旱地移栽机械取苗机构发展现状与趋势
2023-12-16黄鸣辉汤庆宋哲文刘浩吴洋朱庭伟
黄鸣辉,汤庆,,宋哲文,刘浩,吴洋,朱庭伟
(1.国机重工集团常林有限公司,江苏常州,213000;2.农业农村部南京农业机械化研究所,江苏南京,210014)
0 引言
旱地移栽作业属于劳动密集型,涉及大量的人工劳动和手工操作[1-2]。人工移栽劳动强度大,成本高,耗时,而且相对于机器移栽均匀性差[3-6]。特别是番茄、茄子和辣椒等蔬菜移栽对株距、深度要求高,机器移栽是必然的选择[7]。移栽机替代人工实现作物移栽具有以下作用[8]:(1)开沟至所需深度;(2)获得适宜株距;(3)将秧苗垂直栽植在沟或穴中;(4)用足够的土壤覆盖秧苗,并将秧苗周围的土壤压实。移栽替代直播可以增加作物产量,因为作物在田间的生长期短减少灌溉用水,减少了对肥料、病虫控制化学品、除草剂和种植的需求[9]。传统机械移栽往往需要人工取苗、投苗,移栽效率取决于取苗、送苗的时间,因为需要人工喂苗操作导致效率低[10]。
从20 世纪60 年代开始,移栽自动化的需求越来越突 出[11]。HUANG 等[12]和KUIKEN 等[13]最开始研究育苗移栽,并用大的压缩泥块和一组刀来切成独立的幼苗用于机械移栽。自动移栽过程准确、精确和有效,可以获得高的栽植质量和均匀性[10]。全自动移栽机包括取苗、送苗、栽苗三个过程,取苗是移栽的第一步,也是最重要的一步,取苗质量直接影响最终的秧苗栽植质量。秧苗自动取苗机构是自动移栽机的重要组成部分,用于从秧盘中取苗,并将秧苗放置于种植机构上或直接投到沟中[14],全程由机构完成,不需要人工参与。
不同的取苗机构适应不同的秧苗以及不同的场景需求,本文总结归纳了6 种典型取苗机构,并比较分析了每种取苗机构的优缺点,提出了取苗机构的研究发展趋势和前景,对于全自动移栽机的设计研发提供参考。
1 典型取苗机构
1.1 连杆式取苗机构
