SVG滑模控制策略及处理器在环测试研究
2023-12-13冯贺凯智泽英尹聚酉
冯贺凯,智泽英,尹聚酉
(太原科技大学 电子信息工程学院,太原030024)
伴随中国工业的不断发展,越来越多的阻感、阻容性以及非线性负载接入电网,对电网的电能质量造成了严峻挑战。SVG作为无功补偿及谐波抑制的一种重要手段,在保障电网安全有效运行方面有着突出的作用[1]。
SVG是一种非线性、强耦合的系统,并且自身稳定性较差,易于受到外界因素的影响。针对这些问题,国内外学者提出了多种不同控制方法。文献[2]提出了电压、电流双闭环PI控制方法,可以有效的吸收无功功率,但电压外环动态响应较差。文献[3]中电流环采用PR控制、电压环采用PI控制,能够获得更高的补偿精度,但也加大了控制系统参数设计的难度。文献[4]通过一种变论域模糊PI控制的方法,获得了较快的动态响应,但启动阶段直流侧电压波动较大且达到稳态后电容电压纹波也比较大。
本文以电压型桥式电路的SVG为研究对象,推导了SVG在dq坐标轴下的数学模型,并以此为基础进行控制系统的设计。其中,电压外环采用滑模控制、电流内环采用前馈解耦控制。最后通过处理器在环测试,验证了控制算法在代码层面的有效性与可靠性。
1 静止无功发生器的数学建模
假设SVG三相电路的参数对称,开关器件为理想开关器件、系统电源为理想的三相对称电源。电压型SVG电路拓扑结构如图1所示;图中Ea、Eb、Ec为三相电网电压;Ua、Ub、Uc为SVG输出的基波电压;ia、ib、ic为SVG交流侧的输出电流;R为滤波电感L与开关器件的等效电阻;Udc为直流侧电容两端的电压。
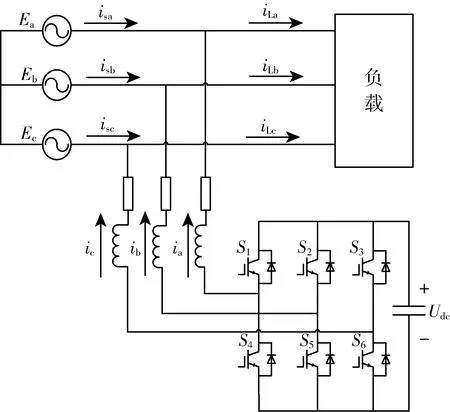
图1 SVG结构图Fig.1 Structure diagram of SVG
由基尔霍夫电压、电流定律可知,在abc三相静止坐标系下的数学模型为:
(1)
