GNSS与精密监测机器人联合测绘在应急监测中的应用研究
2023-12-15杜文博冯建强
杜文博 冯建强
(南水北调中线信息科技有限公司,河北 石家庄 050035)
目前南水北调中线干线工程外观监测地表测点以水平位移监测和垂直位移监测为主。水平位移和垂直位移监测均需要稳定的参考基准点和基准框架,虽然外观测量工作基点每年都进行复测修正,但是在实际外观监测中,由于基点标石布设位置、地质条件、埋设质量、环境变化等因素影响,工作基点变化仍然时有发生,尤其是当遇到灾害性天气进行应急监测时,数据时效性和数据质量常受影响,对监测结果判断分析造成干扰。
本文以南水北调中线干渠河南卫辉潞王坟试验段外观应急监测为实例,利用GNSS静态相对定位技术和国家一等水准测量获得工作基点正确的平面和高程坐标作为基准坐标,再利用精密监测机器人点位测量技术获得监测点的空间几何关系,通过坐标系转换得到现场工程独立坐标用于变形监测周期数据比较。实践表明,GNSS静态测量技术和精密监测机器人点位测设技术联合测绘,可解决应急监测中作业区域工作基点不稳定、渠道收敛观测无方向性等问题,可以为同类工程提供实践支持。
1 测量原理
1.1 GNSS静态相对定位技术
GNSS静态相对定位技术,是以若干台的GNSS接收机来跟踪卫星信号,根据观测的载波相位数值,使用求差的方法,得出各个观测站之间的基线向量也就是坐标差[1]。再用基线向量和坐标来对其他各个观测点的坐标进行计算。GNSS静态相对定位技术可以有效地消除或大幅削弱轨道误差、电离层误差、对流层误差等[2],可以获得很高的相对定位精度。
本项目采用的是由华测P5北斗参考站接收机和C220GR 3D扼流圈天线组成的GNSS系统,该系统主要提供精密定位服务,抗干扰能力强,数据获取稳定可靠,可以提供平面相对定位毫米级的定位服务。
1.2 精密监测机器人点位测设技术
变形监测中使用的精密测量机器人是一种能代替人工进行自动搜索、跟踪、辨识和精确照准目标并获取角度、距离、三维坐标以及影像等信息的智能型全自动电子全站仪[3]。它是集成了压电陶瓷驱动马达技术[4]、CCD影像传感器构成的视频成像系统[5],配置智能化的控制系统及专业应用软件,可在较短时间内对多个观测目标进行持续和重复观测。本项目使用的是Leica TM50精密测量机器人,角度测量精度0.5″,距离测量精度0.6mm+10-6L(L为测量距离),测程1.5~3.5km。
1.3 变形监测