连杆传动机构是用铰链、滑道方式,将构件相互连接成的机构,用以实现运动变换和传递动力。采用连杆结构的取苗机构可以实现需要的取苗路径曲线。连杆机构相对简单,早期的取苗机构大多采用四连杆曲柄摇杆机构[15]。许多学者都对这种结构进行了研究,ERDMAN 等[16]指出,单自由度机构是最常用的形式。NORTON[17]指出,四杆机构应该是首先解决运动控制问题的方法之一。PAUL[18]提出用Newton-Raphson方法求解四杆机构位置问题的非线性方程组。他指出,如果其中一个连杆的长度大于其他3 个连杆的长度之和,四杆机构在物理上是不可能的。HIRSCHHORN[19]指出,在四杆机构中,可以通过反转获得不同类型的机构。CHOI 等[20]开发了一个由固定滑槽、主动杆、从动杆、连接杆和滑块组成的五连杆取苗机构(图1),用于驱动针式取苗头将白菜苗从高密度盘(200 株/盘)移栽到低密度盘中。试验测试显示,取苗速度超过30 株/min,合格率达到97%。洋马蔬菜移栽机取苗机构采用的是滑块固定槽式机构[14]。徐丽明等[21]采用四杆式实现取苗运动,如图2 所示。将幼苗图形固定在四杆机构中,然后将曲柄AB 绕点A 旋转,驱动取苗针插入钵苗来拾取幼苗。当幼苗输送到导苗管上方时,排苗杆动作取下幼苗放入导苗管中。
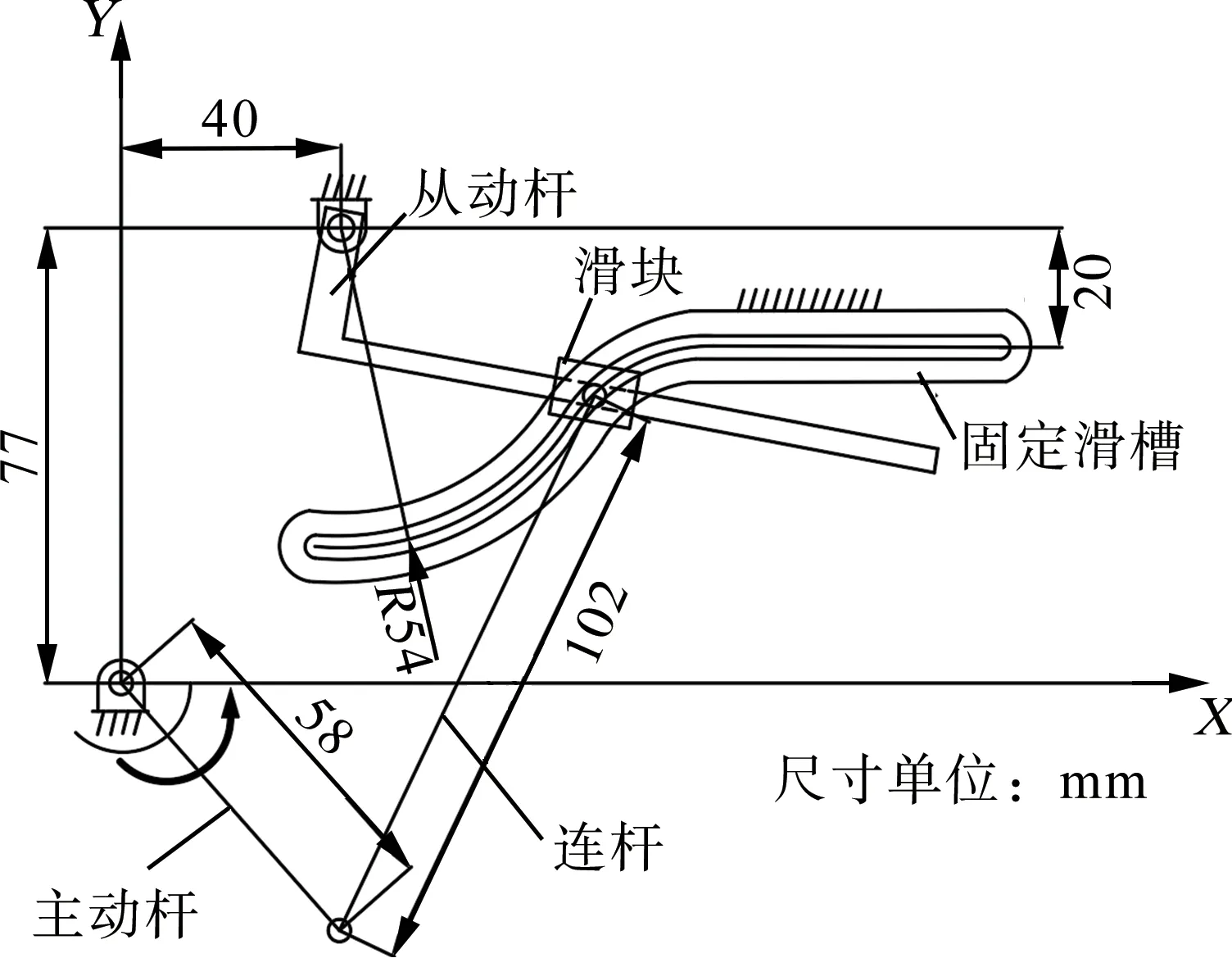
图1 五连杆取苗机构Figure 1 Five–bar seedling pick-up mechanism
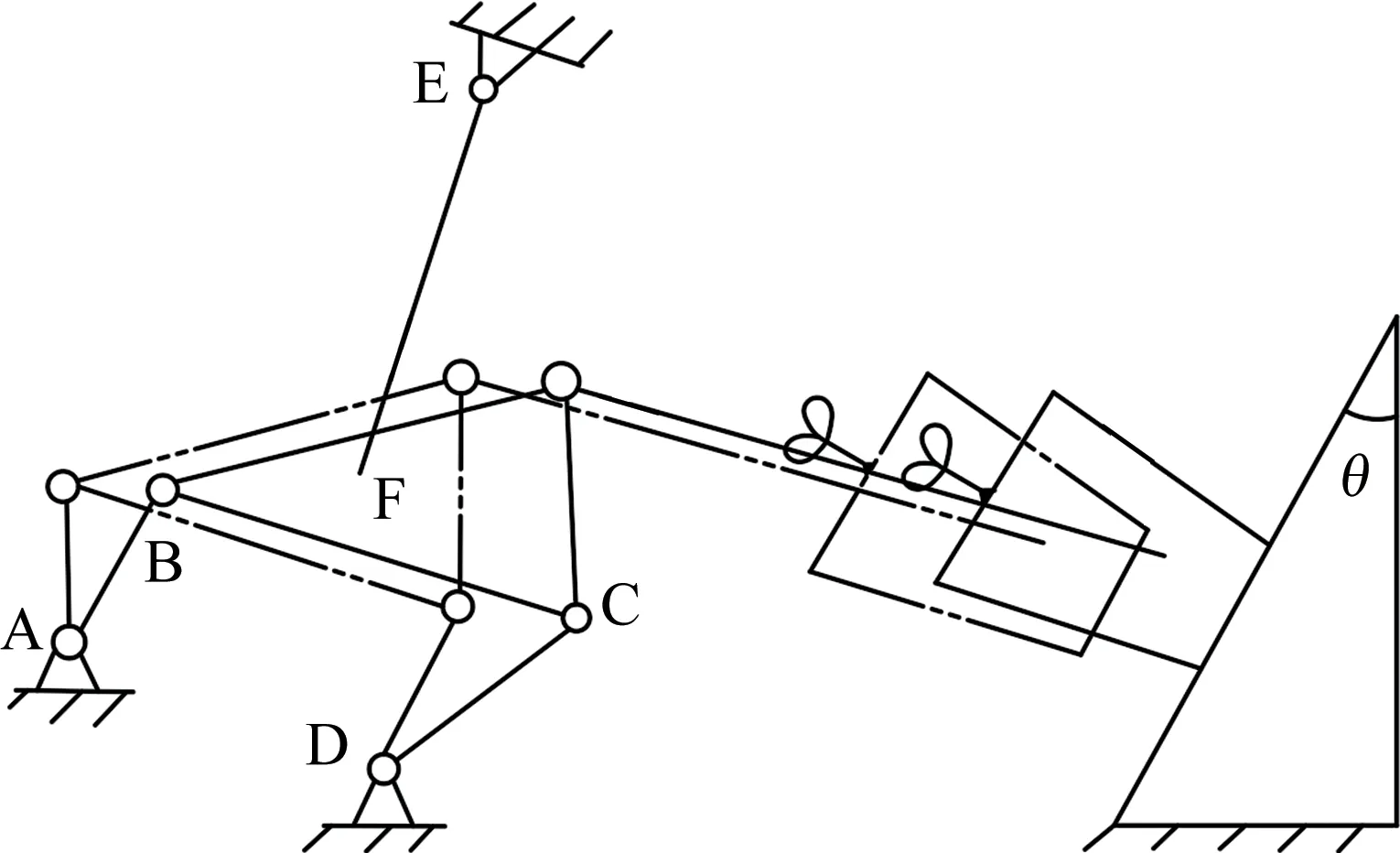
图2 四连杆取苗机构Figure 2 Four–bar seedling pick-up mechanism
丁文芹等[22]结合凸轮、滑槽、齿轮以及连杆开发了滑槽凸轮式取苗机构,如图3 所示。

图3 滑槽凸轮式取苗机构Fig.3 Chute-cam seedling pick-up mechanism
行星齿轮Ⅰ分别与中心齿轮、行星齿轮Ⅱ连线的夹角为α,行星轮轴与行星架之间的相位角为β。此外,幼苗夹持器通过连杆固定在行星轮轴上。