在abc三相静止坐标系下,输出电流为三相正弦波,直接求解较为困难。为了便于系统分析与控制器的引进,将abc坐标系下的数学模型转换为dq坐标系下的数学模型。根据等幅值的坐标变换,abc到dq坐标变换矩阵为:
Cabc/dq0=
式中:θ=wt,w为电网电压角频率,则式(1)在dq同步旋转坐标系下的数学模型为:
(2)
式中:id、iq分别为SVG输出补偿电流的d轴、q轴分量;Ud、Uq和Ed、Eq分别为SVG输出基波电压与电网电压的d轴、q轴分量。
2 电流环前馈解耦设计
由式(2)可以看出:静止无功发生器的d轴与q轴之间是一种相互耦合的关系,即d轴变化会影响q轴,q轴变化会影响d轴;为了使dq两轴相互独立,采用PI前馈解耦的控制策略对电流内环进行控制[5],控制方程如式(3)所示。
(3)
式中:Kp、Ki分别为PI调节器的比例、积分系数,idref、iqref分别为d轴与q轴上的电流给定值。将式(3)代入(2)得:
(4)
由式(4)可以看出,d轴与q轴之间已实现解耦,电流内环解耦图如图2所示。

图2 电流内环解耦图Fig.2 Current inner loop decoupling diagram
SVG在实现d轴与q轴之间的解耦后,其电流内环相当于单输入单输出系统,内环控制等效图如图3所示。

图3 电流内环控制等效图Fig.3 Current inner loop control equivalent diagram
3 电压环滑模变结构控制器设计
本文电压外环采用滑模变结构的控制策略,被控量为直流侧电容电压。为了获取更好的动态性能,选取被控量参考值与实际值之间的误差作为系统的状态变量,定义误差变量为:
(5)

s=e1+ke2
(6)
式中:k为滑模常数。将式(5)代入式(6)得:
(7)
由能量守恒定律可知:
(8)
将式(8)代入式(7)得:
(9)
式(9)可进一步推导为:
(10)
(11)
