基于深度学习理论雷达图像中对流云区识别算法的研究
2023-12-18王新舒韩旭日
闫 军, 王新舒, 韩旭日
(内蒙古自治区气象科学研究所, 内蒙古 呼和浩特 010051)
0 引 言
雷暴等强对流天气是世界公认的严重威胁航空器飞行安全的天气系统,该类系统所产生的风切变、强降水、冰雹等天气现象是造成飞行事故的直接原因。因此,一直以来强对流都是航空气象的研究重点,同时也是难点。一方面,针对高频次发生的强对流天气,国内外学者虽然已经进行了长期的研究,但是对其形成演变的机理认知十分有限,系统的复杂性使得诸多问题依然没有被解决;另一方面,社会及行业重点领域对该项业务服务的要求越来越高,预报预警的准确率、时空分辨率、时效性需求极高,航空安全在其中尤为突出。因此,如何利用新的技术方法快速、准确地获取强对流天气影响范围、精度及程度是临近预报业务的研究热点,得到的研究成果在航空气象勤务中能发挥有效作用[1]。
层状云与对流云自动识别算法的研究一直是天气雷达应用研究领域的热点,并且已经产生了一批切实可行的成果。识别算法主要分为背景场阈值技术(BET)和概率匹配方法两大类。D.D.Churchill 等人在雷达反射率数据基础上使用BET 方法,该方法集中在核的识别上,为每一个已识别核施加一个固定的影响半径,以此确定对流云区域[2]。M.Steiner 等人认为文献[2]所使用的固定影响半径依据是不充分的,他们将影响半径作为变量,它是背景场平均反射率的函数,设定的门限阈值取决于背景场平均反射率,该算法已被TRMM(the Tropical Rainfall Measuring Mission)项目采纳为降水分类的业务运行算法[3]。DeMot 等人将上述方法扩展到三维,通过使用采自双极化雷达的垂直速度,证明了三维分析改进了降水分类的精度[4]。Houze 等人也将他们的研究建立在三维分析的基础上,但不同于其他的BET 方法,他们将重点放在通过窗区概率匹配方法来改进降水估测,将层状云和对流云不同降水增长机制的影响与雷达数据固有的限制相结合,由3 个参数代表降水分割结果:径向反射率梯度、亮带小数、有效性(测量云的深度)[5]。国内从事这一领域研究的人员相对较少。王改利在Lakshmanan 的对雷暴识别聚类分析方法基础上提出一种K-means 方法,该方法基于K-means 的分层聚类能够实现暴雨回波的多尺度识别。肖艳姣选取了组合反射率及其水平梯度、反射率因子等于35 dBZ 的回波顶高及其水平梯度、垂直累积液态水含量及其密度等6 个候选参数,并统计这6 个候选识别参数分布的概率密度特征,利用模糊逻辑法进行层状云和对流云的识别[6-7]。