在工作中,行星架作为一个驱动连杆绕着中心齿轮的中心旋转,而行星齿轮4 相反方向两倍速度旋转,即ω2=-2ωH。同时,通过辊子在滑槽中滑动,实现了取苗器的姿态。
1.2 行星齿轮系取苗机构
杆式机构由于占用空间大以及稳定性问题,推广受到限制,行星齿轮箱提供了良好的重复性,并在较小的空间提供了较高的减速比[23],能够更好地实现取苗运动。在行星齿轮系统中,如图4 所示[24],固定在行星非圆齿轮组成的行星齿轮系中的一对取苗臂绕中心轴O 旋转,同时行星架H 相对于行星架以不均匀的速度间歇旋转。由于这两个动作的共同作用,取苗臂尖点P 运动轨迹如图4 所示。通过结构参数优化,可以得到取苗臂最优轨迹[25]。
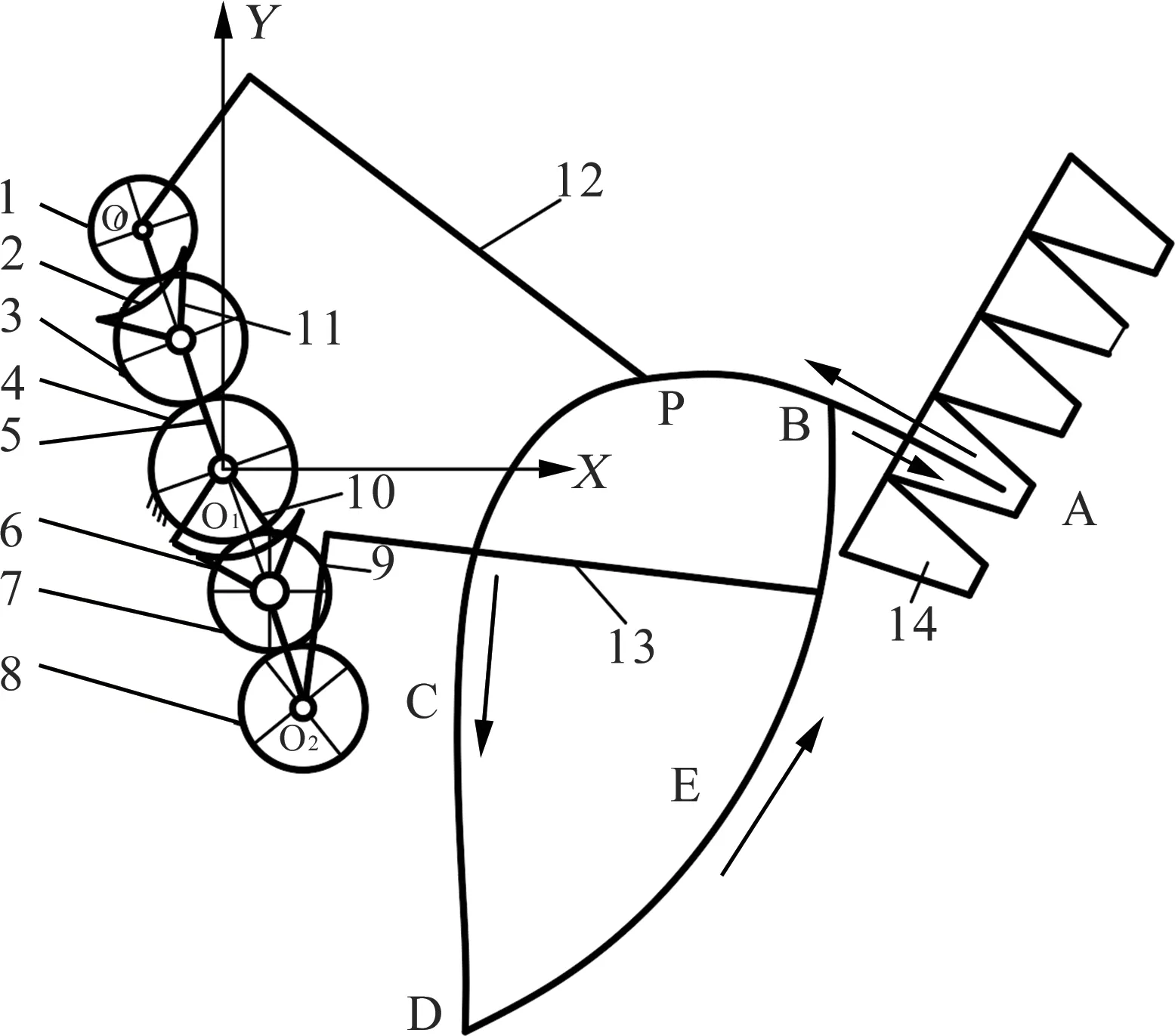
图4 行星齿轮系取苗机构Figure 4 Planetary gear seedling pick-up mechanism
赵雄等[26]开发了连续传动的二阶自由非圆齿轮行星轮系取苗机构,以实现取苗爪周期性二次不等幅摆动规律。利用曲线拟合方法构建自由传动比函数,建立机构不等速传动的数学模型。如图5 所示,机构运动中假定行星架作顺时针匀速转动,太阳轮固定不动,行星轮节曲线与太阳轮节曲线相同。太阳轮与中间轮、中间轮与行星轮齿轮啮合,中间轮与中间轮轴固接,中间轮轴与行星架铰接,取苗爪与行星轮通过行星轮轴固定连接成一体。取苗爪端点的取苗轨迹如图6所示。ZUO 等[27]为保证玉米高产稳产推广玉米移栽技术,开发了非圆齿轮取苗机构,建立了运动学数学模型。通过计算机辅助分析优化软件优化非圆齿轮的节曲线和结构参数。蒋兰等[28]采用椭圆齿轮行星轮系分插机构对油菜毯状苗进行取苗移栽。
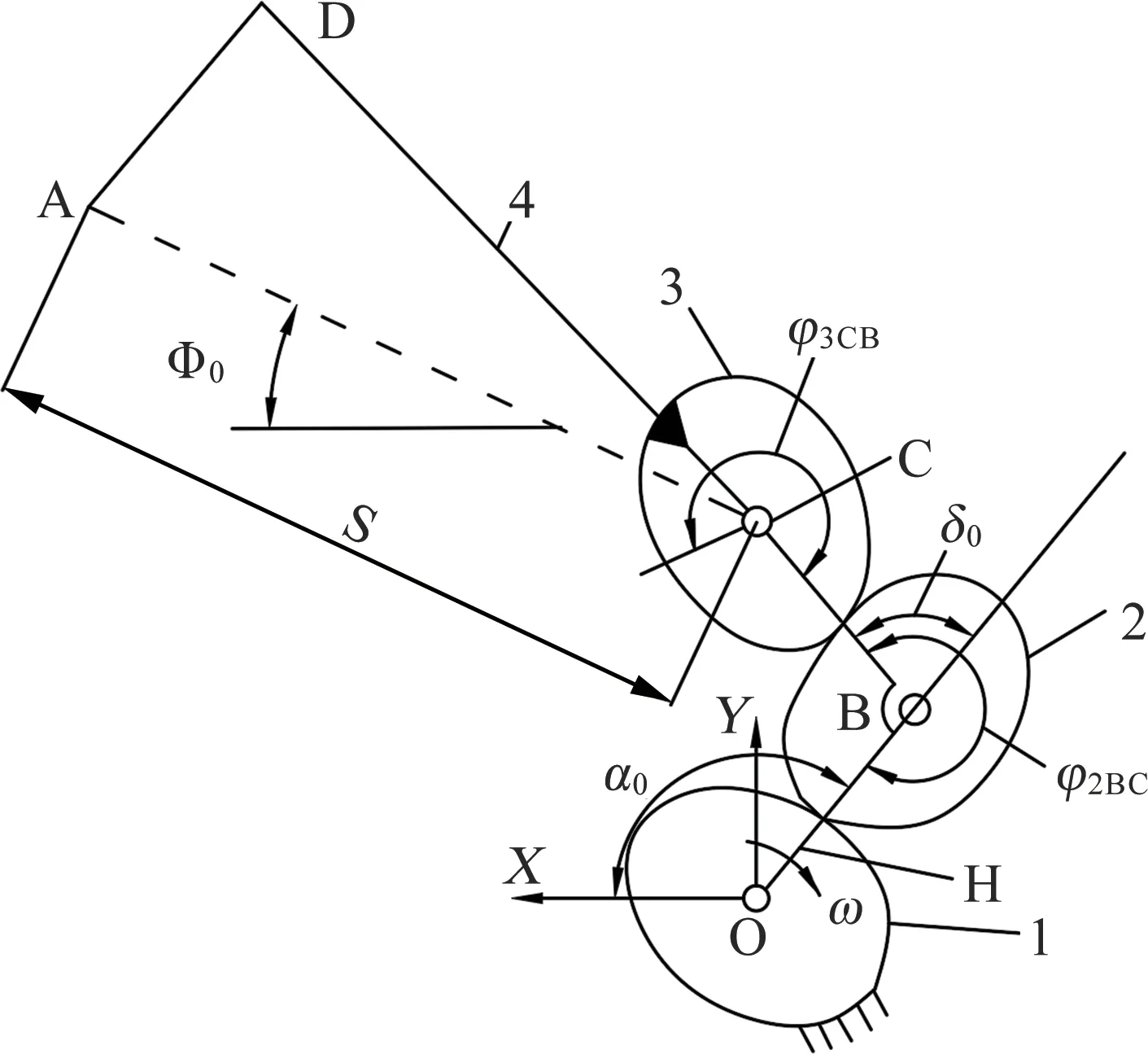
图5 取苗机构初始位置图Figure 5 Initial position of seedling pick-up mechanism
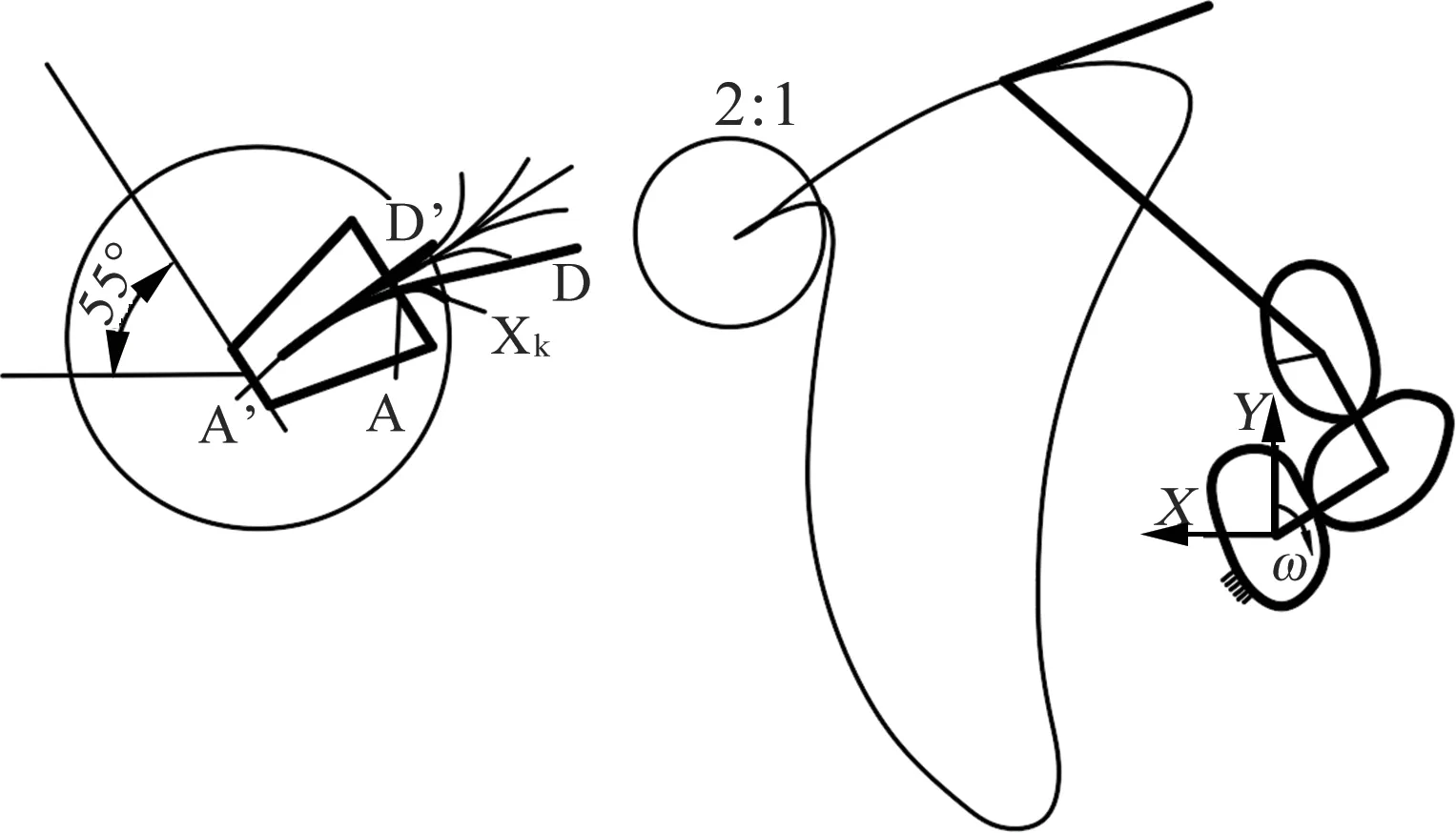
图6 取苗机构轨迹图Figure 6 Trajectory of seedling pick-up mechanism