结合电压与电流环的控制器设计可知,SVG双闭环控制系统框图如图4所示。

图4 SVG双闭环控制系统框图Fig.4 SVG double closed loop control system block diagram
4 处理器在环测试
PIL测试是基于模型设计(Model Based Design,MBD)中一个重要环节,是检验控制算法在代码层面能否有效运行的重要步骤。运用MBD进行嵌入式软件开发,可将Simulink中控制器模型直接生成软件代码,省去了编写代码的过程,提高了软件开发效率。
在进行PIL测试之前,首先根据上文所提出的数学模型以及滑模控制的原理,在Matlab/Simulink中搭建了SVG系统的仿真模型。如图5所示,仿真模型包括SVG主回路、电压源、负载、滑模外环控制、解耦内环控制、空间矢量调制模块等。

图5 SVG系统仿真模型Fig.5 SVG system simulation model
根据处理器在环测试的原理,搭建了PIL测试平台,如图6所示。测试运行之前,首先需要将控制器模型生成代码并写入DSP中;运行过程中,电压、电流信号通过RS232通信线完成开发板与上位机之间的数据交换。
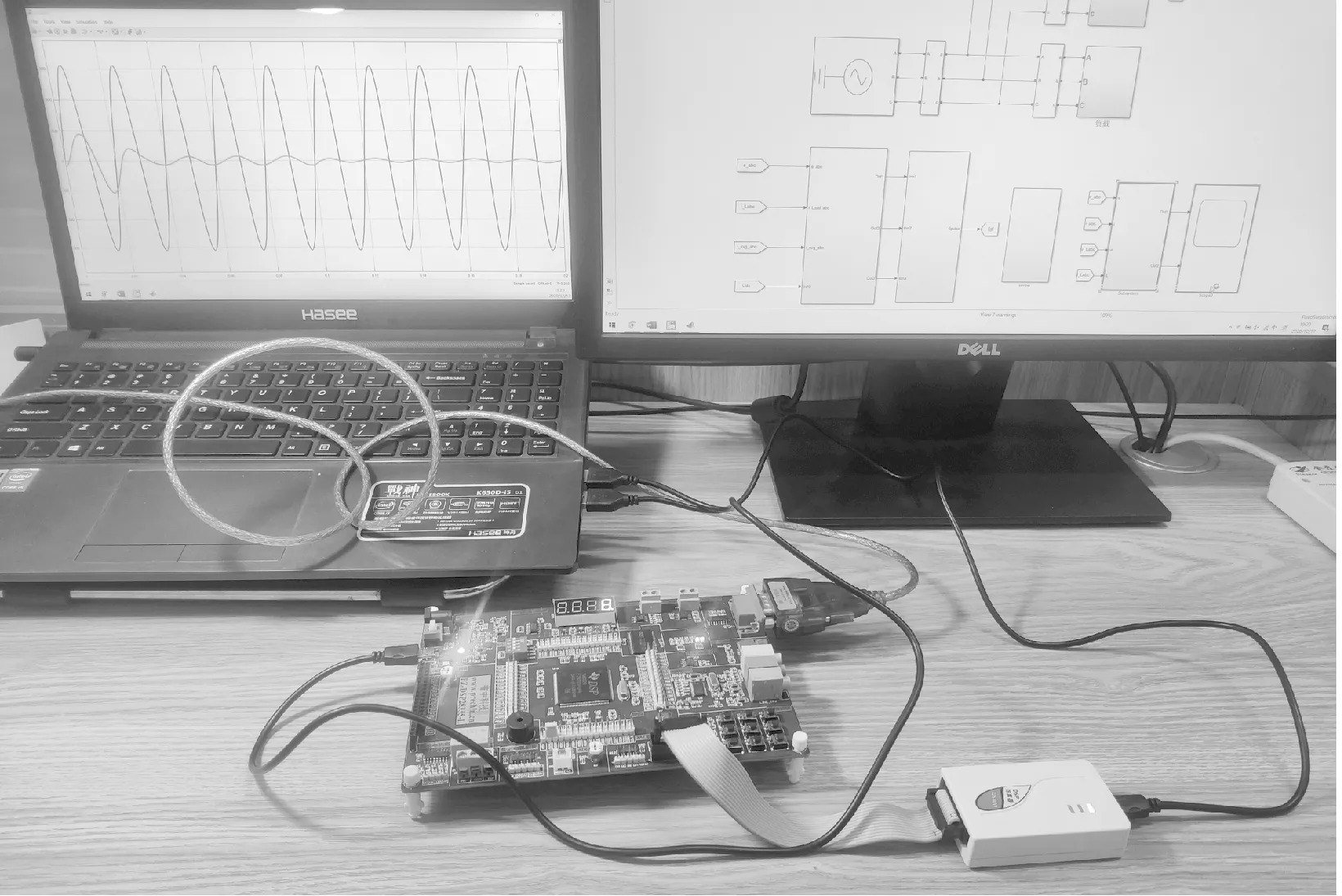
图6 PIL测试平台Fig.6 Processor in loop test platform
4.1 代码生成
在搭建完成系统的控制模型后,需要配置生成代码的环境与格式,相关配置如表1所示。
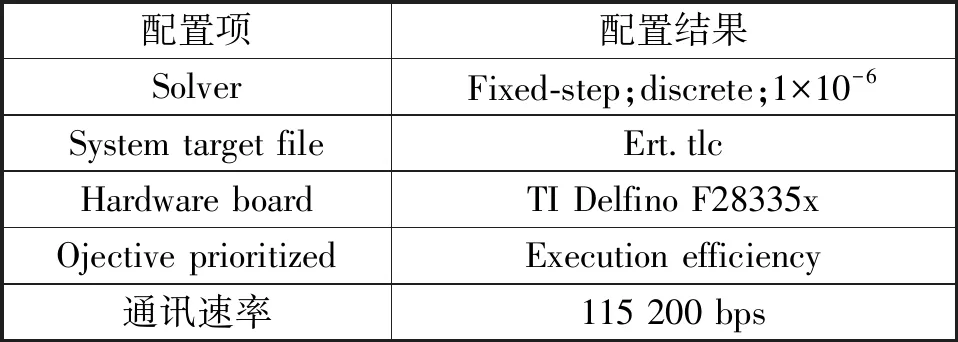
表1 PIL测试的相关配置
由表可知,Simulink中求解器类型选择步长为0.000 001 s的离散求解器;生成格式为Ert的嵌入式文件;开发板选择为TI公司的F28335;将代码执行效率设为最高优先级;上位机与开发板的通信速率设定为115 200 bps.
