基于最优分配的复合式高速无人直升机纵向控制设计与验证
2023-12-09曹宇燕金鑫彭永涛王琳王云鹤
曹宇燕,金鑫,彭永涛,王琳,王云鹤
航空工业西安飞行自动控制研究所,陕西 西安 710075
随着飞行环境日益复杂,为提高直升机的任务能力和生存能力,对其性能水平尤其是飞行速度提出了更高要求[1-3]。复合式共轴高速直升机结合了旋翼具备垂直起降能力和固定翼飞机高速航程远的优点,是一种应用前景广泛的新型飞行器。共轴高速直升机具有低速模式、过渡模式和高速模式三种飞行模式,涉及常规直升机和固定翼飞机的控制,存在操纵机构冗余、控制难度大的问题。因此,设计共轴高速无人直升机的飞行控制系统,保证飞行安全稳定,具有重要的应用价值。
目前,国内外针对复合式共轴高速直升机的研究大多集中于气动性能和动力学模型等方面[4]。K.Ferguson等[5-8]构建了通用仿真模型,研究了配平和操稳性分析,以及复合构型对飞机飞行力学的影响。袁野等[9-10]研究了周期变距和旋翼控制相位角对飞行动力学特性的影响。有学者聚焦于复合式共轴高速直升机的飞行控制研究。D.Schafroth等[11]利用协方差矩阵自适应进化策略辨识模型参数,设计了微型复合式共轴直升机的H∞鲁棒控制器。Feng Lin等[12]研发了一款概念式共轴双旋翼无人直升机,结合H∞设计非线性飞行控制律。G.T.Ozdemir等[13]设计了基于动态逆的飞行控制律。T.Berger等[14-15]设计了内环的显模型跟踪控制器和外环的动态逆控制器,实现全包线飞行。以上研究工作主要针对飞行的稳定控制,对于复合式共轴高速直升机特有的过渡飞行操纵冗余分配并没有专门提及。Qiu Yuqing 等[16]针对过渡段飞行提出了多步控制分配方法,实现平滑过渡。江顺[17]通过约束旋翼后倒角和机身俯仰角采用配平分析法确定过渡走廊。杨洋[18]给出了各个飞行模式下的操纵权重系数分配图。
上述研究聚焦于高速直升机的模型特性分析和控制算法,本文将重点关注复合式共轴无人高速直升机的控制律架构和过渡段操纵分配研究,针对共轴高速无人直升机的纵向飞行控制系统,设计控制律,合理分配过渡段控制权重,实现安全飞行。
1 无人高速直升机模型
复合式共轴高速无人直升机样机如图1所示。采用共轴上下双旋翼、取消常规尾桨、尾部安装推进螺旋桨、机身后部融合固定翼飞机的升降舵和方向舵的复合式布局。

图1 共轴高速无人直升机样机Fig.1 Coaxial high speed unmanned helicopter prototype
1.1 基本模型
采取分块法建模思路,将共轴高速无人直升机分为共轴双旋翼、机身、升降舵、方向舵、推力桨5个部分并分别建模,得到各个部分的受力,然后在飞机重心处合成各个部分的力和力矩,最后代入飞机六自由度运动方程,即可得到高速无人直升机的数学模型,如图2所示。图2中模型输入为

图2 高速无人直升机模型结构框图Fig.2 Block diagram of model of high speed unmanned helicopter
式中,δB1,δA1,δc,δdc,δe,δa,δr,δT分别为纵向周期变距、横向周期变距、总距、差动总距、升降舵偏角、升降舵差动偏角、方向舵偏角和推力桨距。
1.2 操纵策略
共轴高速直升机既有常规直升机的操纵机构(周期变距、共轴双旋翼差动全动总距),又有固定翼飞机的舵面(升降舵、方向舵、推力螺旋桨)。根据两类操纵机构的适用范围,当直升机处于低速飞行模式时,纵向周期变距控制俯仰,横向周期变距控制滚转,上下旋翼差动总距控制偏航,上下旋翼全动总距控制高度。