本研究是在充分汲取前人成果的基础上,尝试使用深度学习方法来试验对流云区和层状云区的识别[8-10]。深度学习的技术理论已经在多个领域展示出较高的应用价值,并且不断在计算机视觉、自然语言处理、自动驾驶等多个方面取得重大突破。其算法模型的建立依赖大量的样本数据,天气雷达具备数量庞大的高时空分辨率观测数据,这就为将深度学习理论引入天气系统识别和预测提供了可能。在众多的机器学习研究方向中,表征学习的重点是如何自动找出表示数据的合适方式,以便能更好地将输入变换为输出;而本研究所采用的深度学习理论是具有多级表示的表征学方法,它可以逐级表示越来越抽象的概念或模型。在该模型的框架下,构建数据集合和特征标签,以此来训练端到端的多层神经网络,雷达数据中的对流云区可以逐级表征为特定的位置和角度的边缘,即通过具备一定模型深度的多个隐藏层的神经网络,逐层组合特征非线性变换,将原始特征映射到高维度的特征空间,从而语义分割出对流云区。
1 数 据
训练、验证和测试数据集的建立采用呼和浩特新一代天气雷达2015—2022 年(呼和浩特C 波段HHHTRC)基数据,该雷达馈源海拔高度为2 062 m,预警业务观测使用VCP21 模式(9 层立体扫描),数据流间隔6 min,数据库长为250 m。雷达站所处位置净空条件良好,无明显遮挡及干扰源,数据质量较高。
1.1 数据预处理
1) 依据雷达观测记录挑选出较为显著的对流性天气过程的基数据;
2) 由于雷达基数据获取过程中使用的是径向极坐标采集和存储的方式,加之地球曲面的变化,需要对数据做等距保角投影转换,使之投影到与地球相平行的平面上[6]。因此,需要将极坐标系数据通过坐标变换的方式转换成地理经纬坐标系三维数据场,坐标转换公式为:
式中:λ0、φ0为雷达天线所在位置的经纬度;λ、φ为目标物的经纬度;L为目标物到天线之间的距离;R为等效地球半径;h为天线到达地面的高度;H为回波所在高度。
3) 原始基数据是沿雷达扫描线径向分布的,为保持探测数据的连续性,相邻扫描线之间和相邻扫描层之间存在数据点,需要填充以免造成信息的缺失。本文采用四线插值算法,该算法在确定扫描盲区的一个空间点物理量数值时需4 条雷达扫描线上的8 个极坐标点。其算法为:将坐标系中的空间某一数据点(xn,yn,zn),通过公式转换到极坐标系中去,设它在极坐标系中的相应位置为(Ri,θj,φk),对其取整数,从而获得与它靠近的8 个极坐标数据点(Ri1,θj1,φk1)、(Ri2,θj1,φk1)、(Ri1,θj2,φk1)、(Ri2,θj2,φk1)、(Ri1,θj1,φk2)、(Ri2,θj1,φk2)、(Ri1,θj2,φk2)、(Ri2,θj2,φk2)。所对应的回波数据如图1 所示。
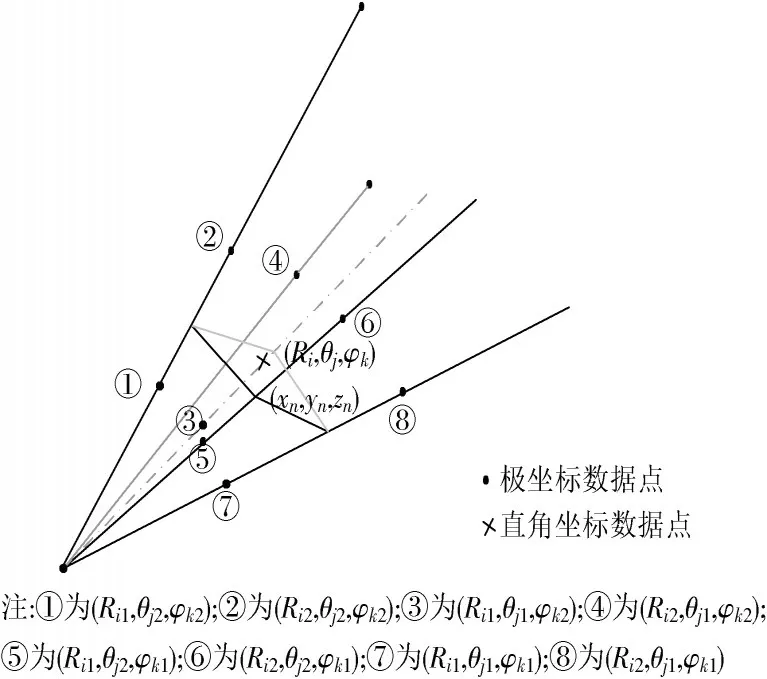
图1 本研究逻辑结构
根据(Ri,θj,φk)与相邻8 个数据点的距离远近,对回波数据进行四线性插值,得出(Ri,θj,φk)点上的数据,这也就是(xn,yn,zn)上的数据;最后,综合雷达数据和深度学习算法的可行性,将经上述处理后雷达数据场数据转化为垂直最大回波强度显示分析产品(CR)建立模型数据集,CR 产品利用数据场强度数据,在以1 km×1 km(或2 km×2 km)为底面积的数据点垂直向上到回波顶的垂直柱体中,对所有位于该柱体中的回波强度数据点进行比较,挑选出最大回波强度。再用测高公式计算最大回波强度的所有高度,从而得到最大回波强度分布图像。这种产品有助于用户快速查看最大回波强度的分布,对有些突发性的强对流天气,其初始回波往往出现在中空,用户使用这种产品可以有效监测这一类的强对流天气,在稳定性降水条件下,还有助于用户识别0 ℃层亮带。由于在降雹区域,相应的中空可能存在水分累积区,所以CR 产品还可以作为监测冰雹的发生发展的工具之一。