监测点一般分为基准点、工作基点、监测点[6]。基准点需在工程影响以外区域,要求地质条件良好、基础稳固、有一定的稳定时间,用于检验工作基点的稳定性以及进行数据修正,有一定的数量要求。工作基点用于日常监测,要求位置相对稳定、便于观测,其设置数量及分布可根据现场条件和作业需要来确定。监测点根据现场情况合理布设,要求有代表性,并与监测对象结合牢固。变形监测时将仪器架设在工作基点或基准点上,采用方案中设计的方法进行观测。
在本应急监测项目中,由于作业区域狭窄,采用工作基点和监测点两层布设方式,GNSS设备用于工作基点的稳定性判别及数据修正,精密监测机器人采用极坐标法、距离收敛法获取监测点相对于变形方向的位移值。
2 应用研究
2.1 工程概况及项目背景
项目测区受河南”7·20”暴雨影响,测段桩号SYD0+650断面附近出现滑坡险情,安全监测外观队伍受甲方委托对其进行应急监测。该渠道断面区域为深挖方区,地质条件以膨胀岩土为主,渠道左岸为五级马道且坡度较大、右岸为二级马道,马道之间边坡均用防水雨布覆盖,并有施工队伍现场施工,作业区域狭窄、工程扰动较大、监测环境复杂。经过现场勘察和历史数据分析,现场多数工作基点处于渠道变形区域内,且工作基点不稳定。为保证监测工作持续开展,能够准确地反映变形部位变形情况和趋势,根据现场环境和设备设施条件,采用GNSS与精密监测机器人联合测绘对应急监测区域的监测点(或新增点)进行监测,见图1。
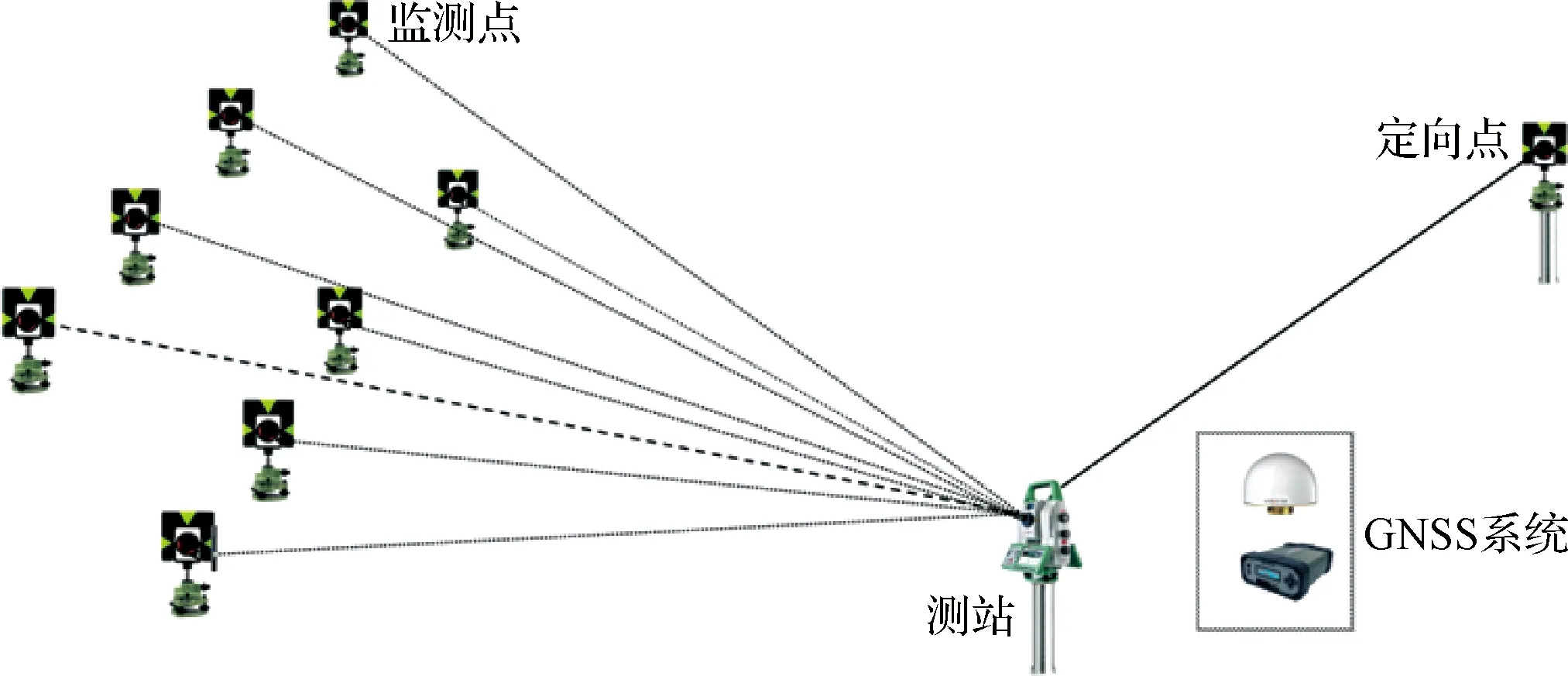
图1 GNSS与精密监测机器人联合测绘示意图
2.2 渠道监测点的精度要求
现场勘测后,根据《土石坝安全监测技术规范》(SL 551—2012)规定,监测方案需经过拟定监测方法、线路图形设计、测点精度估算,确定监测仪器及施测等级,垂直位移与水平位移最弱工作基点相对于邻近基准点点位中误差不超过±2mm;垂直位移与水平位移监测点的监测精度为:相对于邻近工作基点点位中误差不超过±3.0mm。
2.3 监测点位精度估算
2.3.1 GNSS监测控制网现场试验
将待定点和原有控制点以网连接的形式组成观测图形,按2h、4h、6h不同观测时段进行同步GNSS静态观测,获得GNSS各时段的测量数据,使待测区基点的固定解算成果精度满足点位精度限差要求,从而最终确定GNSS仪器设备以及静态观测技术指标要求。本项目在相对稳定工作基点上架设6台华测P5北斗参考站接收机,采用C220GR 3D扼流圈天线,基点为带有强制归心装置的观测墩[7],试验阶段采集两个时段,时段一作为相对初值,每时段6h(可以拆解时段),两个时段数据经过内符合检查,固定单点平差,对精度进行估算,最终确认观测时段为4h数据精度较为合理,时长4h两期数据比较分析见表1。