1.3 气动式取苗机构
气动技术的发展,使取苗机构自动化成为了可能。通过气动技术的应用,促进了取苗机构的发展。气动技术的应用简化了取苗机构,节省了空间。通过气动装置驱动取苗执行器来完成取苗过程。LUAN 等[29]采用气动技术开发了一种黄瓜和番茄幼苗的取苗机构,能够连续完成取苗、送苗,移栽效率达到40 株/min。SYLVESTER 等[30]发明了一种移栽机,它由移栽头、气动机械连杆、托架和计算机控制器组成。张诗等[31]开发了一种气动式取苗机械手,如图7 所示。
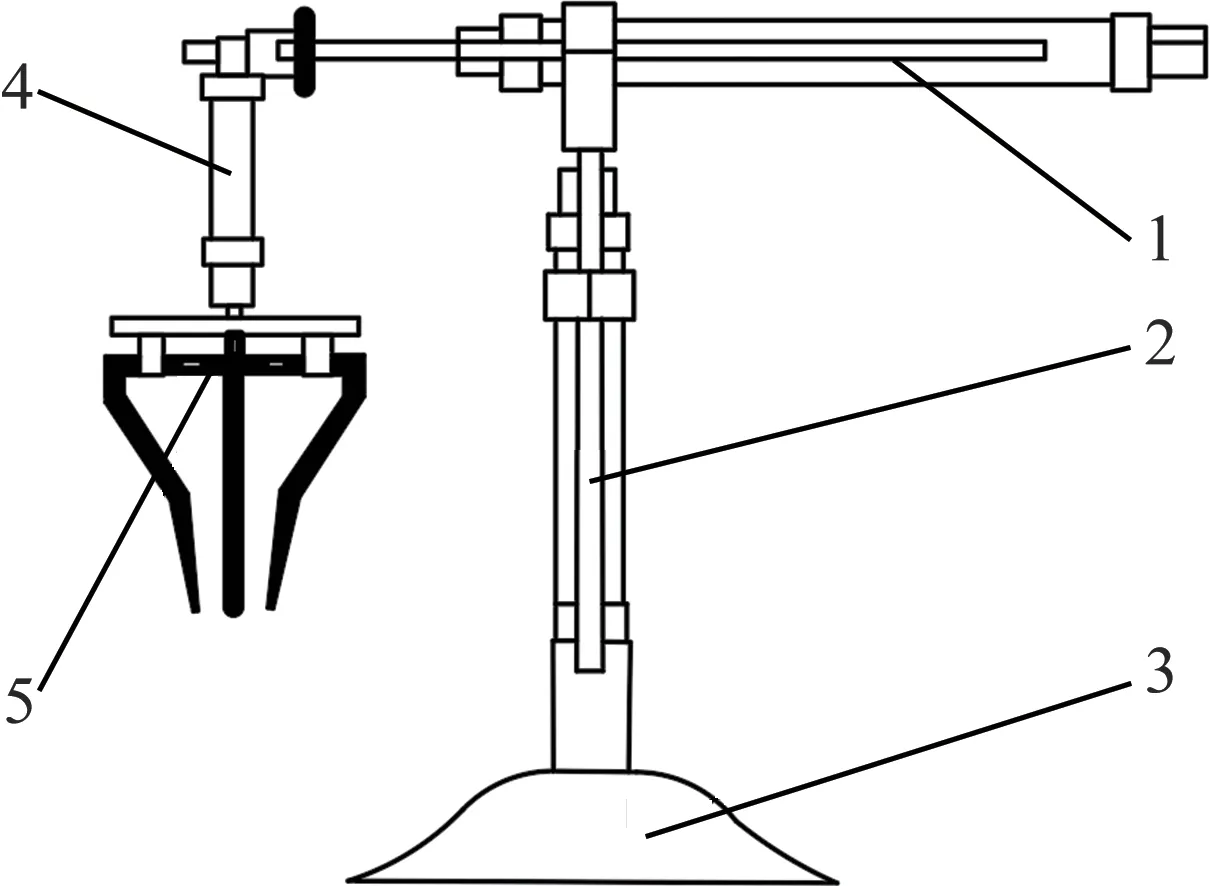
图7 气动取苗机构Figure 7 Pneumatic seedling pick-up mechanism
它主要由水平缸,提升缸,下部底座,夹紧缸和末端执行器组成。机械手由缸驱动,缸由PLC 的电磁阀控制。此外,在机械手的下方,用于苗盘运输的传送带有两条。它们的功能是与机械手一起移栽盆栽秧苗。在工作过程中,PLC 的移动样本可以到达操纵器的托盘的准确位置,然后在夹紧缸的作用下,操纵器的末端执行器完成抓紧和放松的运动。同时,开发了盆栽秧苗的精确钳夹和卸料。此外,在ADAMS 的应用下,研究人员分析了合成运动轨迹的运动学仿真,然后确定了气缸的速度和机械手的合理性。RYU 等[32]开发了一种气动取苗机构。利用机器视觉技术,判断叶片方向信息,取苗指根据幼苗的叶片方向旋转并向下移动到秧苗上方,通过气缸使取苗指夹住幼苗的根部,并将其从秧盘中拉出,移栽效率30 株/min。TIAN 等[33]介绍了一种简单实用花卉全自动移栽机,采用气动技术控制机械手取苗。
1.4 顶杆式取苗机构
为了适应顶出式取苗,对应育秧盘底部需要有孔,SUGGS 等[9]采用针形取苗器进行取苗,取苗器不动,当取苗器移动到秧苗上方,通过秧盘底部顶杆将秧苗推出,正好推向针形取苗器,使取苗器进入秧苗基质块完成取苗,过程如图8 所示。取苗效率可以达到180株/min,但在取苗过程中损失了一些根系土壤,导致在取苗过程中幼苗掉落。