当直升机处于高速飞行模式时,升降舵起到常规固定翼飞机升降舵和副翼的作用,俯仰由升降舵控制,滚转由升降舵差动控制,偏航由方向舵控制,速度由推进桨距决定。当直升机处于过渡飞行模式时,两套操纵机构共同参与控制,操纵存在冗余,需要合理设计操纵分配策略。
2 高速无人直升机控制系统设计
2.1 纵向控制律设计
2.1.1 低速飞行模式
设计高速直升机在悬停/小速度段的纵向控制律,主要包括纵向通道和总距通道。在保证姿态内回路控制稳定的基础上设计速度和位置外回路。总体设计如图3所示。

图3 低速飞行模式纵向飞行控制框图Fig.3 Block diagram of longitudinal flight control in low speed flight mode
俯仰姿态控制由纵向周期变距实现,采用俯仰角PI控制和俯仰角速率反馈,阻尼作用快速抑制俯仰姿态震荡。
式中,θg为俯仰角指令给定;θ为俯仰角信号;Kθph、Kθih、Kθ̇ph为控制器参数;δB1trim为纵向周期变距配平值。
纵向速度控制在姿态内环稳定控制的基础上,反馈纵向速度,输出俯仰姿态内环指令。通过控制内环姿态确定纵向周期变距操纵量来达到速度控制的目的。
式中,Vxg为纵向速度给定值;Vx为纵向速度;ax为纵向加速度;KVxph、KVxdh为控制器参数。
纵向位置控制采用比例控制律,直接引入纵向速度和加速度作为阻尼控制,输出纵向比例指令到俯仰姿态内环,简化控制结构。
式中,xg为纵向位置给定值;x为纵向位置;Kxph为控制器参数。
垂直速度控制由总距操纵实现,采用垂直速度反馈PI控制,得到总距通道操纵量。指令输出与航向控制输出综合后给至上下旋翼。
式中,ḣg为垂向速度期望值;ḣ为垂向速度;δc为总距量,Kḣph、Kḣih为控制器参数。
高度控制采用高度信号的PI控制,以垂向速度控制为内回路,并引入垂向速度增加系统阻尼,保证高度响应变化平稳,满足控制精度要求
式中,hg为期望高度;h为高度;Khph、Khih为控制器参数。
2.1.2 高速飞行模式
高速飞行模式下,高速无人直升机周期变距、上下主旋翼总距只需提供配平量,配合参与控制的主舵面是升降舵,推力桨旋翼转速一般固定,通过调节桨距从而改变推力。纵向控制律设计主要包括俯仰姿态控制、垂向速度控制、高度控制和前飞速度控制。总体设计如图4所示。
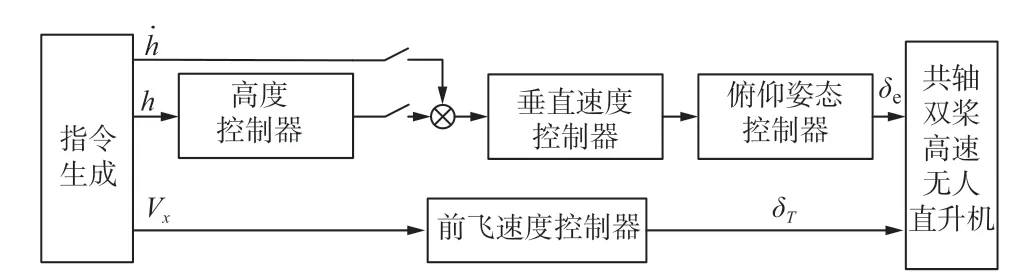
图4 高速飞行模式纵向飞行控制框图Fig.4 Block diagram of longitudinal flight control in high speed flight mode
俯仰姿态控制以俯仰角速率控制为内回路,采用俯仰角反馈比例控制,输出俯仰角速率内环指令。俯仰角速率控制反馈俯仰角速率信号,同时引入掉高补偿,输出操纵指令至升降舵。
式中,θ̇g为俯仰角速率给定指令;θtrim为俯仰角配平值;γ为航迹倾斜角;γ̇为航迹倾斜角速率;Kθ̇pp、Kθ̇ip、Kγ̇p和Kθpp为控制器参数;δe,trim为升降舵配平值。
垂直速度控制以俯仰姿态控制为内回路,反馈垂直速度,采用PI控制,输出俯仰姿态内环指令。通过控制内环姿态确定升降舵偏转量来达到速度控制的目的。
式中,Kḣpp、Kḣip为控制器参数。
高速飞行模式下高度控制以垂速控制为内环,直接反馈高度信号,经过比例控制,产生垂速控制指令。
式中,Khpp为控制器参数。
由于高速阶段无人直升机配平俯仰角为0,因此仅利用推力桨距控制实现纵向前飞速度控制。反馈纵向速度信号,采用PI控制,输出推力桨距操纵量。
