基于物联网的无人机仿真与测试系统设计
2023-12-20高宇航向政蓉黄庆南吴和龙吴其琦
高宇航,向政蓉,黄庆南,吴和龙,吴其琦
(1.广西科技大学 自动化学院,广西 柳州 545006;2.广西科技师范学院 机电学院,广西 来宾 546199;3.工信部电子第五研究所,广东 广州 511370)
0 引 言
无人机结合物联网的应用越来越广泛,例如利用无人机完成测量环境参数、搬运货物等任务[1-2]。由于影响飞行的不确定因素越来越多,因此对飞行控制系统(以下简称飞控)的设计与开发提出了更高的要求。Pixhawk 是一款开源、可二次开发的飞控,支持多旋翼、固定翼等类型的无人机,在工业、农业、民用等领域得到了广泛使用[3]。因此,针对Pixhawk 飞控设计飞行仿真系统用于验证无人机的新航线、新功能或新算法,都具有积极的现实意义[4-5]。对于飞控的设计,验证其正确性和稳定性尤为重要。如果使用全软件仿真对飞控系统进行验证,由于仿真环境理想化,因此无法反映无人机飞行时的真实情况;如果使用真实无人机测试,由于设计的飞控系统存在不确定性,可能会出现坠机危险,试验风险大;而硬件在环仿真具有较真实的仿真效果,也不存在测试风险,因此是一种较好的仿真方式。
目前,国内外已经有多所科研单位以及高校对飞控硬件在环仿真系统进行研究。吕永玺等人结合无人机数学模型和xPC 实时系统设计了无人机飞控半实物仿真系统[6];李瑞等人采用上位机、仿真计算机、飞控三部分相结合的方式设计了基于VxWorks 的四旋翼半实物仿真平台[7];Yaqub 等人通过飞控硬件控制无人机模型,实现了在环仿真系统,并使用FlightGear 显示仿真飞行画面[8]。目前,大多数无人机仿真系统使用专用飞控,缺乏通用性,难以推广。此外,在仿真完成后,缺少实际飞行测试功能用以验证仿真效果。
因此,针对上述仿真系统的不足,设计了基于物联网的无人机仿真与测试系统。系统基于Pixhawk 开源飞控,能够为使用Pixhawk 飞控的无人机进行硬件在环仿真,具有良好的通用性;测试系统装备了物联网通信设备,能够实现单机或多机的远程测试;系统使用服务器存储数据,便于测试数据的采集、分析与管理。
1 总体设计方案
无人机仿真与测试系统结构如图1 所示。系统由无人机、云服务器、仿真计算机和飞行地面站组成,具备硬件在环仿真与实际飞行测试功能。在室内仿真时,无人机与飞行地面站通过WiFi 连接云服务器,实现无人机与地面站的连接。飞控与仿真计算机连接后进行硬件在环仿真,使用飞控驾驶仿真计算机的无人机模型在虚拟环境中飞行,并将飞行数据发送至云服务器。在进行室外飞行测试时,飞控驾驶真实无人机飞行,无人机和地面站通过5G 网络与云服务器连接,使得无人机具备远程通信能力,地面站能够控制单机或多机同时飞行。在无人机飞行过程中把飞行数据通过物联网设备发送到云服务器中,并存储在云服务器。当无人机飞行测试完毕后,从云服务器获取飞行数据进行分析。

图1 无人机仿真与测试系统结构
2 硬件系统设计
为了使无人机具备物联网接入功能,在Pixhawk 飞控上进行硬件二次开发,在原硬件的基础上加入了5G 与WiFi 模块。当无人机在室外进行真实飞行测试时,使用5G 网络实现长距离数据传输;当在室内仿真时,使用WiFi 传输数据,以减少流量的消耗。系统硬件结构如图2 所示。

图2 Pixhawk 飞控硬件结构
Pixhawk 飞控采用带有FMU 的32 位STM32F427 芯片作为主处理器[9],采用STM32F103 芯片作为协处理器,并采用双加速度计和双陀螺仪结构,保证无人机飞行的稳定性[10-11]。主处理器与协处理器间通过DMA 交互,如果在无人机飞行时主处理器发生错误,无法对动力系统进行控制,此时协处理器获得电机的控制权,控制电机在安全模式下继续运行,直到检测到主处理器能够正常控制电机为止。因此,采用主协双处理器结构能够提高系统的稳定性和安全性。姿态控制模块通过加速度计、陀螺仪、磁力计对无人机的姿态进行感知和测量,位置控制模块通过GPS 和气压计对无人机当前所处的位置及高度进行测量。
对飞控硬件二次开发的重点是加入物联网通信模块,其中,5G 模块选用的是移远RG200U 模组,该模组支持国内四大运营商,内置丰富的网络协议,集成了多个工业接口,支持多种驱动和软件,适用于大多数物联网设备;WiFi 模块选用ESP8266 芯片,该芯片具有超低功耗,并且性能稳定,有多种工作模式和外设功能,可满足室内仿真时数据传输的要求[12]。为了把通信模块封装在飞控内,重新设计了飞控电路板与外壳,如图3 所示。新设计采用微型镀金航空插头引出所有信号线,提高了连接的可靠性;为传感器模块构建避震结构以提高飞行稳定性;使用铝合金外壳以提高抗电磁干扰能力。