1.2 数据集构建
主要选取呼和浩特雷达站汛期(5 月—10 月)预警区域内所发生的强对流天气过程的探测基数据,经预处理后组成算法数据集,其中231 个数据样本作为训练集,69 个数据样本作为验证集,85 个数据样本作为测试集,比例设置为3∶1∶1。数据集的时间跨度为2015—2022 年,其中2022 年的数据作为测试集样本,在实验过程中2022 年的样本不参与模型训练和调参,这有利于客观地验证模型的泛化和迁移能力以及识别效果,如表1 所示。
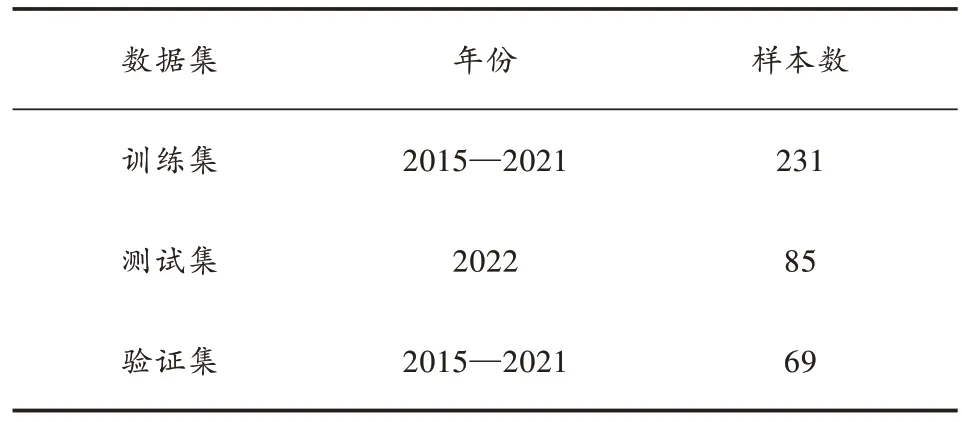
表1 数据集详细信息
2 模 型
基于雷达强度数据对流云区识别算法模型的建立可以充分借鉴计算机视觉中图像语义分割的理论,后者着重像素级的图像目标识别,即通过算法标注出每个像素所属的对象类别,而对流云区的识别实质上是通过强度数据点的识别划分出不同目标区域。
鉴于雷达数据量的原因,模型设计之初应该考虑到在此种分割场景下算法要足够轻量。一般的分割模型网络结构通常:输出是一个N×H×W的概率图,其中N是一个向量,向量的维数代表类别的数量,即向量的每个元素对应一个类别,而这个元素的数值是概率值,表示对应识别类别的概率,给出每一个数值点类别,所以H×W大小要与原数据场保持一致。分割网络实质上是一个没有全连接层的全卷积网络,该类型网络结构可以分为Encoder 和Decoder 两个部分。Encoder 部分特征图的长宽会逐步缩小,需要下采样;Decoder 部分特征图的长宽会逐步增大,需要上采样。
一个切实可行的分割网络需要解决如下问题:
1) 通过尽可能少的Encoder 层数获得较大的感受野。所谓感受野是指输出的二维数据场上每个点的数值,是由输入二维数据场上大小为kh×kw的区域的元素与卷积核每个元素相乘再相加得到的,所以输入数据场区域内每个元素数值的改变都会影响输出点的像素值,将这个区域叫作输出数据场上对应点的感受野。感受野的大小是评价分割网络的特征表示能力的重要指标之一。
2) 下采样过程中虽然得到了高阶特征,但其长和宽在不断缩小,如果直接作为上采样输入,则会丢失信息。解决这一问题的方法就是通过跳跃连接,使得上采样过程不仅使用高阶特征,也可以使用同维度的低阶特征。
3) 多尺度问题。在雷达探测资料中,对流性云区目标有大有小,如何保证不同尺度的目标均能被很好的处理呢?解决的方式是不同尺度的目标交给不同感受野的卷积层来处理。
