分层航摄在峡谷沟道地形图测绘中的应用效果
2023-12-19杨昆仑彭方辉武换咪
杨昆仑,彭方辉,武换咪
(陕西省水利电力勘测设计研究院,陕西 西安 710001)
0 引言
倾斜摄影技术是从垂直、倾斜等不同角度采集影像,获取地面物体更为完整准确的信息。随着小型低空无人机的快速发展,搭载高分辨率数码相机,使得低空无人机航摄技术在大比例尺地形图测绘方面得到广泛的应用,因其具有方便快捷、成本低、工作量小、反应迅速等特点,使得它在小区域、地形条件复杂、人难以到达等地区的高分辨率影像获取方面具有明显优势,成为对传统航空摄影测量技术的有效补充[1]。
分层航摄是建立在航摄分区的基础上,航摄分区主要由地形高差、地物景物反差、地貌类型及航摄飞机侧前方安全距离与安全高度等因素确定,分层航摄是在分区的基础上,为了确保航摄影像的地面分辨率而在不同高度层上的航摄,可以在不同分区或同一分区内使用不同的相对航高来实现分层的目的。
目前对于地形复杂的小区域地形图测绘通常会采用小型无人机倾斜摄影测量方法。小型无人机所搭载的相机镜头焦距一般较小,为了达到大比例尺地形图所需的地面分辨率,需要飞行的相对航高较小,带来较大安全隐患,因此需要进行分区域,分高度进行航摄,以确保每个分区内有效航摄区域地面分辨率满足规范要求。针对陕西省咸阳市彬州市公刘教稼苑景区防护工程测量项目中的峡谷沟道1∶500地形图测绘,采用的分区分层航摄的方法确保了地面分辨率达到0.05 m,满足1∶500 比例尺地形图航测要求。
1 项目概况
公刘教稼苑景区位于陕西省咸阳市彬州市城东45 km 处的龙高镇土陵村泾河左岸的山谷之间,为省级重点文物保护单位。公刘教稼苑景区防护工程是东庄水利枢纽工程的一部分,工程位于泾河左岸土陵沟内,距东庄水库坝址上游约54 km 处,防护整治段沟道长约1 km,设计防护堤线起点位于土陵沟与布村沟交汇处下游约500 m,终点位于土陵沟底789.50 m 高程处。本次整治段沟道需测绘1∶500 地形图,沟道最低高程740 m,梁顶高程900 m,沟道最窄 距离80 m,深度90 m,属于峡谷沟道地形。
2 航摄外业
2.1 航摄地面分辨率及航摄分区
2.1.1 地面分辨率
低空数字航空摄影规范[2]中规定1∶500 地形图地面分辨率应优于0.05 m。
2.1.2 航摄分区
结合本项目地形条件,在保证有效地面分辨率优于0.05 m的条件下进行进行航摄分区,采用以下公式(1)确定相对航高,计算各摄区最高点、最低点及起飞点的地面分辨率(详见表1)。
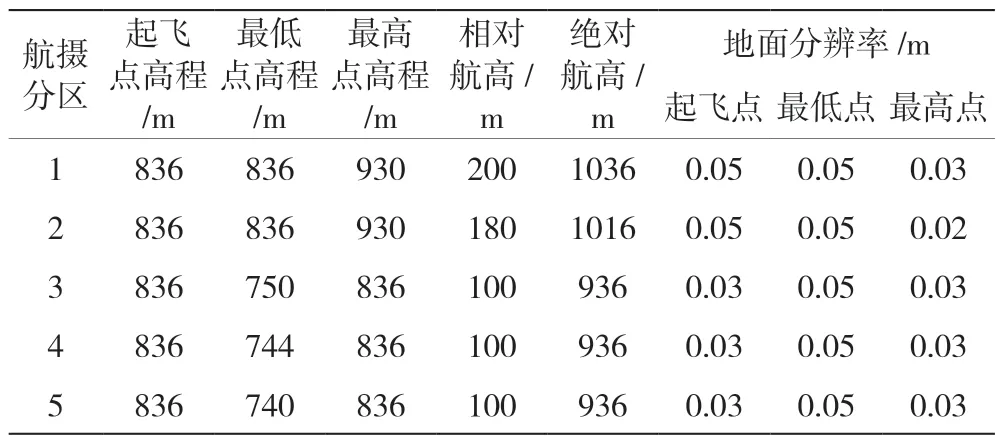
表1 相对航高及地面分辨率
式中:H 为航高,m;f 为镜头焦距,mm;GSD 为地面分辨率,m;a 为像元尺寸,mm。
该项目使用的大疆精灵4 PRO 无人机的自带相机, f=8.8 mm,a=2.41μm。地面分辨率优于0.05 m,因此,航高最大为183 m,根据地形高差及最大航高对该摄区进行分区,共分为5 个分区。
2.2 航摄重叠度
低空数字航空摄影规范[2]中规定航向重叠度一般应为60%~80%;旁向重叠度一般应为15%~60%。由于本测区为峡谷沟道地形,结合项目中的实践经验,航向设计为80%,旁向设计为70%。根据各摄区的地形高差,按照公式“最高点重叠度=重叠度+(1-重叠度)×(基准面-最高点)/相对航高”计算出最高点的最小航向重叠度为70%,旁向重叠度最小为54%,均满足规范要求。见表2。
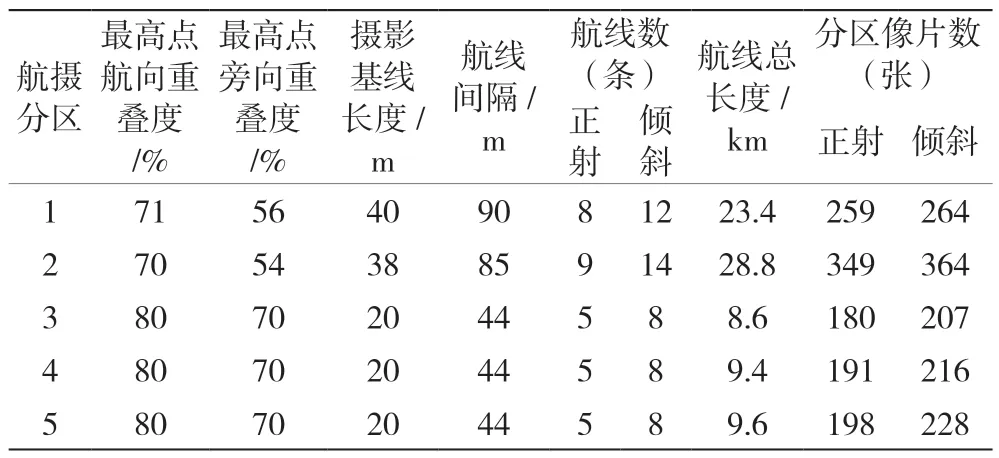
表2 各分区航摄统计表
2.3 像控布设与测量
2.3.1 像控点布设
根据规范要求及航线规划等因素,结合项目生产实际经验,像控点按照航向及旁向300 m 为间距在各交点处布设。测区内共布设像控点20 个(见图1)。