表1 GNSS静态测量两期数据
2.3.2 监测点三维坐标精度估算
采用Leica TM50测量机器人对监测区域内棱镜群进行数据采集,假定控制点稳定,架站点和定向点选在带有强制归心装置的观测墩上,在监测期间对中底座一直安装在监测水泥墩上,仅对上面的仪器和棱镜连接器进行拆卸,滑坡区域的监测点棱镜直接连接在水泥桩上,故此可以忽略测量期间的仪器安装对中误差。Leica TM50测量机器人(标称精度:测角0.5″,测距0.6mm+10-6L(L为测量距离)),按照一测回进行测点精度估算,数据精度估算模型和现场监测见图2和图3。

图2 数据精度估算模型

图3 现场监测
仪器高和棱镜高均为固定值,忽略对中和量高误差影响,因此测量误差只与观测量有关,监测点平面坐标和高程计算公式如下:
(1)
监测点的平面点位中误差可由式(2)计算:
(2)

(3)
同理,监测点的高程点位中误差可由式(4)计算:
(4)
将方向中误差0.5″、测距精度[0.6mm+10-6L(L为测量距离)]代入计算公式,距离控制在400m之内,推算监测点平面、高程点位中误差与竖角、斜距的关系,见表2~表3。

表2 平面点位中误差与竖角、斜距关系计算

表3 高程点位中误差与竖角、斜距关系计算
每次测量时需要选择合适的时间段并根据全站仪提供的气象改正公式按照实测气象参数进行计算改正,避免大气遮光给距离测量带来误差。
3 数据处理与分析
3.1 工作基点稳定性分析
应急监测前期,为获得监测点稳定可靠的监测数据和初步判断工作基点相对稳定性,监测队伍用GNSS静态相对测量技术对工作基点水平坐标进行定期检核;工作基点的高程延用渠道原1985国家高程基准,水准基准点和工作基点联测按国家一等水准测量要求进行。复测数据经过处理后用限差法对其稳定性进行分析判断[8],即将每次GNSS静态复测水平数值、一等水准测量得到的高程数值与首期基准值比较,当差值小于其最大测量误差(取2倍中误差)时,认为工作基点相对稳定或变化不显著。在本项目中监测队伍采用了较高精度的仪器,并且进行内符合检验,所测精度高于规范要求限差,数据稳定反应灵敏。同时为方便数据处理,避免数据修正频繁造成数据繁杂混乱,限差可按规范工作基点点位中误差限差要求执行,即当工作基点检核数据发生的突变(或累计变形量)不超过±4mm时不进行修正。
其中,以D6为约束平差固定点,在连续一个月的应急监测期间,各工作基点基本稳定,其中部分工作基点可能受电离层、对流层、星历变化等影响,存在小幅的波动,但均未超过限值。
3.2 空间坐标系转换