本研究借鉴分割理论在生物医学领域的应用成果,其中U-Net 网络是采用编码器(下采样)-解码器(上采样)结构和跳跃连接的一种设计方法,也是比较基础的方法,后续的许多卷积神经网络仍延续了该算法的核心思想。U-Net 网络如图2 所示,其基本特点是使用全卷积网络(FCN)。它与卷积神经网络(CNN)的区别在于将CNN 最后的全连接层(FC)替换为卷积层(Conv),因此该网络是一个端到端的网络;网络的Contracting path(如 图2 左 侧)使 用Conv 和MaxPooling;网 络 的Expansive path(如图2 右侧)使用上采样(upsampling)与左侧的Contracting path、poolingde featuremap 相结合,然后逐层上采样到heatmap;最后经过两次Conv,达到最终的heatmap,再用1×1 的Conv 做分类。
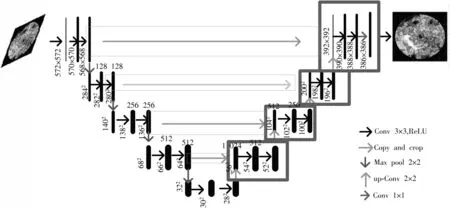
图2 U-Net 网络结构图
3 实 验
对流云和层状云无论从外部形态还是内部机理都存在很大的区别:对流云是由大气层结构不稳定引起的气流垂直运动所致,在雷达探测分析产品中对流性降水表现为较高的反射率数值,云体水平反射率梯度较大,云区形态分布面积较小,较大的垂直厚度,云顶部不平整,云顶高度梯度大;层状云在雷达探测分析产品中所反映的反射率强度相对较弱,分布较为均匀,水平反射率梯度较小,其外部形态表现为云区分布面积较大,比较薄的垂直厚度, 顶部比较平整, 云顶高度梯度不大,常出现零度层亮带等特征。根据上述云体特征与模型技术要求进行算法实验。
3.1 实验方案
整个模型网络有23 层卷积层,其中左侧为收缩网络,右侧是扩张网络。收缩网络由多组卷积神经网络组成,每组由两层 3×3 unpadded 卷积层组成,每个卷积层后使用ReLU。每组之间使用size=2、stride=2 的最大池化进行下采样。每组第一次卷积时,将特征图通道数增加1 倍。扩张网络也是由多组卷积层组成,每组先使用2×2 的up-convolution(转置卷积)将分辨率翻倍且通道数减半,然后在与收缩网络中对应的层,输出特征结果concatenation。但是因为U-Net 全部使用unpadded 卷积,对应的收缩网络的特征图的分辨率更高。由于算法实验中采用了Overlap-tile 策略,可以将收缩网络对应的特征结果四周裁剪后,再拼接到扩张网络特征图中,拼接后接两个unpadde 的3×3 卷积层,每个卷积后接ReLU,扩张网络的最后一层是1×1 卷积层,将通道数转换为类别数。
3.2 训练与调参
为了减小开销,U-Net 网络在训练参数上将batch size 设置为1,所使用的SGD 的动量系数为0.99。加权损失部分最后一层使用逐强度点的softmax 和交叉熵损失,公式如下:
式中:ak(X)是二维数据场中数据点的位置X处通道k的激活值;K是通道总数(也就是类别数);ℓ∈{1 ,2,…,K},表示每一个数据点的类别;ω(X)是X数据点的损失权重。
实验过程中还涉及数据增强,这是由于样本数量相对较少,采用的方法是使用3×3 组网格上的随机唯一向量生成平滑形变。
3.3 评价指标