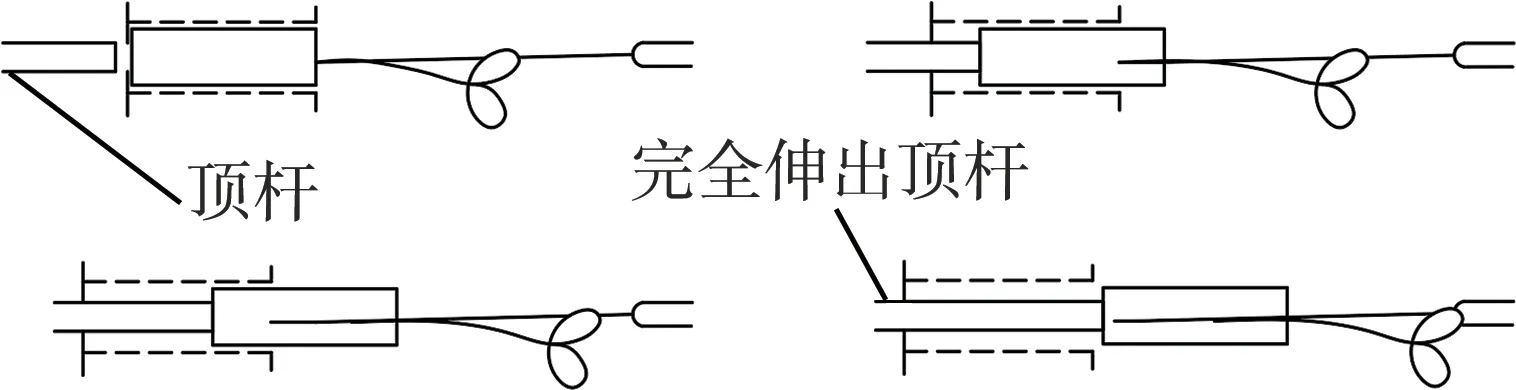
图8 顶杆推出秧苗过程Figure 8 Process of pushing out seedling by top pole
李建桥等[34]开发了顶杆式取苗机构(图9)。其工作原理是秧苗推动机构的推杆从孔进入秧盘的底部,将育秧盘中的秧苗推出,将幼苗移至所需位置。
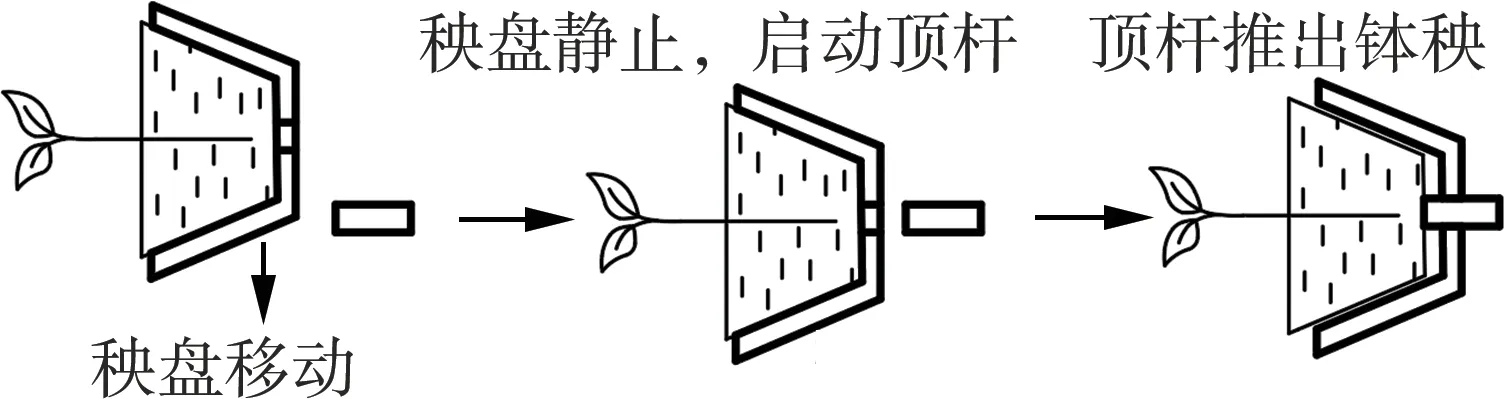
图9 顶杆顶出苗示意图Figure 9 Schematic diagram of jacking out
在此过程中,平移了托盘,可以推出几盆苗。该装置结合气动系统和机械系统,自动化程度高,工作稳定,提高了蔬菜自动移栽机的移栽效率。该研究可用于避免幼苗茎的损伤。徐玉娟等[35]开发了油菜钵苗移栽机顶杆式取苗机构,采用凸轮机构执行顶苗动作,顶苗频率为70 株/min,取苗成功率达到95%。
1.5 夹取式取苗机构
YAMANOBE 等[36]提出了一种有效的利用平行颚式抓取器对原始形状物体进行抓取规划的方法,成功地将抓取规划方法应用于平行颚式夹持器对圆柱形罐的抓取。RAHUL 等[37]针对纸钵苗开发了二自由度的机械手,开发了一种完整的单片机逻辑编程技术,使两个独立的输入链同时平滑地驱动。在机器人输入关节轨迹的开始和结束采用抛物线混合,以最小化连续运行时的动态振动。
此外,机器人手臂可以根据速度、移栽效率和各种传感器的有效性柔性控制。HU 等[38]设计了一种夹持器用于在温室中对穴盘苗进行移栽。在某些情况下,全器械平行爪钳是开发的重点。IRWIN[39]开发了一种具有集成的伺服/触觉感应功能的抓爪,该抓爪具有两个可互换的平行手指,能够独立运动。每个手指独立提供的力/扭矩信息减少了对工作物体的精确固定要求。HWANG 等[40]使用平行的指形取苗器并配有圆形板,在圆形板上覆盖海绵材料,避免损伤秧苗苗径。KUTZ 等[41]将平行颚式夹持器修改为幼苗夹持器,将两个由镀锌金属板制成的扁平指形取苗器安装在夹持器上,夹取秧苗。
