机电一体化在小型三行轮式玉米收获机设计仿真中的应用
2023-12-18任桔
任 桔
(宜兴高等职业技术学校,江苏 无锡 214200)
农业机械设计制造是农业现代化发展的重要支撑,而机电一体化技术的快速发展为农业机械设计制造带来了新的机遇和挑战。“十四五”规划中对农业现代化建设与发展提出了新的要求,即结合超大规模农产品的需求和超大规模人口的现实状况,必须要将现代化科学技术引入其中,解决一些地区自然条件不足的问题。机电一体化技术将机械工程和电气工程相结合,通过智能化控制与信息化技术的应用,实现农业机械的优化设计、自动化操作和智能化管理。基于此,讨论了机电一体化在小型三行轮式玉米收获机设计仿真中的应用,探讨其对农业生产效率提升和农业现代化进程的推动作用。
1 机电一体化在农业机械设计制造中的价值
机电一体化将信息技术、电子技术、传感器技术、信号转换技术等先进的技术结合起来,具有一定的兼容性和普适性,结合农业生产需求和应用状况,用于农业机械设计制造中,提升农业机械的性能和功能,使其更好地适应农业生产的需求。机电一体化在农业机械设计制造中的价值体现在以下几方面。
第一,机电一体化可以实现对农业机械的智能化监控和控制,减少人工操作过程中的安全隐患。例如,通过传感器和控制系统的联动,可以实时监测农机的工作状态和环境参数,及时发现并解决潜在危险[1]。
第二,机电一体化可以通过自动化和智能化的设计,简化农机的操作流程,减轻操作人员的负担,提高工作效率[2]。
第三,机电一体化可以实现远程控制和监控功能,操作人员可以通过远程终端对农机进行操作和监控,提高操作的灵活性和便捷性。
第四,机电一体化可以通过提高农机的工作效率和生产能力,实现农业生产的规模化和自动化。例如,通过机电一体化的设计,可以实现农机的智能化调度和协同作业,提高作业效率和作业质量。
第五,机电一体化还可以提高农机的精准性和稳定性,减少生产过程中的浪费和损失,进一步提升产能[3]。
2 机电一体化在小型三行轮式玉米收获机设计仿真中的应用
2.1 调平机构模型构建
研究液压油缸活塞伸缩长度与竖直方向升降位移的关系,需要在已设计的调平机构基础上建立收获机的机械结构调平模型,并进行分析。为了实现收获机的左右横向调平,要对左前侧、右前侧液压油缸的伸缩长度进行调节,以改变左前轮和右前轮相对于车身上层安装主架的位置。通过控制液压油缸的活塞伸缩长度,可以实现左右轮的高低调节,从而实现收获机的左右横向平衡[4]。
收获机底盘调平装置右半部分的结构与连接关系、以P点为圆点建立的坐标系见图1。图1 中,BP为液压油缸;PJ为下摆臂,在BR伸缩的情况下围绕P点进行旋转;P点为右前轮下摆臂和收获机车身的连接点;B点为右前液压油缸和收获机上底盘架的连接点;R为油气缸和下摆臂的连接点;J为右前轮和下摆臂的连接点,也代表垂直方向上的位移,即收获机车身右前支撑点位置的升降量。同时,在坐标系中可以用ΔZj表示B支撑点的升降量,根据模型可以计算出,液压油缸所需伸缩量ΔRR',通过控制油气缸伸缩量,可实现收获机车身调平。
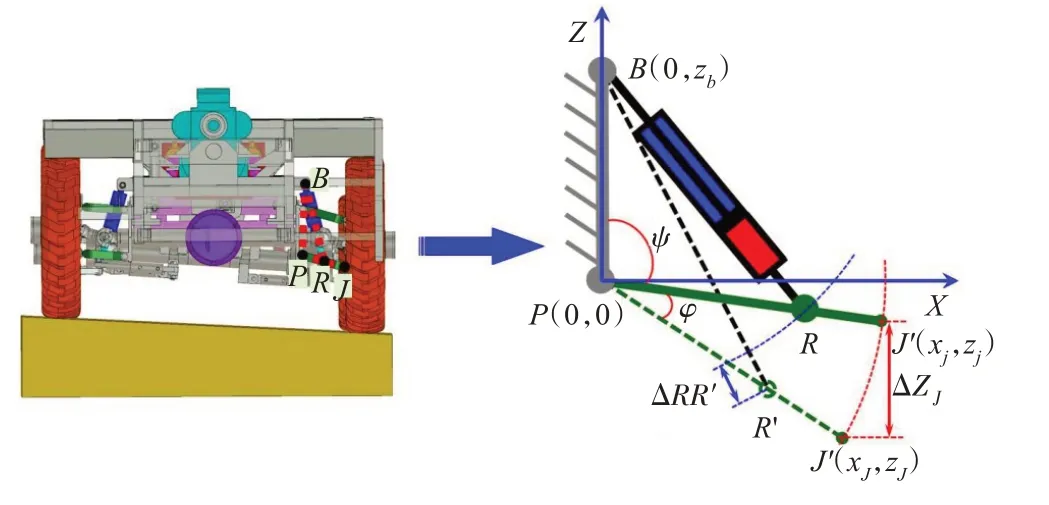
图1 右前侧调平机构示意图Fig.1 Diagram of the right front levelling mechanism
在ΔPBR中,根据余弦定理可以得出:
由公式(1)得出:
PJ'是以P点为中心旋转而来,设置J点坐标为(xj,zj),J'点坐标为(xJ,zJ),其中:
