协作机器人专利技术研究热点及趋势分析
2023-12-09王雪婷
冯 龙, 王雪婷, 何 华
(北京市科学技术研究院 智能装备研究所, 北京 100061)
0 引言
随着全球劳动力成本的不断增加, 制造企业需要开发新技术以提高生产率。机器人技术的更新迭代,使人机协作显示出巨大潜力。相比传统工业机器人,协作机器人凭借着安全、灵活、易部署等特点,快速融入多元场景,在工业、物流、医疗、教育等诸多领域实现了良好应用,尤其自2020 年新冠肺炎疫情发生以来,协作机器人因具有无人接触、远程服务、代替人工等优势,更是发挥了重要作用,得到了快速发展。专利作为科技发展的前沿蕴含着大量的技术创新信息, 通过对协作机器人的专利进行分析能够客观地认识到行业相关技术的研发现状, 对相关政府、高校、科研院所及企业的决策制定、调控及研发布局具有一定的意义[2]。 本文聚焦协作机器人,通过使用incoPat 全球专利数据库,从时间及地域两个维度对协作机器人技术热点及技术发展趋势进行研究, 为国内协作机器人企业、高校科研院所的技术研究和创新提供参考。
1 数据来源及检索方式
1.1 数据来源& 检索方式
本文专利检索部分数据来源为Incopat 全球专利数据库,辅助使用ItgInsight[6]工具进行数据分析[1]。 在进行检索前, 首先结合协作机器人的主要构成和应用领域对协作机器人技术主要IPC 分类号进行提取, 在得到协作机器人IPC 分类号的基础上,结合协作机器人常用关键词,确定协作机器人专利检索式。
1.2 IPC 分类& 检索降噪
通过将协作机器人技术分为本体技术、控制系统技术、驱动系统技术及应用场景技术四大类后, 再依据IPC 分类表对各技术关键词匹配IPC 分类号, 得到协作机器人技术分支及其对应的IPC 分类号[4],如表1 所示。 由于协作机器人应用领域广泛的特殊性,为防止医疗机器人、服务机器人等与协作机器人无关的噪声出现,本文检索侧重于“检准”原则。 因此检索结果可能无法涵盖一些“非典型”协作机器人公司所申请的专利,如镁伽科技公司的相关专利。

表2 国内协作机器人研究热点省市专利技术主题词分布
2 全球协作机器人专利技术研究热点及趋势
2.1 全球协作机器人专利申请趋势
虽然近年全球机器人产业专利增速逐步趋缓[3],但协作机器人专利申请呈快速增长态势。 从1985—2022 年全球协作机器人领域专利申请情况来看, 协作机器人发展大体分为3 个阶段。 第一阶段(1985—2007):在这一阶段,专利申请较少,数量在10 件以内波动。 申请人数量也较少, 企业投入意愿较低, 处于技术的萌芽期。 第二阶段(2008-2014):专利申请数量较之前有明显攀升,整体呈增长态势,数量维持在100 件以内。 第三阶段(2015—至今):自2015 年起,协作机器人专利呈急剧增长态势,并在2021 年达到顶峰,数量为918 件。由于专利公开存在滞后性,2021—2022 年部分发明专利未能完全统计在内。因此2022 年专利申请量的下降并非实际专利申请量下降。

图1 全球协作机器人专利申请趋势
2.2 全球协作机器人专利技术演变
从1985 年—2022 年的发展历程来看,协作机器人的研究热点主要经历了三个阶段:
第一阶段(1985—1990 年):多以协作机器人本体结构和用于机器人的控制方法为主展开研究, 代表专利如1986 年来自保加利亚的“协作机器人平衡机械手”专利、1987 年来自美国发那科的“机械腕机构“专利、1990 年来自日本的“用于机器人的控制方法”专利等;
第二阶段(1991—2009 年):在这一阶段,关于协作机器人本体的基础研究逐渐增多, 并依次在焊接、 装配拆卸、理疗按摩、机床加工等工业领域开展应用研究。 同时关于轨迹跟踪、参数优化、实现人机协同的数据处理等协作机器人关键技术也在这一阶段得到沉淀和积累;
第三阶段(2010—至今):在这一阶段,协作机器人本体研究较之前发展速度有明显大幅提升, 应用场景在深耕工业领域的基础上,逐步向手术医疗、教育、管理等行政领域进一步拓展。同时,关于协作机器人核心零部件技术的专利也开始广泛布局,拖动示教、机器视觉、精度测试、碰撞检测等一系列人机交互和自主认知技术也在这一阶段兴起。