将上述选项配置完成后需要对控制系统子模块进行命名,便于追溯模型与代码的对应关系,图7为生成代码报告。

图7 生成代码报告Fig.7 Generate code report
图8为滑模外环控制器所生成的代码。观察代码可知,生成代码中的变量是以Simulink中信号线名称来命名的。
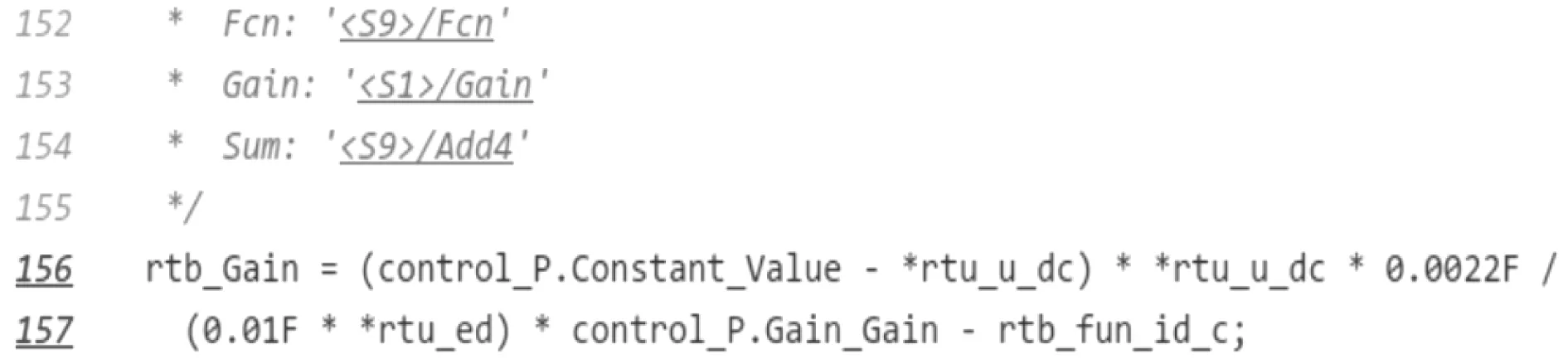
图8 滑模外环控制器代码Fig.8 Sliding mode outer loop control code
4.2 仿真结果
本次测试中,控制系统的详细参数为:电压等级为380 V,电源频率为50 Hz;开关频率为6 kHz;负载电阻为5 Ω,负载电感为0.05 H;交流侧电感为0.02 H,等效电阻为0.5 Ω;直流侧电容为2 200 μF;为了加快补偿速度,设直流侧电容的初始值为500 V,给定值为800 V.