算法模型把对流云区识别分割后,需要将模型预测的结果与人工标注的验证标签进行比对,来衡量分割算法的优劣。本研究采用该领域通用的评价指标:准确率(Accuracy)、召回率(Recall)、Dice 系数。
准确率(Accuracy)为在雷达分析产品强度数据总数中被正确分类的数据点数,该指标通常被用来衡量图像分类网络模型对像素分类的性能;召回率(Recall)是真实类别为对流云区的数据点被网络模型正确分类的概率;Dice 系数通常在医学图像分割领域用作评价指标,该指标用于对网络模型预测值与真实标注的相似度进行评估。Dice 系数取值范围为[0,1],其评估的分值越高,说明该模型的分割效果越好,用于本研究则表示算法识别结果与真实标注越接近。准确率(Accuracy)、召回率(Recall)、Dice 系数计算公式分别为:
式中:TP 为测试集中对流云区真实的数据点总数(被标记为对流云区的数据点,并被正确预测为对流云区的数据点);TN 为测试集中非对流云区的数据点总数(被标记为非对流云区的数据点,并被正确预测为非对流云区的数据点);FP 为测试集中对流云区真实的数据点总数(被标记为非对流云区的数据点,但被预测为对流云区的数据点);FN 为测试集中对流云区真实的数据点总数(被标记为对流云区的数据点,但被预测为非对流云区的数据点)[10-11]。
3.4 实验结果
对实验的测试结果采用上述评价指标进行计算,最终统计评价指标,如表2 所示。由表2 可知:准确率平均值为76.63%,最高值为82.02%;召回率与准确率相近,分别为76.34%和81.89%。
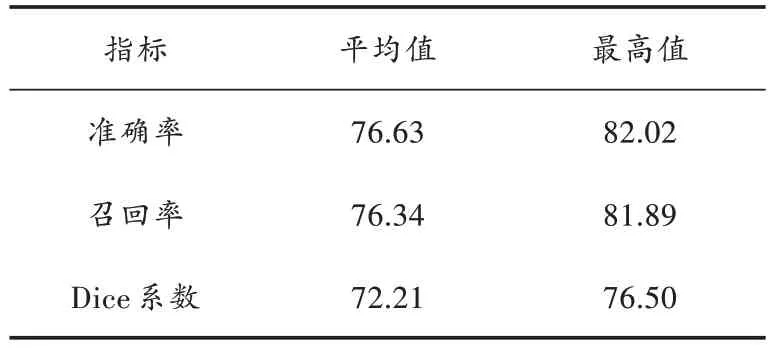
表2 实验结果统计 %
Dice 系数则反映出一个分割效果较好的数值,从图中总体识别效果看:
1) 算法能够准确地识别并分割出对流云区域,特别是相对面积较大的区域(如图3a)所示);
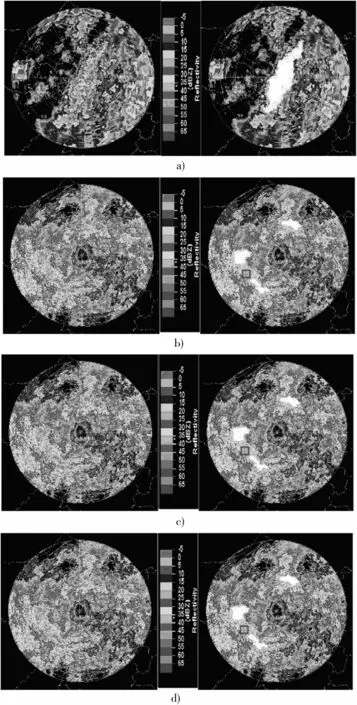
图3 识别结果
2) 对于正在发展,强度不是很强的对流性云区域识别率不高,未能识别出整个大的区域,将整片区域分割为若干区域(如图3b)所示);
3) 尽管大的区域捕捉较为准确,但区域的边缘识别不够精准,边缘识别结果较为粗糙;
4) 面积小的对流性云区域识别度较低,这与雷达数据本身存在噪声点、杂波及地物干扰项有关(如图3c)、图3d)方框区域所示)。图中,白色区域为识别出新一代天气雷达对流云区大致位置。
4 结 论
本文尝试将卷积神经网络模型用于天气雷达探测特征天气系统领域,解决对流云区域的识别及分割问题。在数据集的建立过程中用到了坐标转换、四线插值和组合反射率等算法,并建立了U-Net 网络架构的算法模型。经过训练和调参的实验过程,从而找到识别效果最佳的模型网络组成。最后利用准确率、召回率和Dice系数等评价指标建立识别分割效果的统计数值支撑。从研究成果看,总体达到了设计之初的实验效果;但从识别结果中也发现了诸多问题,在后续的研究中仍有较大的提升空间。