小型SERF原子磁力计三轴静磁场主动补偿电路设计
2023-12-19姚泽坤郭清乾冯晓宇涛2寅2吴中毅2严2杨晓冬
姚泽坤,王 青,郭清乾,,冯晓宇,胡 涛2,,5,张 寅2,,吴中毅2,,常 严2,,杨晓冬,3,
(1.长春理工大学电子信息工程学院,吉林长春 130022;2.中国科学院苏州生物医学工程技术研究所,江苏苏州 215163;3.中国科学技术大学生物医学工程学院(苏州),安徽合肥 230026;4.季华实验室,广东佛山 528200;5.济南国科医工科技发展有限公司,山东济南 250101)
0 引言
原子磁力计是一种新型的超高灵敏极弱磁(fT量级)探测传感器,其在地质勘测[1-2]、航空航天[3]、生物医疗[4-5]、基础物理研究[6-7]等领域具有广泛的应用前景。传统极弱磁传感技术-超导量子干涉仪(superconducting quantum interference device,SQUID)[8-9]需要液氦低温环境,且体积庞大,维护成本高,应用受限。而原子磁力计无需液氦,且结构简单,易小型化,已逐步成为SQUID的有力替代手段。目前基于无自旋交换弛豫(spin-exchange relaxation free,SERF)理论的原子磁力计灵敏度已经取得突破性进展,在实验平台上可实现0.16 fT/Hz1/2灵敏度[10],已经超越SQUID成为目前灵敏度最高的极弱磁探测手段[11],且其理论灵敏度可以达到1 aT/Hz1/2[12]。
为保证SERF原子磁力计实现高灵敏测量,除需加热到足够温度使其达到较高的碱金属原子粒子数密度外,还需使其处于一个近乎零磁场环境中[13]。而简单通过被动磁屏蔽装置,其内部依然存在一定量的剩磁,外加小型SERF原子磁力计探头内部元件带来的剩磁影响,使得磁力计无法实现灵敏度最优探测,甚至无法处于SERF态。因此,需采用三轴线圈及主动磁场补偿方法将剩磁进一步补偿至零点。对此,国内外诸多研究团队提出了SERF原子磁力计磁场补偿方法。文献[14]提出了一种交叉调制补偿剩磁方法,实现了3个方向磁场的补偿,但补偿精度较低。文献[15]通过在直径1.16 m,长1.22 m的圆柱体上缠绕线圈,构成螺线管结构,实现了单轴磁场补偿,补偿剩磁小于1 nT。文献[16-17]针对泵浦-探测SERF原子磁力计,通过施加交叉调制磁场结合磁力计响应求极值的方式实现了三轴磁场补偿,但需通过手动补偿;对此,文献[18]利用LabVIEW平台结合交叉调制磁场可实现三轴数十pT的主动补偿精度。
然而目前对SERF原子磁力计磁场补偿研究主要基于商业仪器搭建平台系统而成,且需施加调制磁场,系统相对复杂,缺少针对单泵浦光小型原子磁力计磁场主动补偿相关电路的设计和开发。对此,本文针对单泵浦光小型SERF原子磁力计,基于现场可编程逻辑门阵列(FPGA)设计了一套简单快速的三轴磁场主动补偿电路系统,无需施加调制磁场即可实现三轴±60 nT的磁场补偿范围,2个测量轴方向平均补偿精度分别可以达到0.12 nT和0.25 nT,泵浦光轴方向平均补偿精度为0.36 nT,可满足小型SERF原子磁力计高灵敏测量要求。
1 SERF原子磁力计三轴磁场补偿原理
当原子磁力计处于SERF工作态时,碱金属原子的自旋极化矢量的整体变化可以用Bloch方程描述[18-19]:
(1)
式中:P为原子极化率;q为核减速因子;γe为电子旋磁比;B为外磁场矢量;s为泵浦光光子的极化率;z轴为泵浦光方向;Rop为光泵浦速率;Rrel为总弛豫速率。
为方便运算,定义一个正比于外磁场B的无量纲量:
(2)
在碱金属原子处于变化缓慢的静磁场环境时,可得到式(1)的稳态解(dP/dt=0):
(3)
(4)
式中:P0为平衡自旋极化率;Px,Py,Pz分别为三轴方向原子自旋极化分量。
本文采用单泵浦光测量模式,光电二极管接收泵浦光方向透射光强。定义泵浦光方向为Z轴,此时光电二极管输出信号V正比于Pz,则
(5)
由式(5)可知,光电二极管输出电压中包含三轴磁场信息,可用于三轴磁场补偿。由V分别对βx,βy,βz求偏导:
(6)
由式(6)可知,在X轴方向上光电二极管输出电压V对βx的偏导与βx异号,且当βx为0时,偏导为0,即磁场Bx为0时,电压V存在极大值。同样可知,当磁场By为0时,电压V亦存在极大值。而在Z轴方向上,电压V对βz偏导与βz同号,因此当磁场Bz为0时,V存在极小值。
实测分别对三轴方向施加扫描磁场,原子磁力计光电二极管输出电压与三轴磁场关系如图1所示,结果与理论相吻合,因此可通过该扫描磁场寻找极值点方法实现三轴磁场补偿。