仿真实验过程为:在0.2 s之前,令无功电流指令iqref为零,系统不进行无功补偿;在0.2 s时启动无功补偿,之后系统工作状态不发生改变。
图9与图10分别为电压外环采用PI控制与滑模控制时直流侧电容电压的启动波形。两图对比可知:相较于传统PI控制,采用滑模控制的电压波形超调量更低、调节时间更短、动态响应更好,并且当电压外环采用PI控制器时,需要考虑到比例、积分两个系数,而滑模控制器仅需考虑一个滑模系数,简化了控制参数的设计。
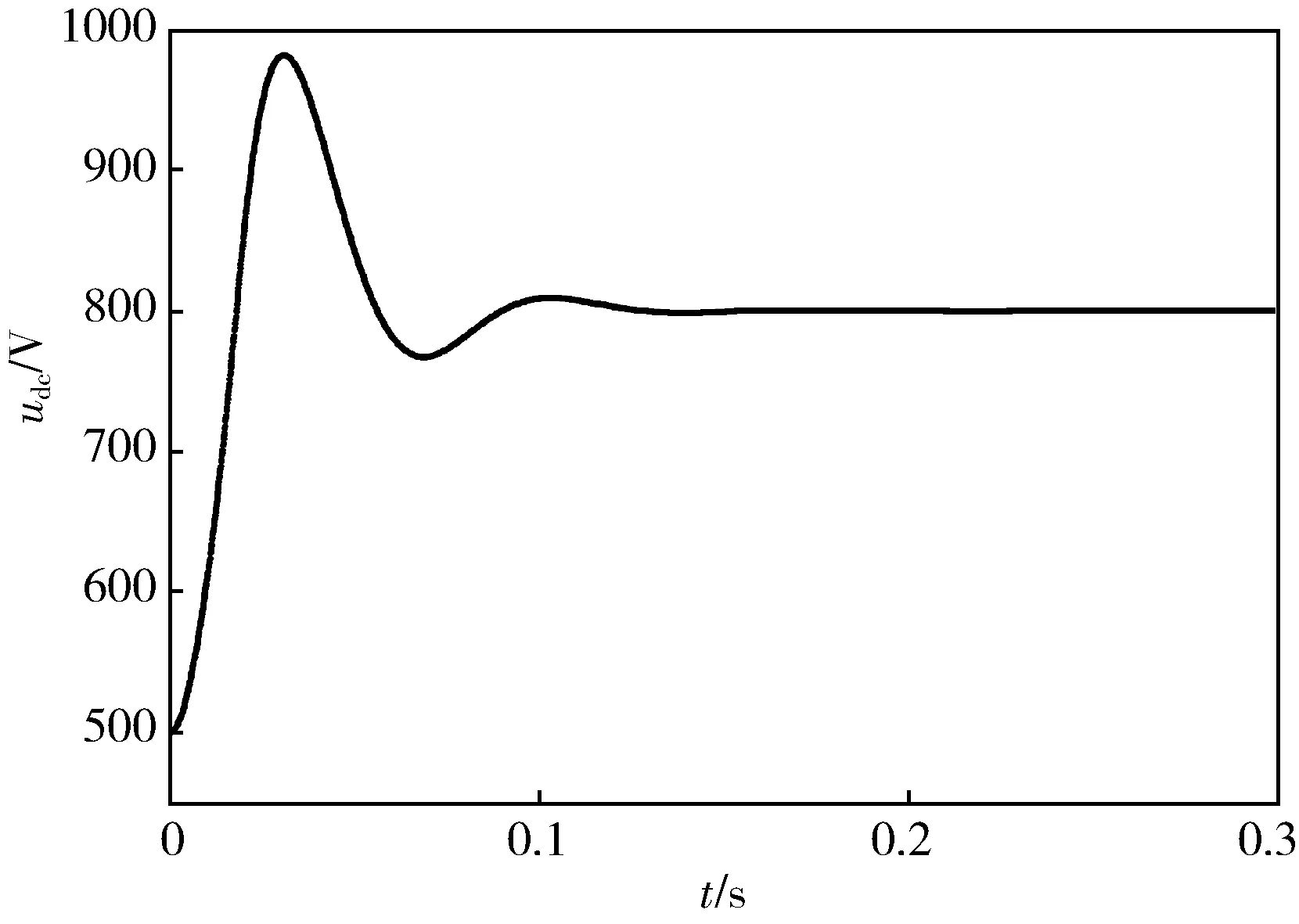
图9 传统PI控制直流侧电压Fig.9 Traditional PI controls the DC side voltage

图10 滑模控制直流侧电压Fig.10 SMC DC side voltage