1.6 移栽取苗机器人
将机器人应用到农业生产中,一直是研究人员的研究热点,在许多农业领域很早就开始了应用[42]。机器人能够很好的应用在移栽上,主要因为移栽是重复性动作,不需要复杂的传感器和控制系统。移栽为劳动密集型产业,劳动力紧缺是普遍问题,机器人的应用可以减少劳动力。
MODEN 等[43]所描述的移栽机在送苗和取苗过程中使用电气控制。在早期的移栽机为了实现取苗的自动化,使用带有末端执行器的工业机器人来完成移栽任务。HWANG 等[40]开发了一个5 度自由度的机械手和一个夹持器,并应用于辣椒移栽机,采用8 位微型计算机控制机械手,移栽效率达到6 株/min。KUTZ等[41]采用Puma 560 机器人和一个平行的钳形夹持器将高密度(392 株/盘)钵苗移植到低密度(36 株/盘)秧盘上,移栽效率11 株/min。TING 等[44-45]使用选择性柔顺装配机器人手臂(SCARA)型机器人,通过末端执行器垂直接近育苗盘,机器人末端执行器完成完成图10 中的路径1-2-3-4,垂直离开育苗盘完成取苗过程。单苗移栽效率达18~23 株/min。

图10 机器人取苗过程Figure 10 Robot seedling pick-up process
LI 等[46]通过尺寸综合设计了一种4 自由度SCARA 轻型取送苗并联机器人。该虚拟机器人的设计可以达到150 次/min 的取苗速度。PANDILOV[47]以及BOURBONNAIS 等[48]得出结论并联机器人相对于串联机器人具有很大优势。LI 等[49]提出了一种利用量化B 样条曲线生成运动的高速取苗并联机器人轨迹规划方法,运动平滑,末端执行器的残余振动较小。
1.7 取苗机构性能比较
上述6 种取苗机构适应于不同场景,其优缺点见表1。针对的秧苗形态也不一样,最大取苗速度可达180 次/min。
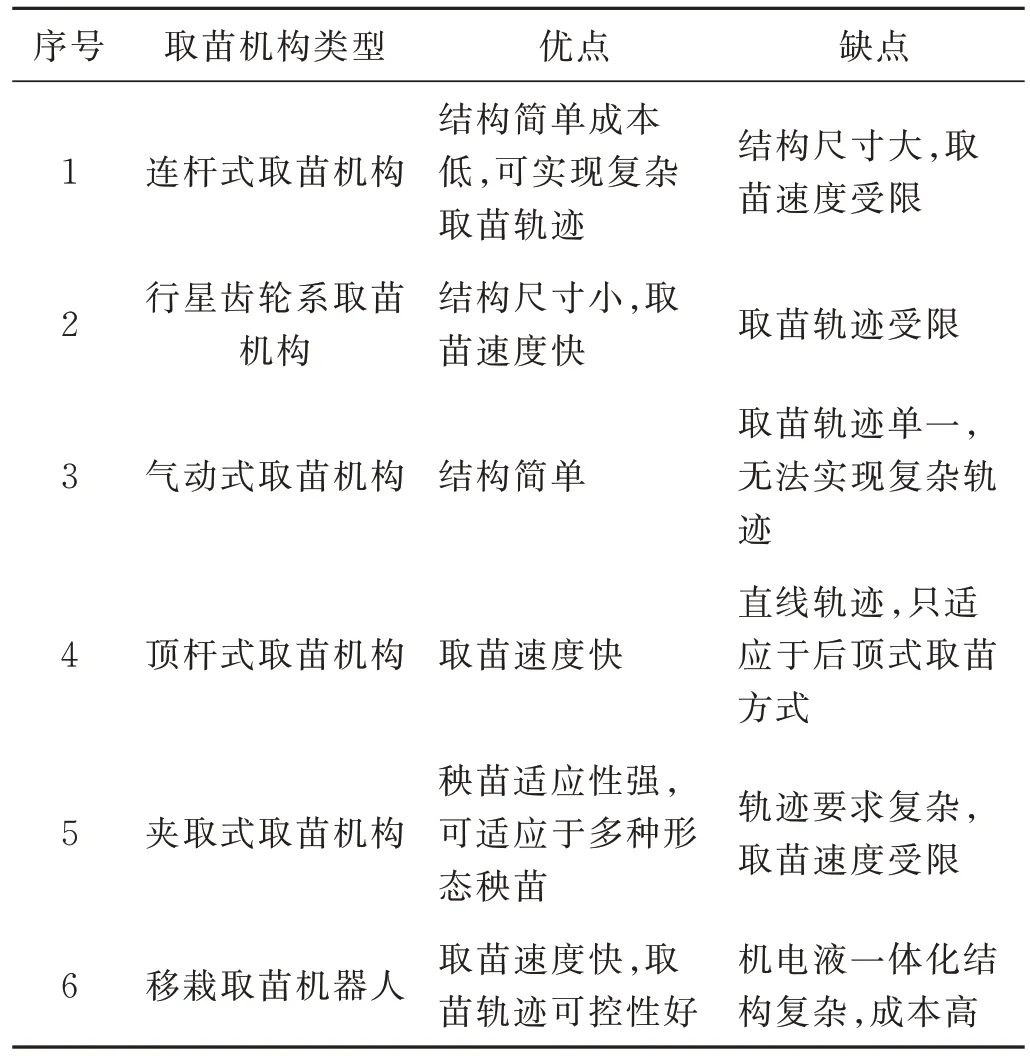