图1 光电二极管输出电压随扫描磁场变化曲线
2 三轴磁场主动补偿电路设计
本文所用单泵浦SERF原子磁力计磁场补偿结构如图2所示。相比于传统的泵浦-探测原子磁力计,单泵浦方案可简化光路结构以减小整体原子磁力计探头尺寸,本文所用SERF原子磁力计探头尺寸为30 mm×22 mm×15 mm,采用795 nm泵浦光通过光纤耦合输入探头内,内部采用4 mm×4 mm×4 mm的铷原子气室,充入700 Torr(1 Torr=133.322 Pa)氮气作为淬灭气体和缓冲气体,通过无磁加热片可加热至150 ℃,达到SERF态要求。同时探头内部围绕原子气室为中心绕制三轴线圈用于补偿周围静磁场,泵浦光方向平行于三轴线圈Z轴方向,X轴和Y轴方向对应磁力计测量敏感轴。

图2 原子磁力计三轴磁场补偿结构图
对于三轴磁场补偿电路,探头内部光电二极管(PD)接收到经气室吸收后的透射光,经光电信号转换电路转换为电压信号后,给予ADC芯片进行电压采集。FPGA对信号进行运算处理后,控制3路DAC对三轴线圈施加对应的电流,产生补偿磁场,实现三轴磁场顺序补偿。
2.1 光电信号转换电路
本文采用跨阻放大电路实现光电二极管电流电压信号转换,如图3所示。

