武器装备可靠性间接分配法分析探讨*
2023-12-11宋广
宋 广
(92785部队 葫芦岛 125208)
1 引言
随着时代发展与技术进步,人们越来越重视产品可靠性设计,而可靠性设计的第一步便是可靠性分配。可靠性理论工作者和工程技术人员已经提出了多种实用的可靠性分配方法,如评分分配法、层次分析分配法、比例组合分配法、AGREE 分配法、直接分配法等,以帮助产品设计师开展可靠性分配。
这些方法的分配目标是使分配结果满足产品唯一的可靠性总体指标,属于单目标可靠性分配方法,一般也仅适用于可靠性框图为串联结构的系统。但现代很多大型武器系统,在设计之初就赋予其多种任务使命,各任务使命也分别给出了可靠性指标,其可靠性分配结果应同时使得各任务使命的可靠性指标均得到满足,属于多目标可靠性分配。而且为了提高任务可靠度,往往采取冗余措施,其可靠性模型就不限于串联结构。这就提出了多目标可靠性分配方法研究的需求,本文将以多任务系统为例进行初步探讨。
2 武器系统多任务系统可靠性特性
为方便多任务系统可靠性分配方法研究,现梳理和约定多任务系统的可靠性特性如下:
1)系统具有m 个组成单元,各单元的寿命服从指数分布;
2)系统具有n 个任务使命,各个任务使命执行主体是系统全体组成单元的某个子集,至少存在两个子集的交集不为空集,各组成单元在不同任务中的工作时间可能不同;
3)n 个任务使命各自具有其任务可靠度指标,其任务可靠性框图可以为串联结构,也可为非串联(并联、串并联、并串联、混联)结构。
3 武器系统多任务系统描述

任务执行主体的组成用表格描述较为清晰,见表1。
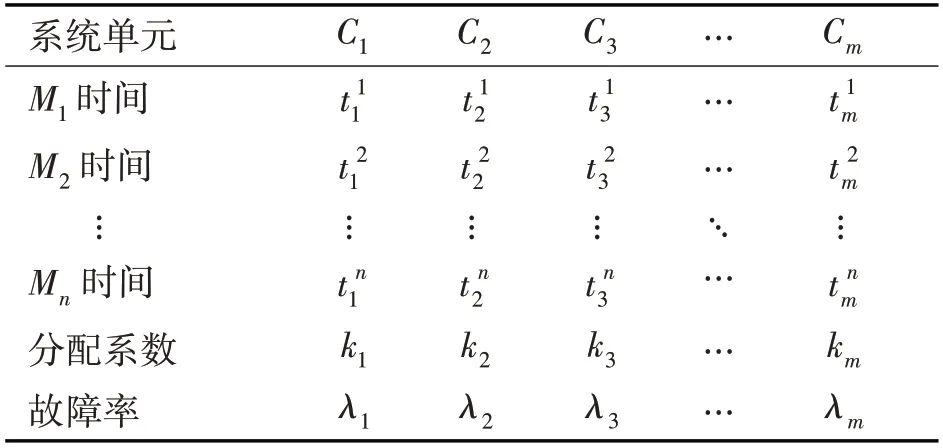
表1 各任务执行主体组成表
4 武器系统间接分配法
对于上述多任务系统,其原本的分配参数为n个任务可靠度指标。若采用单目标分配方法逐一对单个任务可靠度指标分配时,其分配范围仅限任务执行主体限定的组成单元,不能对该任务执行主体之外的单元实现分配;在完成所有任务可靠度指标分配过程后,各任务执行主体交集内单元会被多次分配指标,可能造成单元指标冲突。基于此本文放弃直接对原分配参数进行分配的思路,提出以下分配方法。
1)首先为系统基本可靠性模型(由全体单元串联构成)给出一个系统故障率指标λs;
2)将系统故障率指标λs在全体单元范围进行分配,得到各单元故障率。因为基本可靠性模型为串联系统,可以选用单目标分配法进行分配,确定一组分配系数k1、k2、k3…km,就可给出各单元的故障率表达式;
3)已知各单元故障率及其在某任务剖面中的工作时间条件下,就可给出各单元在该任务中的可靠度表达式;
4)将各单元可靠度代入某任务可靠性模型(串联、并联、串并联、并串联、混联等),便可得到该任务可靠度分配值表达式;
5)再根据任务可靠度分配值应该大于等于其指标值的基本分配原则,就可以求得λs的合理取值范围;
6)最后根据一定原则(如临界分配或裕量分配),在λs合理取值范围取一确定值λ*s,将其分配给各个单元就可得到单元故障率分配值,完成系统可靠性指标分配。
可以看出,本方法并不对原分配参数进行直接分配,而是通过确定一个新分配参数(系统故障率)的合理指标值并将其分配给各单元,使得原分配参数(各任务可靠度)均满足其指标要求,从而达到可靠性指标分配目的,因此该方法称为间接分配方法。
5 在串联系统中的应用
串联系统结构简单,可以得到分配结果的解析解,下面按上述思路进行数学推导。
5.1 数学推导
首先利用单目标分配方法(如评分分配法、层次分析分配法等)确定一组分配系数为k1、k2、k3…km,使其满足式(1):
将系统故障率λs(在此为一个参变量)按照分配系数在全体单元范围内进行分配,得到各单元故障率分配值表达式为
单元Cj在任务Mi中的可靠度为
因为任务可靠性模型为串联结构,所以第i 个任务可靠度分配值表达式:
根据可靠性分配的基本原则,可以得到如下不等式组:
解这个不等式组可得:
利用单元分配结果,计算第i 个任务可靠度校验值为
5.2 分配步骤