图1 测图范围及像控点布设图
2.3.2 像控点地面标志制作
像控点均在实地制作地面标志,标志以白灰(或白色布条)制作在地面空旷处。形状为“L”形,线条单边长度为0.6 m,宽度为0.2 m,测量的位置为“L”形外角拐点。见图1。
2.3.2 像控点测量
采用RTK 的作业方法按图根级精度进行测量。
2.4 航摄
采用大疆精灵4PRO 无人机(搭载自带相机)获取倾斜和正射影像,采用DJI Pilot 软件系统进行航摄任务规划设计及飞行控制,航摄分为5 个分区,飞行15 个架次(5 个正射方向,10 个倾斜方向,倾斜角度为-60°)。分区1 和2 是在较高分层上对测区范围的整体航摄,相对航高为200 m(分区2 为180 m),可确保土陵沟沟边及以上区域的地面分辨率达到0.05 m 以上,分区3、4、5 作为土陵沟沟边及以下区域的航摄,相对航高为100 m,可确保最低沟心位置的地面分辨率达到0.05 m 以上,见图2。各分区相对航高及地面分辨率见表1。外业航摄完成后统计出各分区的航摄参数,见表2。

图2 分区航摄航迹示意图
3 航摄内业
3.1 空三平差
采用光束法局域网平差方法进行空三计算。使用ContextCapture Master 软件进行内业数据处理,主要包括新建工程、加载影像数据、提交自由网空三解算、加入像控点空三解算并生成空三平差报告。平差后基本定向点水平残差最大点为0.021 m,小于限差±0.15 m;垂直残差最大点为0.014 m,小于限差±0.23 m,均符合规范[3]要求。图3 为分层航摄空三平差3D 视图。

图3 分层航摄空三平差3D 视图
3.2 实景三维模型及正射影像图(DOM)生产
建模处理工作站采用并行GPU 框架硬件。输出的三维模型格式为:3 MX 和OSGB。为提高数据生产速度,可将摄区分割成多个瓦片进行处理。按分块的三维模型制作DOM,每块按4096×4096 像素大小输出DOM 瓦片。输出的DOM格式为TIFF。图4 为三维模型示意图。利用像控点的地面标志在三维模型中对应位置量取到三维坐标,与像控点成果进行比较计算,利用其差值计算出基于像控点的平面位置中误差和高程中误差。见表3。

表3 基于像控点的三维模型精度统计表

图4 三维模型示意图
3.3 地形图编绘
使用CASS10.1 软件加载CASS_3D 模块后,再添加三维模型进行地物信息绘制,高程点数据采集,使用高程点构网生成等高线,基本等高距为1 m。最终进行地形图编辑与整饰。图5 为整饰完成的地形图局部裁剪图。利用75 个实测地形点对地形图图幅等高线高程中误差进行了统计,统计结果为:地形图图幅等高线高程中误差为±0.16 m,满足规范中的限差±0.5 m 要求。

图5 1:500 数字地形图成果
4 结论
文中以公刘教稼苑景区防护工程1∶500 地形图测绘为例,对分层航摄方法进行了阐述,分层航摄的目的是为了确保航测地形图中地面分辨率这一至关重要的因素能够满足规范要求。案例项目中地形复杂,属于峡谷地形。分区1 和2 分别在绝对航高1036 m 和1016 m 的高度层上进行了航摄,两个分区对测区进行了完整的航摄,但沟边及以下区域的地面分辨率已经超过了0.05 m,分区3、4、5 在绝对航高936 m 的高度层上对沟边及以下区域进行了航摄,保证了沟边及以下区域的地面分辨率达到0.05 m。通过5 个分区3 各高度层的航摄,确保了有效地形图测绘范围内的地面点地面分辨率均达到了0.05 m。
航摄内业空三平差后基本定向点水平残差最大点为0.021 m,垂直残差最大点为0.014 m;基于像控点的三维模型平面位置中误差为±0.048 m,高程注记点中误差为±0.045 m;利用RTK 实测地形点统计到地形图图幅等高线高程中误差为±0.16 m。以上精度指标均符合规范要求,表明采用分层航摄方法可以保障峡谷沟道地形图航测精度。