图11与图12分别为两种控制方式下电网侧A相电压、电流波形。观察可知,当在t=0.2 s启动无功补偿时,两者动态响应差异较小,并且都在一个周期内完成无功补偿,这是由于内环采用了前馈解耦的方法,无功功率的调节是由q轴决定的,电压外环仅对直流侧电容电压起作用。

图11 PI控制网侧A相波形Fig.11 A phase waveform on the PI control grid side
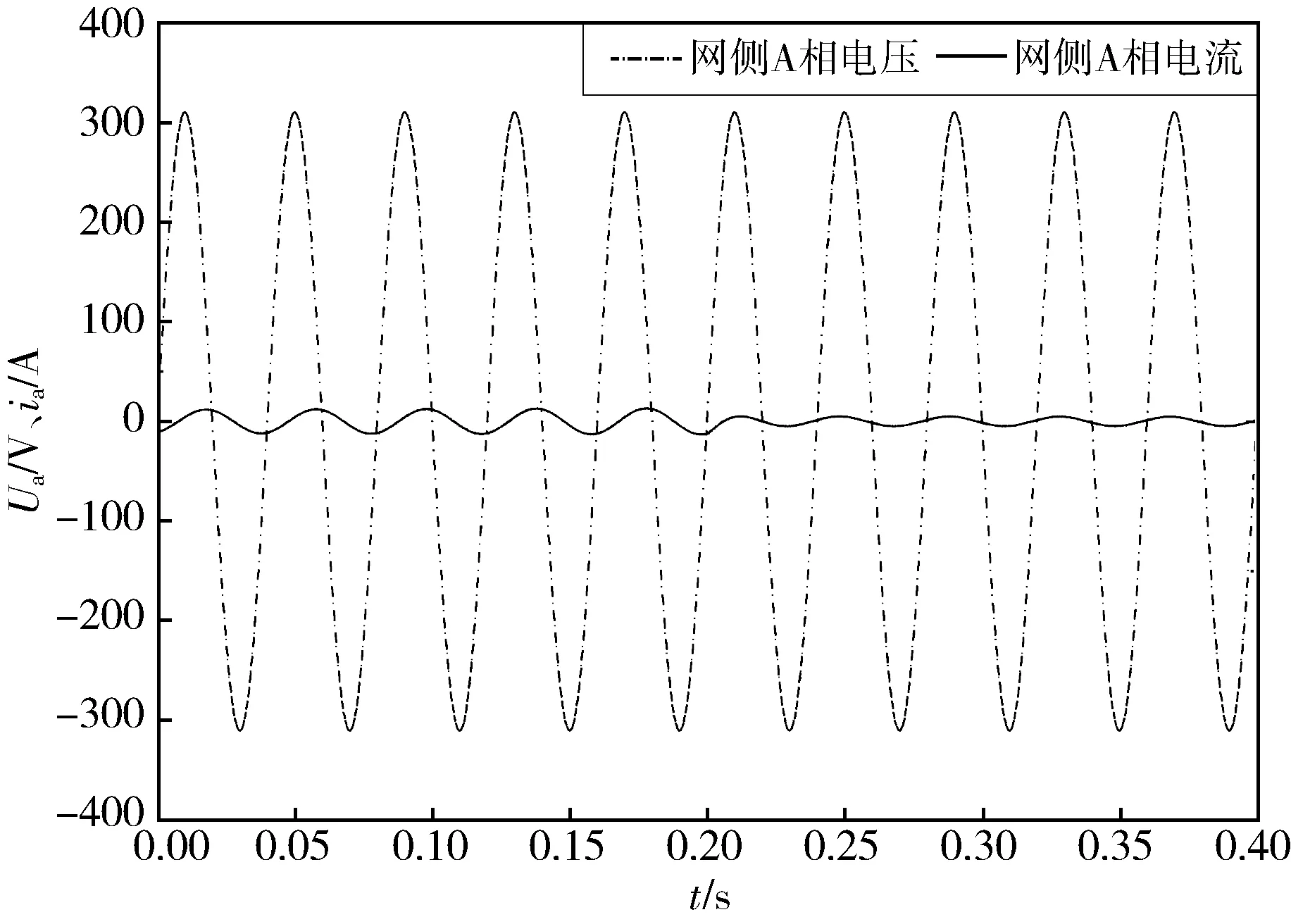
图12 滑模控制网侧A相波形 Fig.12 A phase waveform on the SMC grid side
图13与图14分别为两种控制方式下电网侧A相功率因数的波形,当0.2 s开始无功补偿时,两者都在一个周期内实现了无功补偿,但由图13可知,其功率因数在启动阶段波动较大,这是由于启动时电容电压超调量较大且