图3 光电信号转换电路图
根据光电二极管特性,当反向偏置电压为0时,光电二极管工作在光伏模式下,此时二极管中仅存在极小的暗电流,具有最佳的线性度和最小的噪声水平。光电二极管的等效电路如图3中虚线所示,R1为结点分流电阻,典型值为1 GΩ,R1值越高,光电二极管电流噪声越小。C1为结电容,直接影响光电二极管的带宽和响应。电路的反馈回路中电容C2用于保证系统稳定和优化信号带宽BW。
(7)
R2为反馈电阻,阻值大小与电流放大倍数密切相关。R2阻值越大时,放大倍数越大,跨阻增益越高,光电二极管输出电压(Vout)越大。但需选择具有严格容差和低温度系数电阻以减小热噪声的影响。由于待补偿磁场为静磁场,因此光电二极管的输出信号为直流信号。如图3所示,电路通过设计低通滤波器以有效滤除工频信号(50 Hz)对输出电压(直流)的干扰,进一步提高补偿精度。RC低通滤波器由R3和C3组成。R3阻值选择为与PCB阻抗相同(50 Ω),C3容值为220 μF。根据式(8)可得f≈15 Hz,可以有效抑制工频信号及高频噪声产生的干扰。经过低通滤波器的信号再经过电压跟随电路进行隔离,以保证ADC采集电压信号的稳定。
(8)
2.2 ADC采集和DAC输出电路
本文使用的ADC芯片型号为AD7606B,具有8通道同步采样输入,可实现多通道原子磁力计同时采集。此芯片采样分辨率为16位,信噪比可达95.5 dB,最大采样速率为200 kSPS,支持SPI和并口数据传输。±5 V采样范围时带宽15 kHz,满量程误差匹配±16 LSB。具体实现电路如图4所示。
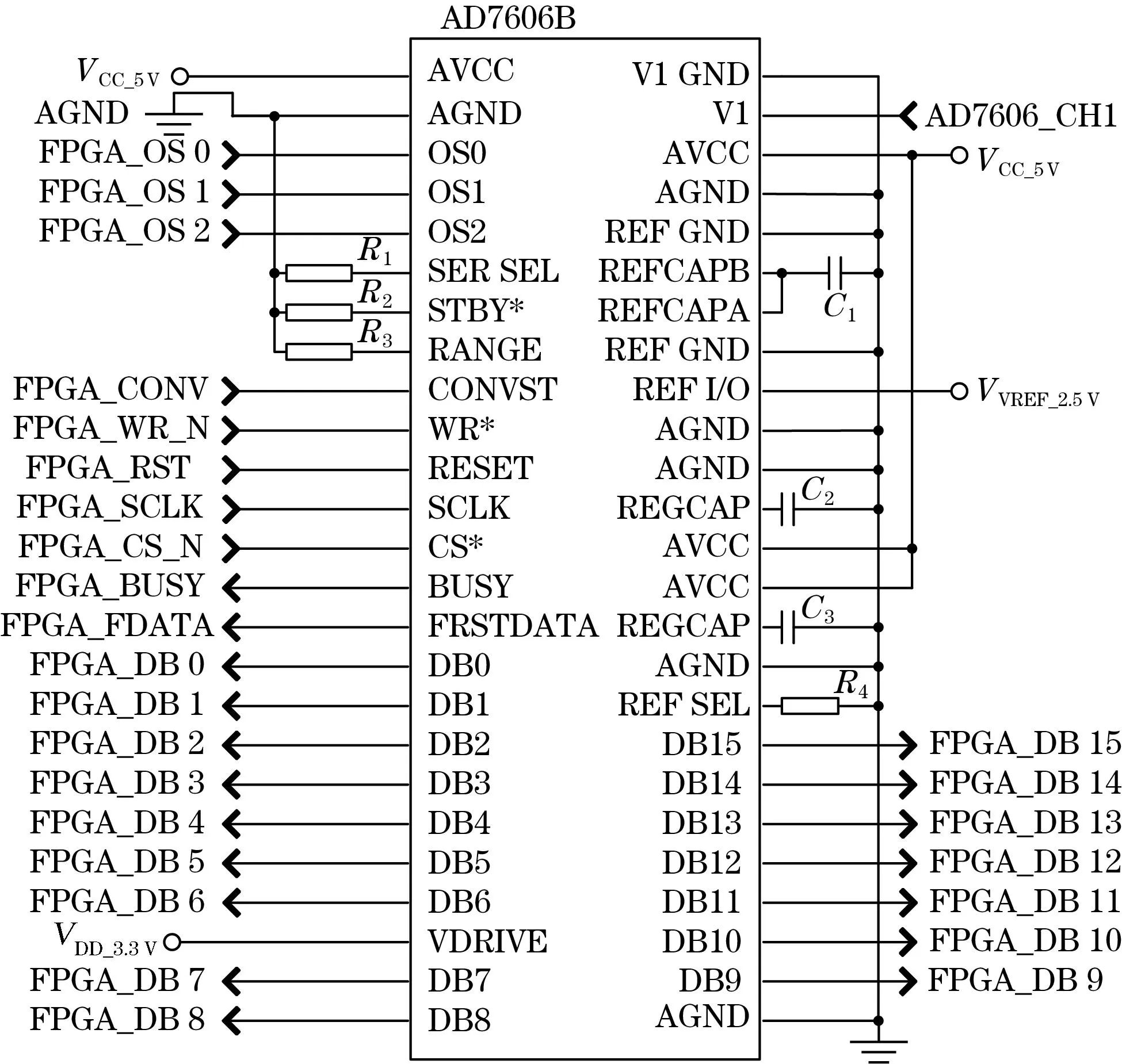
图4 AD7606B电路图
输出DAC选择AD5541A,分辨率为16位,输出范围0~VREF。积分非线性误差(INL)为1 LSB,信噪比为92 dB,具有11.8 nV/Hz1/2的低噪声性能和1.1 nV·s的低毛刺特性。使用SPI通信,SCLK时钟频率达50 MHz,适配FPGA系统时钟。实现电路如图5所示。