图3 具有物联功能的Pixhawk 飞控
3 仿真系统设计
硬件在环仿真系统设计方案如图4 所示。仿真系统主要由Pixhawk 飞控和仿真计算机组成。飞控作为硬件部分接入仿真系统,仿真计算机运行无人机仿真模型与虚拟飞行场景,通俗地说,硬件在环仿真就是使用飞控驾驶计算机中的无人机模型在虚拟场景中飞行。无人机仿真模型输出位置与姿态数据(简称位姿数据)送至飞控的内核,运算后得到转速数据,内核再把转速数据送至计算机,控制仿真模型,形成硬件在环的闭环控制。
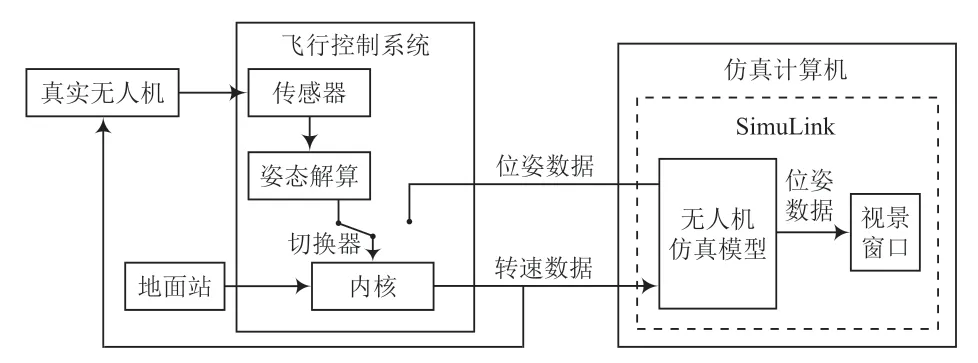
图4 硬件在环仿真系统设计方案
仿真计算机运行MATLAB 软件,在SimuLink 环境中运行无人机模型,同时嵌入运行视景窗口软件[13]。无人机仿真模型的结构如图5 所示,包括动力单元模型、控制效率模型和无人机刚体模型。模型的输入信号为四轴电机的转速数据,输出为模型的位姿数据[14]。视景窗口选用FlightGear 开源飞行模拟软件,使用位姿数据显示仿真过程中无人机模型的飞行画面。使用Mission planner 地面站软件实现无人机的飞行控制、参数设定与状态监控等功能[15]。

图5 无人机仿真模型
为了使Pixhawk 飞控具备硬件在环仿真功能,在原生软件的基础上,设计了仿真接口程序。接口程序从飞控串口接收仿真计算机的位姿数据,再传递到飞控内核参与运算;同时,从飞控内核取出电机的转速数据,通过串口发送至仿真计算机。当进行硬件在环仿真时,通过参数设定切换器使用外部位姿数据,飞控根据位姿数据计算电机转速,在无人机模型与飞控间形成闭环的飞行控制。当进行实飞测试时,设定切换器使用传感器解算得到的位姿数据,在飞控与无人机间形成闭环控制环路,控制真实无人机在真实环境下飞行。
4 测试系统设计
飞控测试系统在四旋翼无人机上搭建,硬件主要包括四轴机架、电机、电调、遥控器等固有设备,以及经过二次开发后包含了5G 模块与WiFi 模块的Pixhawk 飞控。在软件设计方面,主要是在Pixhawk 原生软件中加入相关通信功能,实现飞控通信功能的软件结构如图6 所示。主要包括飞控内核、MAVLink 通信协议以及自主设计的5G 驱动和WiFi 驱动。在传输数据时,飞控内核使用MAVLink 协议把无人机的位置数据、姿态数据、心跳数据等关键数据封装成为MAVLink数据包,再通过5G 或WiFi 驱动传输到相应的通信模块。当通信模块收到地面站发送的控制指令时,利用MAVLink 协议解析数据包,读出相应指令后传输至飞控内核,实现对无人机的远程控制。
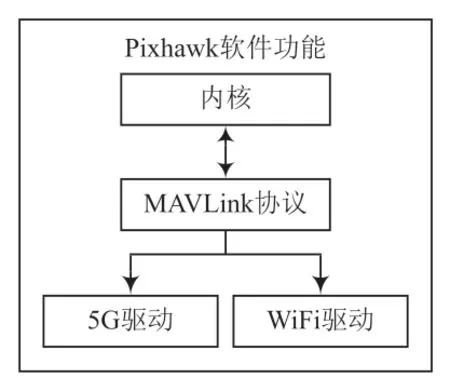
图6 飞控通信功能结构
MAVLink 通信协议是一个专门为微型飞行器设计的只由头文件构成的信息编组库,用于无人机与地面站之间的双向通信,该通信协议具有高效、稳定、多机通信等特点[16]。在通信过程中,TCP/IP 协议把MAVLink 数据包传输至服务器,MAVLink 数据包成为TCP/IP 协议的载荷。TCP/IP 与MAVLink 的关系如图7 所示。