式中,KVxpp、KVxip为控制器信号;δT,trim为推力桨距配平值。
2.1.3 过渡飞行模式
过渡模式是直升机速度在40~50m/s的过渡飞行阶段,两套操纵机构共同参与控制,操纵量个数超过控制通道数量,存在操纵冗余。过渡过程中,横侧向主要进行姿态保持控制,纵向设计姿态、速度和高度控制。根据设计的控制分配策略,合理分配两套操纵机构的权重,完成过渡段飞行控制。整体思路如图5所示。
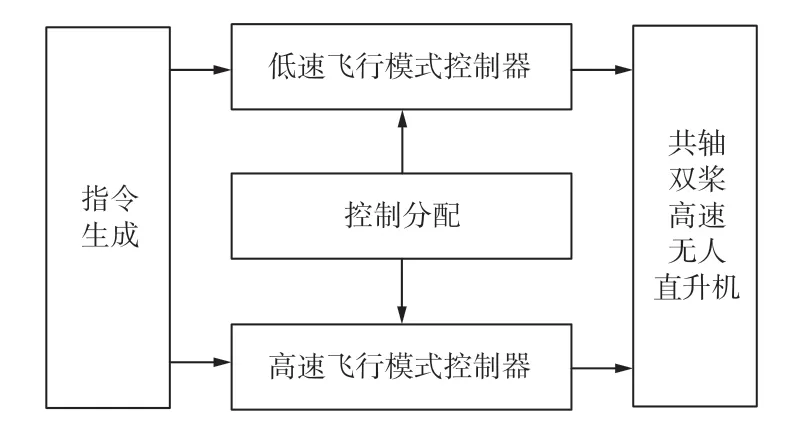
图5 过渡飞行模式纵向飞行控制框图Fig.5 Block diagram of longitudinal flight control in transition flight mode
2.2 基于最优分配的过渡操纵控制
2.2.1 控制分配问题描述
直升机期望的转矩系数矢量为v,称为虚拟控制信号,各个操纵面的偏转矢量为u,即为实际控制量。则控制分配问题转化为已知实际控制量u和虚拟控制量v之间的关系g(⋅)以及虚拟控制量v,在约束条件下求解实际控制量u的问题。当分配是线性分配时满足
式中,Be为控制效能矩阵;u为执行机构偏转量,存在位置和速率限幅,有
其中,u̇i可以表示为
式中,T为采样时间。
再结合式(13)和式(14),执行机构限制可以表示为
其中,上界为
下界为
则控制分配问题可以表示为
即在期望力矩系数v作用下,计算分配输出u。
2.2.2 分配方法
由于各个操纵面偏转受行程、速率、带宽等影响,采用加权伪逆法[19]进行协调分配,优化目标为
式中,W为操纵面权值矩阵。
易得分配问题的解为
由于式(16)已经考虑舵面偏转的行程和速度限幅,则考虑操纵效率和响应速度的影响来确定权值矩阵W。
过渡模式为低速模式飞行到高速模式的阶段,过渡前段以直升机的变距操纵为主导控制,后段以固定翼舵面操纵为主,则过渡阶段纵向周期变距和升降舵的控制权值分别为
考虑操纵效率影响部分的权值矩阵记为W1,有
相比固定翼的气动舵面,由于经过旋翼挥舞这一过程,直升机旋翼的响应滞后较大,假设旋翼挥舞时间常数为TF,则旋翼操纵机构的滞后为相应舵机时间常数与挥舞时间常数之和,固定翼操纵机构的滞后为相应的舵机时间常数。
TδB1、Tδe为纵向周期变距和升降舵的操纵时延,则考虑操纵时延影响部分的权值矩阵记为W2,有
综合式(23)和式(24),操纵面权值矩阵为
3 数字仿真与分析
对样例高速无人直升机进行飞行数字仿真,以飞行速度30m/s、飞行高度1000m 为起始状态点,给定速度指令如图6(a)中红色虚线所示。无人直升机从低速模式向高速转换,高速平飞后再反向过渡到低速模式。

图6 全阶段飞行仿真结果Fig.6 Full process flight simulation results
随着速度由40m/s逐渐增加到50m/s,过渡过程中俯仰角也由负向减小转向正向增大,直升机由过渡前低速模式下的低头保持平衡状态转向高速模式下的微微抬头保持平衡状态。由于高速模式垂直速度控制以俯仰姿态控制为内回路,俯仰角变化会影响垂直速度的变化,越靠近高速模式,影响越大,所以高度存在一定扰动,但从图6(c)和图6(d)可以看出,垂直速度可以稳定到0,高度最终也可以保持到设定值。仿真结果表明设计的纵向飞行控制器可以实现纵向通道的安全飞行。
4 结论
本文结合工程实际,针对复合式高速无人直升机的纵向控制问题,采用经典控制思路设计了低速模式和高速模式的飞行控制律,在过渡段操纵策略的基础上,考虑旋翼和固定翼气动舵面的不同响应速度,设计了控制分配权重,并通过非线性飞行仿真验证了所设计的控制律和控制分配策略的合理性,具有一定的工程应用价值。