GNSS静态测量时,采集的变形监测控制网中的工作基点为世界大地坐标系(WGS-84)下的坐标(L,B,H),而现场监测为更好地反映监测点相对渠道中心的变形,需建立以工作基点为坐标原点,以顺水流下游方向为X轴正方向,垂直X轴指向渠道中心为Y轴正方向的测区独立用户坐标系(x,y)。为保持数据的一致性,方便监测数据周期性复测比较,需建立两者之间的坐标转换模型,将观测成果转变为用户坐标系。在实际工程中,由于变形监测研究的是周期性的相对位移量、监测区域较小,可简化转化过程,分两步进行:一是,在GNSS随机软件中完成基线解算,并选择合适的投影带和投影面完成WGS-84椭球下的坐标投影计算,计算WGS-84平面坐标;二是,利用四参数法或三参数法完成WGS-84平面坐标到测区坐标系的平面转换。在项目中做好数据衔接,建立起相关固定公式就可以开展测区日常常规监测,本项目采用固定一点一方向方法进行平差计算。
3.3 极坐标法与收敛法测量改进
3.3.1 极坐标法测量改进
在进行极坐标测量时,常规的极坐标测量方法,是在完成设站后采用单点检核,即通过检核后视定向点数据来判断基点的稳定性,当在限差之内时,开始采集监测点数据。但改进后的极坐标在设站完成后,通过引进对比设站和数据后处理的方法对监测点开展不间断数据监测,即精密测量机器人架设在点O,在完成设站后对定向点B、检核点C进行分别校核,判断架设站的稳定性。当发现工作基点发生突变(或累计变形量超限)时,利用其他稳定基点和本工作基点分别对相同监测点(3~5个)进行数据采集,这样因为有共同的观测对象,可以建立空间几何关系,再结合平面四参数法[9](两个平移参数、一个旋转参数、一个尺度因子)对工作基点O进行数据修正,可解决GNSS静态测量不具备观测条件或GNSS数据更新不及时的问题,达到监测及时、数据准确、监测连续、实时动态监测的目的。
3.3.2 收敛法测量改进
传统的测距收敛法在渠道中应用时,仅能获取渠道左右岸监测点的水平距离,在观测后通过观测值与上期值的差值来判断两点在垂直渠道水流方向的相对变化进行预警,属于一维数据监测,在监测方面存在以下不足:
a.数据不准确。对于渠道左岸、右岸具体测点,无法获得准确的变化数据。
b.容易误判。当两点变形在同一方向时,测距数值变化差值可能为零,存在误判现象。
c.数据分析困难。当断面上多个测点发生变化时,无法通过数据对断面上的测点作出整体判断,即无法判断断面左右岸整体变化趋势,甚至分析结果相互矛盾。