图7 TCP/IP 与MAVLink 的关系
服务器的功能是存储测试数据以及转发飞控与地面站之间的通信数据,成为两者之间数据传输的桥梁。服务器软件的逻辑功能结构如图8 所示。服务器主要由MAVLink 解析与封装模块、数据存储模块、转发模块组成。当地面站发送指令时,服务器先解析MAVLink,获取目标无人机编号后再把数据包发送至相应的无人机,实现指令的转发。当飞控向服务器发送数据时,服务器先解析MAVLink,如果是数据包则送到数据存储模块存储,如果是心跳包则发送给地面站。
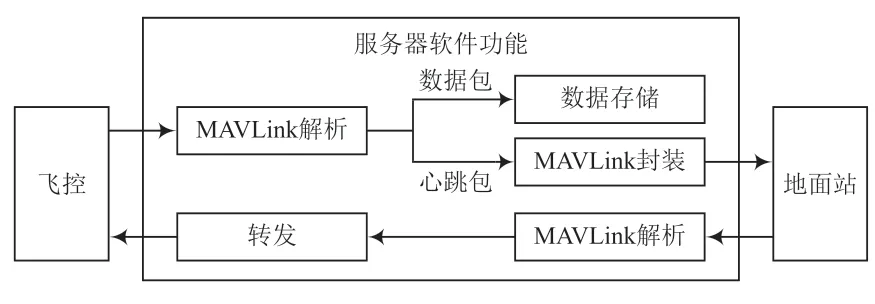
图8 服务器软件功能结构
5 仿真与测试
无人机仿真与测试系统实物如图9 所示,包括四旋翼无人机、仿真计算机与地面站。无人机的飞控经过二次开发后具备了仿真与通信功能。飞控与仿真计算机相连进行硬件在环仿真,在图中四旋翼无人机的基础上构建无人机的仿真模型。无人机与地面站同时连接云服务器,实现无人机与地面站的互连。在进行硬件在环仿真时,首先借助参数指定飞控使用无人机仿真模型的位姿数据;然后运行SimuLink 中的无人机模型,与飞控进行位姿数据与转速数据的交互通信;通过FlightGear 视景窗口显示无人机的3D 飞行画面,并使用Mission Planner 地面站对飞行数据进行观测和分析,仿真飞行界面如图10 所示。硬件在环仿真完成后,修改参数,指定飞控使用真实无人机的位姿数据,然后进行室外实际飞行测试。无论是仿真或实飞测试,飞行数据都保存在云服务器中,供后期分析使用。