表1 取苗机构性能比较Table 1 Performance comparison of seedling taking mechanism
2 机器视觉技术在取苗机构上应用
在秧盘中,有些秧苗可能缺失或生长不良。为了提高秧盘育秧的质量,很多学者使用机器视觉系统来监测秧苗引导机械手进行移栽。TAI 等[50]研制了一种机器视觉辅助的自动移栽机。通过机器视觉系统对秧盘空穴进行识别和定位,有利于取苗机构选择性准确取苗,通过对15 种秧苗的视觉评估,移栽合格率达95%。BEAM 等[51]设计了一种补苗系统,使用机器视觉系统检查秧苗移栽是否成功,引导一台自动取苗机构重新取苗移栽。SANDINI 等[52]使用机器视觉基于颜色、体积和三维形状等来评估要秧盘中秧苗的质量。LING等[53]用机器视觉技术测量番茄幼苗的冠层表明其质量,人工和机器视觉分割的冠层部分边界测量的冠层面积差异-2.6%~2.3%。FENG 等[54-55]使用机器视觉系统来评估秧苗质量,以实现秧苗的自动分类和后续移栽。TONG 等[56]采用机器视觉技术检测秧苗状况,定位空穴和不良秧苗,引导机械手进行秧苗移栽。采用二值图像中的噪声去除方法进行了比较,选择了较为合适的方法。结果表明,识别成功率较高(96.2%)。
3 旱地移栽取苗机构发展趋势
3.1 现有取苗机构存在问题
现有旱地移栽取苗机构对于多数需要移栽的作物已经实现了机器替人的作用,取苗速度也大大提升。但还仍然存在以下问题:
1)取苗速度仍然需要提升。现有取苗机构理论取苗速度达到180 次/min,还有提升空间。
2)取苗质量待提升。现有取苗机构通过夹取秧苗或者基质,秧盘底部顶出秧苗等取苗方式都需要直接与秧苗或者基质接触,在高速取苗过程易造成损伤。
3)智能化程度需加强。很多全自动移栽机上已经实现了自动化,但距离智能化还有距离。缺少能够智能识别秧苗状态调整取苗机构的速度和轨迹等智能系统。
3.2 取苗机构发展趋势
1)向高速方向发展。通过创新机构形式以及增加智能化等手段可以提高取苗速度,例如农业农村部南京农业机械化研究所针对油菜移栽效率低问题,借鉴了水稻插秧机原理,创新了油菜毯状苗切块取苗对缝插栽的移栽方式,取苗速度达到220 次/min,但仅适用于不是严格一穴一株的作物。