在实际测量中,由于渠道布设的基点基本上为左右岸对称且各测点和基点在同一个横断面上,在日常监测时仅仅监测渠道横断面上左右岸对称测点的内缩或外扩变形。在操作中,在渠道一侧分别在测点上架设仪器观测对岸对应测点的水平距离,架站及搬站较多。进行收敛观测法改进后,在一侧固定基点上架设仪器,观测对岸所有测点的水平距离,通过距离变化判断测点相对于渠道中心的位移量,当基点变化时用GNSS监测数据对其进行修正。例如,选择左岸基点L1为工作基点架设仪器对右岸变形监测点进行观测。距离收敛法监测见图4。
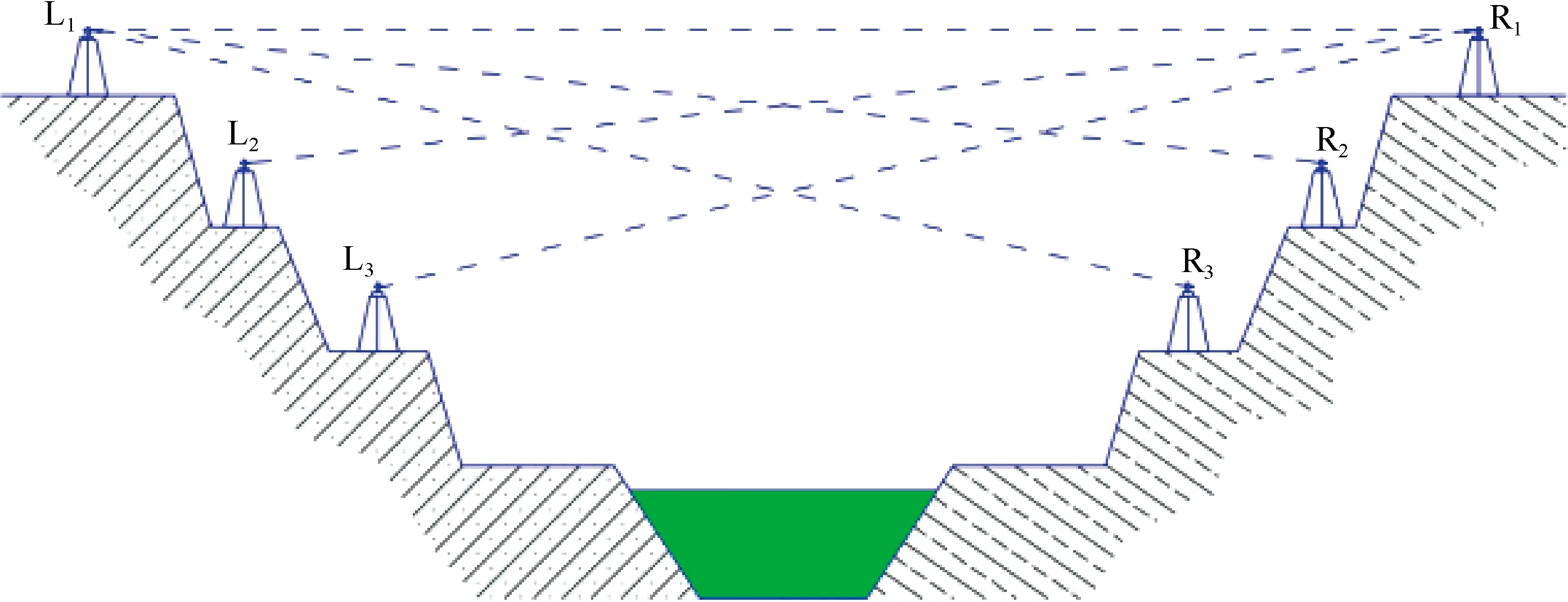
图4 距离收敛法监测示意图
用收敛观测获得右岸Ri监测点的水平距离Li,当工作基点L1稳定时,各期间隔位移计算公式如下:
ΔL=Li-Li-1
(5)
式中:Li为右岸监测点Ri本期水平观测值;Li-1为右岸监测点Ri上期水平观测值。
当工作基点发生变化时,架站点坐标O变为O′,利用GNSS测得基点的坐标变化值,经过坐标转换,得到基点在渠道断面上的修正值变量ΔV,间隔位移公式如下:
ΔL=(Li-ΔV)-Li-1
(6)
3.4 监测数据周期性比较
以监测项目中重点关注断面SYD0+650左岸部分测点为例,项目监测期间用GNSS静态测量定期对工作基点进行稳定性判断及分析,工作基点SYD92在应急监测期间内在北方向、东方向位移累计变化-0.7mm,0.9mm,不超过允许误差±4mm,工作基点稳定。采用过程线图分析断面左岸监测点累计变形量(见图5)[10],图5显示Leica TM50测量机器人用改进的极坐标测量方式,在高频率(每天)监测过程中监测点数据(ΔY=测量误差+实际变形值)精度稳定可靠,并且监测数据整体优于规范中水平位移监测点相对于邻近工作基点不超过±3.0mm精度要求。

图5 SYD0+650断面左岸监测点累计变形量曲线
4 结论及建议
a.本文从工程实际出发结合现场监测环境,采用GNSS静态相对定位技术解决了在狭长区域内工作基点不稳定、基准数据不连续性等问题。
b.文中采用的极坐标法精度估算模型可为监测点三维位移观测提供理论支撑,尤其是对垂直位移的观测由接触式测量(几何水准测量)向更加安全的非接触式测量方式转变,为应急监测中存在滑坡风险的渠段,可提供可靠的、满足精度要求的安全监测模式。
c.文中对传统极坐标和收敛观测方法进行了改进,使监测点数据持续、数据波动可控,并且使收敛观测中的监测点变形大小具体化、方向化,更能反映渠道左右岸边坡整体变形趋势。
d.狭长变形区域的应急监测,监测精度和方法始终是变形监测研究的重点,还可以通过增加GNSS采集时段长度、增加测量机器人测回数、采用极坐标双站测量等措施提高监测精度,更加充分地发挥GNSS静态测量与精密测量机器人联合测绘的监测优势。