图9 硬件在环飞行仿真系统实物

图10 无人机仿真飞行界面
为验证仿真效果的真实度,使用相同航线进行仿真飞行与真机飞行。飞行航线如图11 所示,航线中共设有7 个航点,无人机从初始位置航点H 起飞,高度设定为20 m,飞到2 号航点(2 号航点与6 号航点重合),按照航点顺序绕航线飞行,直到飞到6 号航点,无人机自动返回初始航点,至此完成一次飞行,航时约160 s。
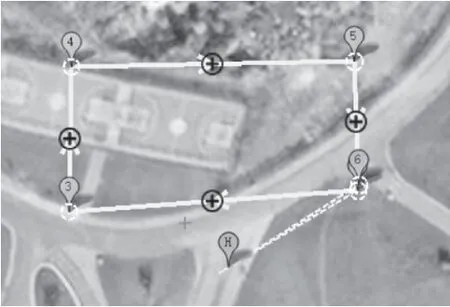
图11 无人机飞行航线
完成仿真与测试后,从服务器获取仿真飞行与真机飞行的数据进行分析。图12 是无人机横滚角、俯仰角和偏航角的数据曲线。数据曲线显示,整个飞行过程中各种角度的曲线在两种飞行模式下变化趋势一致,没有出现发散或者振荡等异常情况;在局部放大图中,两种飞行模式的曲线在相互交织与小幅波动中随时间轴延伸,表明数据差异小,一致性好。然后再综合分析位置数据、速度数据与转速数据等,表明仿真的真实度较高。
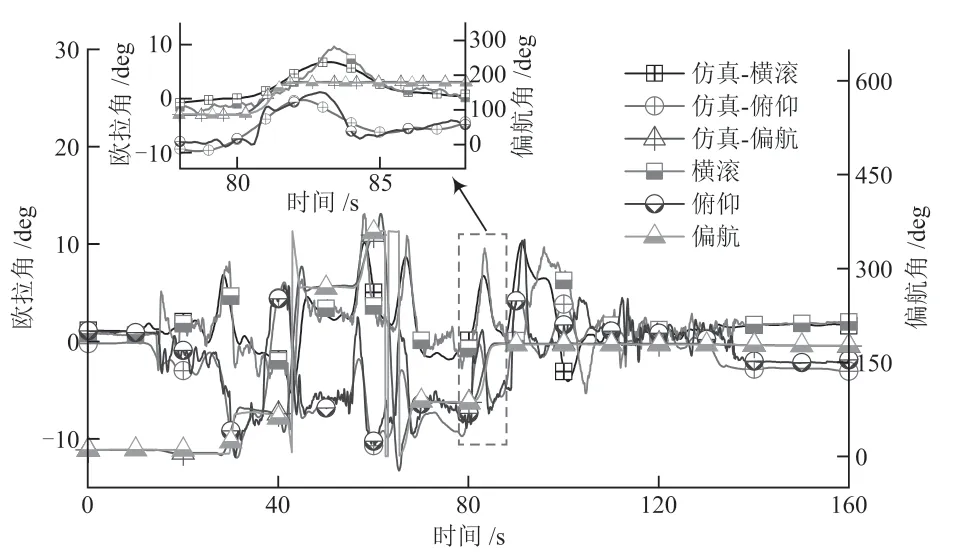
图12 无人机姿态角曲线
为降低真机飞行时受风力、风向与气压等环境因素带来的随机性,让多机同时飞行采集多份数据,经过多数据融合后能更好分析仿真的真实度。多机飞行测试时仍然使用图10的航线,但在水平位置上错开以避免撞机。图13 为仿真模型与三架无人机的飞行高度,数据显示,四条曲线一致性较好。在无人机上升至20 m 的飞行高度后,三机的飞行曲线在仿真曲线上下小幅波动,表明仿真曲线与实飞曲线较接近。各条曲线未出现断续等异常情况,验证了系统物联网通信功能的准确性。
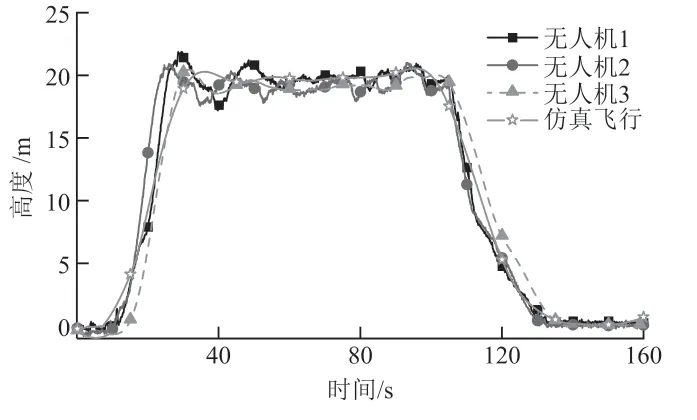
图13 无人机飞行高度
6 结 语
本文首次提出并实现了在Pixhawk 开源飞控上增加硬件在环仿真功能,从而为大量使用Pixhawk 飞控的无人机进行仿真,具有较好通用性与实用价值。在Pixhawk 飞控上增加了物联网通信功能,成功把仿真功能与测试功能相结合,为仿真结果的验证与测试工作带来很大便利。目前,仿真与测试系统仅是一个雏形,系统仍然依赖MATLAB、FlightGear与Mission Planner 等软件,若能把相关功能整合在一个软件中,则功能将更强大,操作更便利,更易于推广应用。
注:本文通讯作者为向政蓉。