变化速度较快,对电网造成了较大冲击,图14由于滑模控制下电压超调量小且幅值变换较为平缓,从而避免SVG在启动阶段出现电网侧功率因数过低的情况。

图13 PI控制A相功率因数Fig.13 The PF of phase A on the PI control
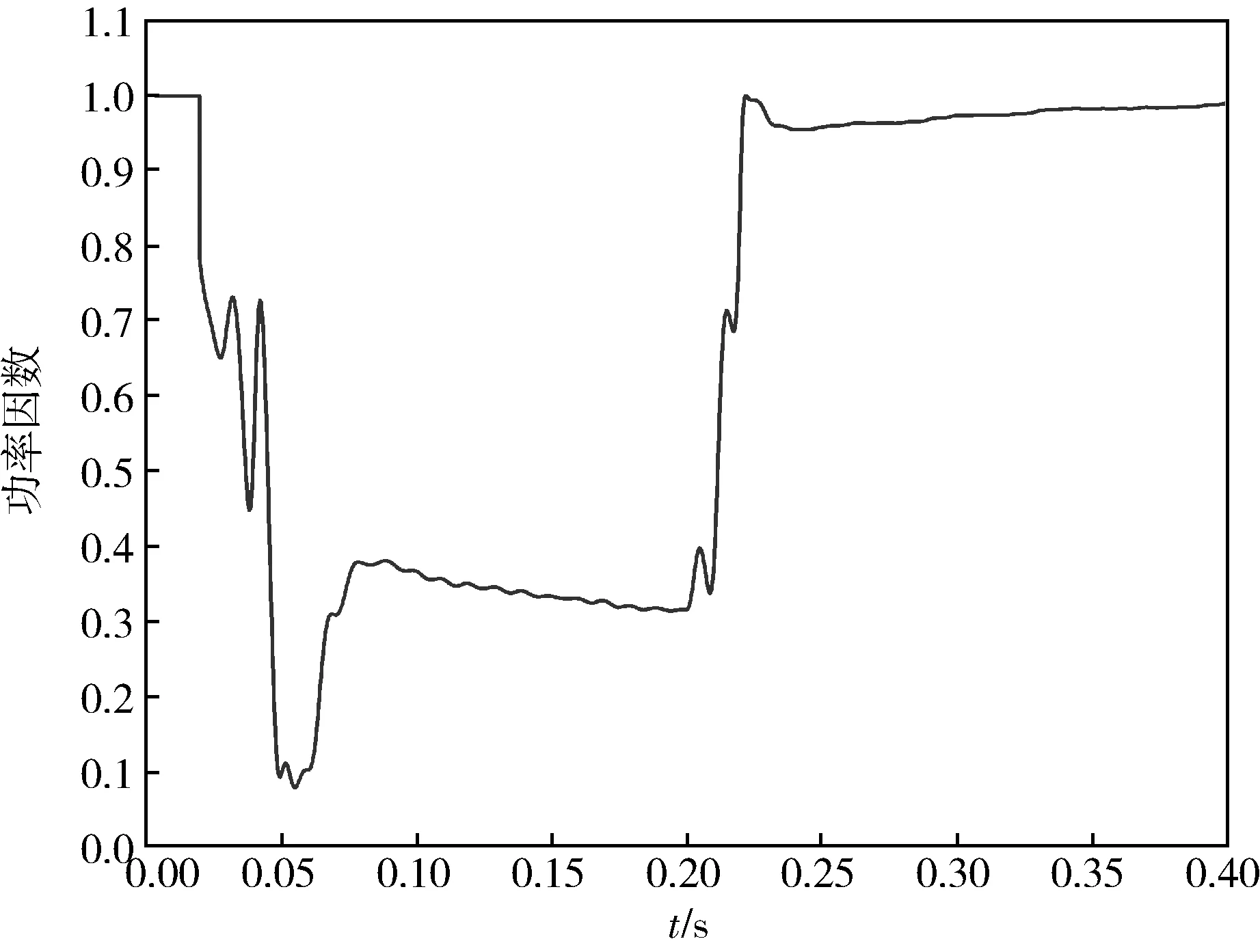
图14 滑模控制A相功率因数Fig.14 The PF of phase A on the SMC
5 结论
本文以SVG在dq坐标系下的数学模型为基础,采用了电压外环滑模控制、电流内环PI解耦的控制策略,并使用PIL测试对该控制策略在软件代码层面进行了可靠性验证。验证结果表明,该控制策略在代码层面
可以有效运行,并且相比于传统PI控制方法,滑模控制的直流侧电容电压动态响应更快、参数设计更为简单,能够及时对负载进行无功补偿。