2)向智能化方向发展。旱地移栽取苗机构总的来说以实现自动化为目的,提高效率降低劳动强度,最终实现智能化。对于同一盘秧苗秧苗状态对取苗机构的取苗速度、轨迹等参数要求不一样,可通过检测秧苗状态实时调整取苗机构参数,实现高速、低损取苗。
3)农机农艺融合方向发展。取苗机构要与秧盘类型相互匹配,为了实现全自动移栽Nambu 等[57]开发了一种由纸钵连接形成的“纸钵链”苗,这种秧苗一般的取苗机构都无法实现高质量取苗移栽。取苗机构对于移栽至关重要,但是对应的育苗技术也同样重要,机械需要标准的育秧盘[58]不同秧苗型式对应最适合的取苗机构。通过工厂化育秧等配套技术完善以及取苗机构的发展,移栽机的性能和可靠性能够大大提高。对于移栽作物的产量和推广移栽机意义重大。
4 结论
1)取苗机构对于移栽自动化,提高作业效率和质量都很重要,针对取苗机构的研究较多,也取得了很多成果。机械式的取苗机构结构简单,成本低,目前在广泛使用,但存在取苗不成功的问题,例如夹持式取苗器可以通过夹紧其茎将其拔出,由于秧苗的大小,品质,秧盘中的位置和采摘力的不同,取苗机构的夹紧可靠性不好。为了解决这个问题,顶杆式取苗器用于蔬菜钵苗,损伤较小。但是对育苗盘的水分含量提出了一些要求,而且对秧盘的质量要求很高。
2)机器人取苗机构目前还只适应于固定的温室作物移栽作业,大田作业环境不受控制[59],导致行走在不平的土壤表面机具振动,移栽质量不可靠以及影响机具寿命。成熟的取苗机器人都是应用于静态情况下,从高密度育秧盘中移栽到低密度盘中。研究人员正在开发用于野外应用的自动机器人系统[60],通过适应大田环境的机器人系统的成熟,移栽机将更加的高效。
3)采用了图像识别加装传感器的方法来识别是否准确取苗,如果未能准确取苗可以重新取苗。如果取苗机构的轨迹合理,则可以拔出秧苗,而不会损伤秧苗根部。但是这些机构相对复杂,有时会发生伤苗现象,而它们的运动稳定性还需要进一步研究。