由旋转矩阵式(5)可简化为式(7),具体情况如下:
其中J'在Z轴的方向坐标可以根据J点在Z轴的方向坐标所需升降量获取:
旋转角φ大小为:
根据φ和ψ以及ΔPBR'中PB边长和PR'边长,根据余弦定理可以得出BR'边长,也就是伸缩后油气缸的长度:
根据三点便捷逐低调平模型,获取收获机车身调平各个支撑点所需垂直方向上的位移,再结合位移计算油气缸伸缩长度,由控制器控制油气缸动作完成调平运动。
2.2 悬挂系统设计与建模
尽管收获机车身调平系统可以使收获机实现大长斜坡中连续作业,然而油气缸相对动作较慢,调平时间较长,当遇到田间坑洼不平的地面时,调平系统可能无法快速应对,导致收获机的车轮在调平动作完成之前已经越过凸凹地面。这些无规律的小型凸凹会对驾驶员的驾驶作业产生影响,不仅使机手颠簸并容易疲劳,还会对脱粒清选等作业系统产生一定的影响,降低收获机的作业质量[5]。对此,需要利用集成制造技术,在计算机辅助设计、制造、测试下,实现悬挂系统设计与建模。使用平行四杆机构,实现车身的稳定调平,使收获机在不平地面上保持平稳。同时,油气缸作为调平和减振元件,可以通过控制油气缸的压力和流量来调节左右前轮的位置和减振效果。油气缸通常使用惰性气体作为弹性元件,通过油液作为传力介质来实现减振和车身调平功能。当车辆在轻微波动的路面上行驶时,惰性气体的弹性能起到减振效果。当车辆行驶在倾斜角度较大的坡面时,油液会推动油气缸内的活塞伸缩,实现车身的调平。油气缸结构见图2。
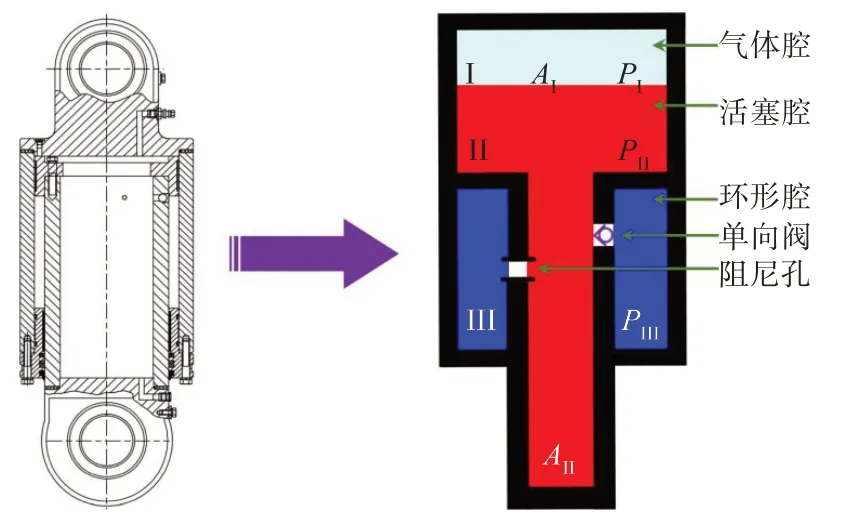
图2 油气缸结构图Fig.2 Cylinder structure drawing
2.3 仿真分析
悬挂系统在收获机田间行驶作业时主要负责小角度的快速微调,旨在提高收获机行驶作业的稳定性。因此,在仿真验证时,主要关注悬挂系统在小角度微调方面的性能表现。通过在AMEsim 中建立收获机的悬挂系统模型,并设置适当的工况和路面条件,可以模拟收获机在田间行驶作业时的实际工况。仿真流程:第一,在AMEsim 中创建一个新的仿真项目,并设置时间和步长参数;第二,在仿真模型中添加收获机的前轮和双后车轮,及悬架系统的相关部件,如前油气悬架和后弹簧阻尼悬架;第三,设置前轮和后车轮的大小为0.05 m,并将激励的持续时间设置为0.1 s;第四,在仿真模型中添加一个激励信号,并将其应用于前轮和双后车轮,设置激励信号的开始时间为第4 s;第五,运行仿真,并观察收获机车轮和悬架的位移和速度情况。可以使用AMEsim 提供的图形工具和结果分析功能来查看和分析仿真结果。收获机前后轮胎的位移和速度见图3。

图3 收获机前后轮胎的位移和速度Fig.3 The displacement and speed of the front and rear tires of the harvester
3 结语
以小型三行轮式玉米收获机设计制造为例,探究了机电一体化的具体应用,通过数学模型,设计收获机调平机构和悬挂系统,在减振方面,于收获机前端设置了独立性油气悬挂,后端设置非独立性弹簧阻尼悬架[6]。总之,机电一体化在小型三行轮式玉米收获机设计仿真中的应用给农业生产带来了变革和发展的机遇。小型三行轮式玉米收获机是一种机电一体化的农业机械设备,它将机械结构、电子控制和传感器技术相结合,实现自动化操作和高效的玉米收获,提高农业机械的智能化水平,推动农业现代化的进程。