2)合理选择单目标分配方法,确定一组分配系数k1、k2、k3…km;
5)根据式(8)进行单元故障率分配;
6)根据式(9)计算任务可靠度校验值,进行分配合理性校核。
5.3 应用示范
下面举例演示利用该方法进行串联系统可靠性分配的具体过程。假设某多任务系统A 共有6个组成单元,可靠性框图为串联结构;3 个任务使命,其任务可靠度指标分别为0.85、0.90、0.95。
分配过程:
1)根据各任务剖面,梳理各任务执行主体组成单元的任务工作时间见表2,单位为h;
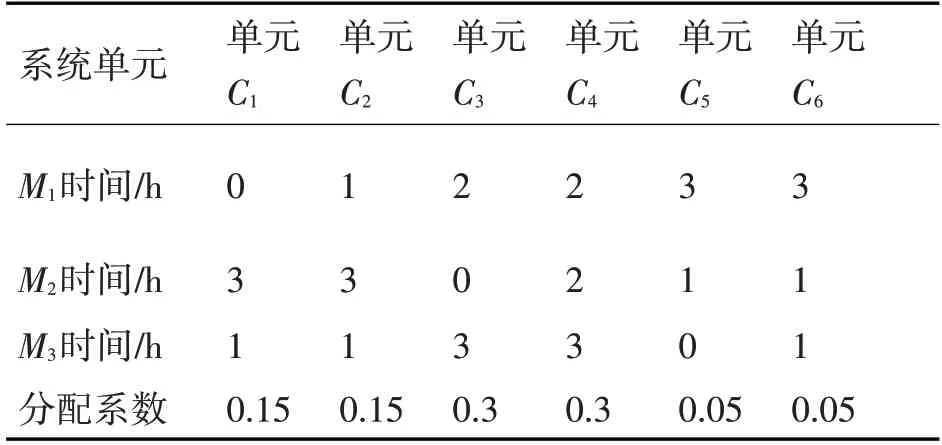
表2 系统A各任务执行主体组成表
2)选择单目标分配方法,确定分配系数,结果见表2;
6 在非串联系统中的应用
为了对比串联系统与串并联系统在总体可靠性指标相同时,各组成单元可靠性水平要求的差异,假设多任务系统B 其组成单元、任务使命及其任务可靠度指标、单元工作时间、分配系数与前面系统A 完全相同,见表2。但其各任务可靠性框图为串并联结构,如图1所示:当执行任务1 时,单元1 不工作;当执行任务2 时,单元3 不工作;当执行任务3时,单元5不工作。
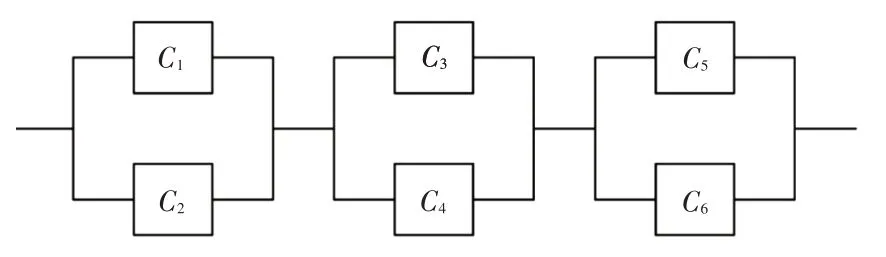
图1 系统B任务可靠性框图
设系统故障率为λs,则三个任务可靠度函数分别为
利用三个任务可靠度指标约束可得不等式:

串并联系统属于冗余设计,在总体指标要求相同情况下,其系统基本可靠性及单元可靠性要求相比系统A降低了很多。
7 结语
本文分析了多任务系统可靠性分配的多目标性,指出了传统可靠性分配方法在多目标分配中的局限性,进而提出了一种可靠性间接分配法:针对系统基本可靠性模型,选择新的分配参数(如系统故障率)进行组成单元可靠性分配,并使得原可靠性分配参数(如任务可靠度)均满足指标要求。
针对组成单元服从指数分布的串联系统,将分配过程进行了详细数学描述与推导,给出了分配结果的解析解;并通过范例演示了该方法在多任务系统串联系统和非串联系统可靠性分配中的具体应用。
该方法既适用于单目标可靠性分配,也适用于多目标分配,既适用于串联系统分配,也适用于非串联系统分配,为系统可靠性分配提供了新的途径。