传感器具有灵敏度高、成本低和稳定性好等优点。光敏电阻受光照射后电阻值发生变化,光照强度与其阻值负相关,光照强度越强,其对应的阻值就越小。光敏电阻的工作原理如图3(b)所示。

图3 光敏电阻及其工作原理
追光模块的工作原理:用两块不透明且中轴线有槽的木板把平面隔成平面直角坐标系的4 个象限,当太阳光线照射到追光模块时,某个象限内的光敏传感器检测到光照强度最强时,其余3 个象限可能由于被木板所挡,不能被照射到或照射的光照强度比较弱。进而获取4 个象限内光敏电阻的检测值,传输给微处理器,经过一系列算法分析处理,确定追踪装置的转动方向[5-6]。
追光模块模型如图4 所示。在水平方向:当Ⅰ和Ⅳ象限的测量值大于Ⅱ和Ⅲ象限的测量值时,表明Ⅰ、Ⅳ象限的光照比较强,水平方向的舵机向左转;反之,向右转。在竖直方向:当Ⅰ和Ⅱ象限的测量值大于Ⅲ和Ⅳ象限的测量值时,竖直方向的舵机会向上翻转;反之,向下翻转。水平方向转轴追踪算法如图5 所示[4],其中,模拟量a值代替光敏电阻的测量值。
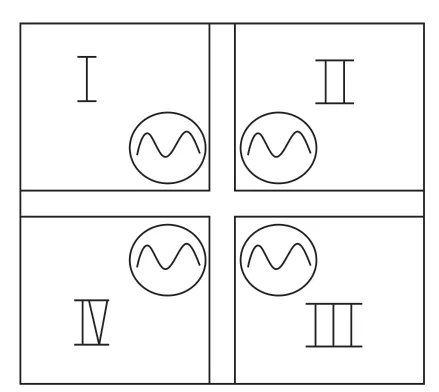
图4 追光模块模型

图5 水平方向转轴追踪算法
2.2 追光舵机控制系统设计
本设计选用的是适用于角度不断变化并可以保持的SG90 伺服舵机,如图6 所示。工作原理:由接收机发出信号驱动舵机转动,通过减速齿轮将动力传递给摆臂,同时由位置检测器送回信号,进而判断是否已经到达指定位置[7]。位置检测器的实质是一个可变电阻,当舵机转动时电阻发生变化,由此可知舵机转动的角度。如转轴的位置与控制信号相符时,电机关闭。如果控制电路察觉到转动角度不对时,便会启动电机,直至角度到达预定位置。
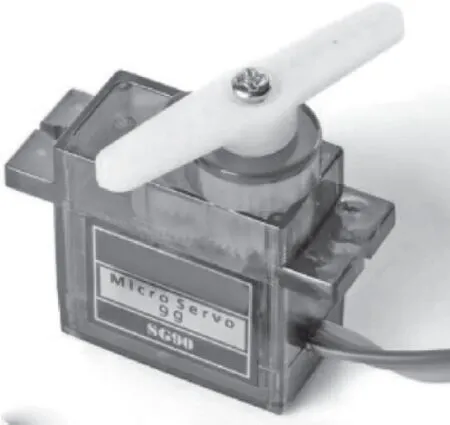
图6 SG90 伺服舵机
3 实验结果
组装好的太阳能自动双轴追踪装置如图7 所示,实验硬件控制装置如图8 所示。

图7 太阳能自动双轴追踪装置
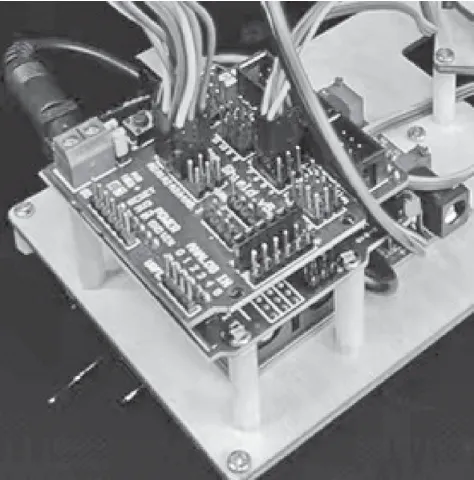
图8 实验硬件控制装置
为确保实验的有效性,本测试方案将该装置置于光照较弱的室内和光照较强的室外,在早、中、晚三个时间段分别测试,得出更准确有效的结论。将装置置于光照较弱的室内,在早晨和傍晚光照极弱的环境下,追光装置对光线追踪不太准确。在光照较强的室外,无法准确追踪太阳的方位。因光敏电阻的阻值与光照强度呈负相关,光敏电阻的阻值变化还与光的波长、光敏电阻本身的材料特性有关[8-10],因此在选择光敏电阻时,需考虑光敏电阻自身的材料特性。为保证本装置能在光照较强的室外正常工作,我们在光敏电阻前加了一块有色玻璃,降低太阳直接照射的光照强度。实验证明,该方法行之有效。测试结果见表1 所列。
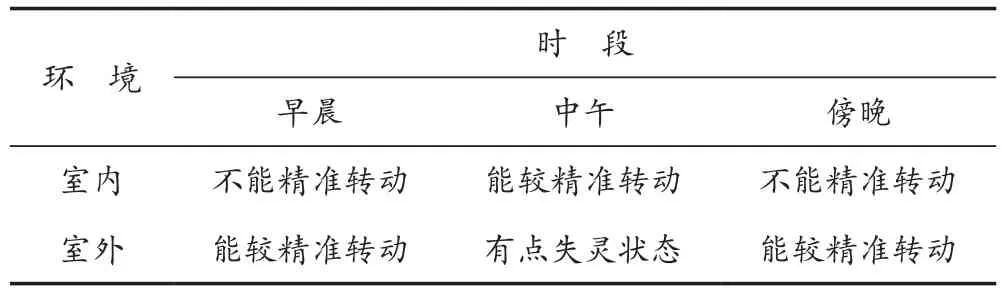
表1 测试结果
据此实验测试结果得出以下改进措施:
(1)本自动追光装置在光照较强的环境下,需要在光敏电阻前加上有色玻璃,可有效减弱光强,进而增强追光装置的灵敏度。
(2)在光照较弱的环境下,光敏电阻的感光灵敏度还有待提升,可以换用灵敏度更高的光敏电阻。
4 结 语
面向小型电子系统的智能光伏电源基于Arduino 单片机设计。本设计将光电追踪与双轴转动相结合,极大提高了系统对太阳光线追踪的准确性,进而切实提高了太阳能的转化效率。而在选择光敏电阻时,因光照强度过大导致光敏电阻失灵,本文提出了两种解决方法:一是在光敏电阻前加上有色玻璃,有效削弱光照强度过大对光敏电阻的影响;二是换用耐光性更强的光敏电阻。相信本设计能够极大助力太阳能发电,节约能源。
注:本文通讯作者为李昂。