图5 AD5541A电路图
该电路参考电压(VREF)为4.096 V,因补偿磁场存在正向和负向,因此在DAC输出后端增加一个差分电路,其中R1=R2,使实际输出电压Vcomp范围为-4.096~ +4.096 V。R3为串联电阻,补偿线圈电流I=Vcomp/R3。因此当R3越小时,可补偿的磁场范围越大。实验中因原子磁力计置于屏蔽筒中,外磁场仅为nT级别,因此R3一般选择为1~10 kΩ。
3 三轴磁场主动补偿流程和测试结果
3.1 三轴磁场主动补偿流程
根据图1的三轴扫描磁场寻找极值点方法,通过FPGA平台实现SERF原子磁力计三轴磁场补偿,补偿流程如图6所示。

图6 三轴磁场顺序补偿流程图
(1)设定三轴磁场扫描范围为-60~60 nT,扫描磁场步进为0.025 nT。初始三轴补偿值均为0 nT,即Bx_c0=By_c0=Bz_c0=0;
(2)对X轴方向进行磁场扫描:每次磁场变化时,测量记录光电二极管的电压。磁场扫描完毕后,输出光电二极管电压最大值时对应的补偿磁场Bx_ cn;
(3)对Y轴方向进行磁场扫描:每次磁场变化时,测量记录光电二极管的电压。磁场扫描完毕后,输出光电二极管电压最大值时对应的补偿磁场By_cn;
(4)对Z轴方向进行磁场扫描:每次磁场变化时,测量记录光电二极管的电压。磁场扫描完毕后,输出光电二极管电压最小值时对应的补偿磁场Bz_cn;
(5)判断三轴方向磁场连续补偿结果差值是否在系统设定阈值范围内,X轴和Y轴方向阈值为0.1 nT,Z轴为0.3 nT。若满足则停止补偿,若不满足则转到步骤(2)进行下一次补偿。
由于探头内部三轴线圈产生的磁场并非理想正交,在对X轴方向进行磁场补偿时,会产生Y轴和Z轴方向的磁场分量;同样在对Y轴和Z轴进行补偿时,会产生另外两个方向的磁场分量。因此系统需要多次循环补偿以尽可能实现零磁场。由图1可知,Z轴方向光电二极管的电压变化范围相较于X轴和Y轴方向小很多,即Z轴方向光强对磁场变化不敏感,因此设定阈值时,X轴和Y轴设定为0.1 nT,Z轴为0.3 nT。
3.2 三轴磁场主动补偿结果
实验过程中,将小型SERF原子磁力计探头置于屏蔽筒内,实验所用屏蔽筒内部剩磁<1 nT。但由于磁力计探头本身存在一定剩磁,因此在补偿前首先利用磁屏蔽筒内部高均匀三轴线圈将剩磁手动补偿至零,确保实验结果不受干扰。为测试补偿效果,利用信号发生器通过串联电阻在X,Y,Z轴同时施加-60~60 nT的外加静磁场,依次进行三轴补偿。相同外加磁场下重复补偿10次,磁场补偿结果如图7所示。

(a)X轴磁场补偿

(b)Y轴磁场补偿

(c)Z轴磁场补偿图7 三轴磁场补偿测量结果
结果显示,不同外加磁场下,在X轴方向,平均补偿精度为(0.25±0.17) nT;在Y轴方向,平均补偿精度为(0.12±0.11) nT;在Z轴方向,平均补偿精度为(0.36±0.27) nT,Z轴补偿精度略低于X轴与Y轴,符合实验预期。补偿精度误差主要来源于泵浦光强不稳定带来的光电二极管输出电压波动,此外虽然光电信号转换电路中的低通滤波器有效抑制了工频干扰,但实验采集中输出电压仍存在几mV的50 Hz正弦信号,造成补偿逻辑极值点的判断误差。
4 结束语
小型SERF原子磁力计高灵敏测量需将周围静磁场补偿至零点,对此,本文利用三轴磁场扫描顺序补偿方法,基于FPGA平台设计了原子磁力计三轴磁场补偿电路系统。在不使用商业仪器不施加调制磁场的情况下,实现-60~60 nT的三轴磁场补偿范围,补偿精度可分别达到0.12、0.25、0.36 nT。对比施加调制磁场补偿精度仍有不足,对采集信号的处理仍有优化空间,但本文电路设计具有结构简单、成本低等优点,符合SERF原子磁力计小型化设计需求,为其多通道拓展及应用研究提供了技术基础。