图2 全球协作机器人专利技术研究趋势
2.3 全球协作机器人专利技术研究热点
通过对全球协作机器人主要IPC 分类进行整理和汇纳,可以发现协作机器人技术热点主要分布在本体和末端执行器、焊接装配等工业场景应用、手术理疗等医疗机器人、运动轨迹的跟踪和优化以及算法方面,如图3 所示。
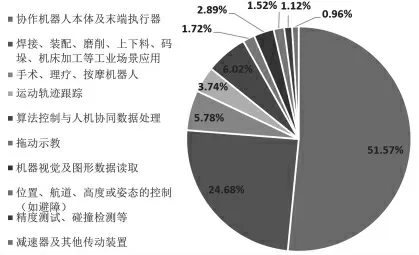
图3 全球协作机器人专利技术研究热点
3 国内协作机器人专利技术研究热点及趋势
3.1 国内重点地区协作机器人专利技术研究热点及趋势
将我国按照长三角、珠三角、京津冀和东北地区进行区域划分,可以了解国内不同地域下的协作机器人热点分布情况。从我国不同地区专利分布来看,长三角地区:协作机器人产业链布局较为齐全,在本体、核心零部件与其他关键技术方面的占比都领先全国其他地区。 相对来说,长三角的研发热点主要包括:协作机器人本体领域;零部件领域中的传感器、控制器、伺服电机与抱闸;关节模组一体化、智能自主和机器视觉等关键技术。 ①珠三角地区:在核心零部件领域具有较强优势,其研发热点主要包括:减速器和抱闸;本体领域中的机器人本体与机械臂以及智能自主关键技术;②京津冀地区:研发热点主要集中于末端执行器、编码器和机器视觉领域,相对而言在机械臂、伺服电机与智能自主技术方面布局占比较少;③东北地区:在运动控制这一关键技术具有明显优势,而在抱闸这一零部件的布局上与其他地区相比具有明显差距,如图4 所示。

图4 国内重点地区协作机器人专利技术研究热点布局

图5 国内协作机器人研究热点省市专利技术申请量
3.2 国内协作机器人专利技术研究热点省市
通过对中国协作机器人专利按照省市进行排名,前五名分别是广东、江苏、上海、北京和浙江,北京在专利申请总量上位居全国第四位。但从发明专利的比例上看,北京发明专利占比最高,达到72.39%,一定程度上反应出北京的研发创新优势。 广东、江苏两地实用新型专利占比较高,一定程度上反应出两地协作机器人研发成果的产品应用较多。
3.3 国内不同省市协作机器人专利布局差异
通过对比不同省市协作机器人专利主题词分布情况可知,北京市在末端执行器、传感器、编码器、关节模组、运动控制与机器视觉等方面具备一定优势; 广东省专利数量在全国排名第一,其产业链布局也较为齐全,其中在协作机器人本体、机械臂、减速器、编码器方面的专利布局上领先优势突出; 江苏省在全产业链布局方面也较为突出,其中,在末端执行器、传感器、控制器、伺服电机、关节模组与机器视觉方面的专利布局优势突出。
4 结论
(1)协作机器人技术发展正处于快速成长期。 从1985—2022 年全球协作机器人专利申请情况来看,协作机器人技术在不断发展,市场在不断扩大,专利权人也在急剧增长。当前, 无论是专利数量还是申请人数量都处于快速增长阶段,并没有放缓趋势,尚未显露出技术成熟期阶段的放缓趋势,因此可以判定协作机器人技术正处于快速成长时期。
(2)协作机器人专利技术创新突破领域。通过分析全球协作机器人专利技术研究热点可以发现, 目前全球范围内在协作机器人拖动示教(G09B)、机器视觉及图形数据读取(G06V)、位置及姿态控制(G05D1/02)、精度测试与碰撞检测(G01B21)以及协作机器人减速器等传动装置方面(F16H)专利技术布局仍较少。 当然协作机器人也面临很多实际应用场景适应性、可靠性与安全性提升的问题。例如通过感知外部极小的力矩变化并做出反应避免碰撞(G01L3/G01L25),让人机协作过程更轻松(G06F)、安全和精准控制(G05D19/G05B)等方面都是在实际应用场景中要解决的问题,上述相关领域可作为后续高校、科研院所及行业企业研发创新的突破口。
(3)协作机器人技术研究热点由机构学向机器视觉、触觉、控制算法、人工智能领域转变。 通过分析全球协作机器人专利技术研究热点及趋势可以发现,目前高校在协作机器人领域的研发方向已由原来的机械手、机械臂的设计向机器视觉、触觉、人工智能、控制算法等方向转变,如哈佛大学目前在做的柔性机器人、斯坦福大学在做的机器人触觉、清华大学在做的视觉语义感知、北京航空航天大学在做的机械臂感知与运动规划等,这些研究的目的都是为协作机器人本体更好的赋能。
(4)协作机器人在非工业应用领域专利技术布局逐渐增长。协作机器人作为一种新兴的工业机器人品类,其产品面向的应用场景已拓展至工业应用场景以外的消费领域范畴,近年协作机器人专利技术在教育、手术、康复、理疗、新能源充电桩、餐饮(饮料制备)、肉类加工、服装(缝纫)等领域申请量逐年增长。 相较于传统工业机器人,协作机器人因具备人机协作、易装配、安全等特点,使其具有更广泛的应用场景领域。
(5)从专利布局看国内主要协作机器人省市布局特点。从国内协作机器人专利技术申请量看,广东省、江苏省、北京市和上海市排名靠前。 从四个省市协作机器人专利技术布局情况看,北京市发明专利占比最高,创新优势明显,这主要得益于北京市高校及科研院所资源丰富,专利大多集中在高校和科研院所[5],且北京市协作机器人企业多以本部加研发机构为主有关。广东省、江苏省专利申请量多,实用新型占比量较高,这得益于协作机器人企业生产制造多布局在两地有关。
