一种新型沙地行走步行轮结构设计及仿真分析
2023-12-07常同立李垚岐
常同立, 李垚岐
(东北林业大学机电工程学院,黑龙江 哈尔滨 150006)
草方格技术一定程度上遏制了沙漠扩张,经过多年的发展,草方格沙障技术的相关理论已经日益成熟,草方格沙障防风治沙的效果也十分理想,因此草方格沙障治沙已经成为当今主流的治沙手段之一。然而沙漠地形复杂,沙子松软,即使履带车辆也无法完全满足沙地使用需求,特殊的地形地质特点严重限制了机械设备在沙地上的应用,随着草方格治沙的不断应用,研发具有较高性能的、在沙漠行走的轮足机构具有现实意义。
现阶段轮腿复合型机器人是移动设备技术研究的一个方向,目前主流的轮腿复合型主要分为4种:轮腿分离式,轮腿串联式,轮辐型轮腿,变结构轮腿[1]。其中轮辐型轮腿是将步行机构与传统车轮相结合,最大程度上保持了传统车轮连续滚动的特点,又因其具有运动速度快、可靠性高、控制简单等优势更符合沙漠恶劣环境下行走,具有较高的潜在应用价值。
对于步行轮的研究,早期有前苏联研究人员通过观察动物腿足结构及跨步过程研制了适用于沙地与泥泞作业的步行轮[2]。20世纪80年代,陈秉聪等[3]研制的机械传动式步行轮开启了新的行走机构研究方向;邱晗等[4]发明了转动步行轮等一系列仿足式行走机构,初步实现了跨步式行走;崔莹等[5]研制的可变直径轮,可通过U型弹簧板实现轮子的外伸和收缩,分别适用于松软路面和硬路面的行走;Sutoh等[6]设计了用于两轮行星车的带履刺车轮,以获得到更大的牵引力;张锐等[7]以鸵鸟为生物原型,设计了仿鸵鸟步行轮,实现了对具有固沙能力的鸵鸟足结构的仿生应用研究;杨璐等[8]通过数值模拟和仿真系统测试对叶片伸缩式步行轮进行了研究,叶片可以根据地形阻尼控制伸长量,实现了轮足能耗的控制。为了提高在松软地面的适应性与通过性,许多行走机构的运动形式应用于松软地面行走,但如何使各种运动方式有效融合,实现自如转换显得十分困难,很多理论技术问题尚有待解决。
初代草方格铺设样机如图1所示,其重量约为160 kg。根据整机运作方式与沙地环境特点,采用步行轮作为其行走机构。本文对实验样机的步行轮(以下简称原步行轮)进行改进,设计一种新型步行轮(简称步行轮)。

图1 实验样机(原步行轮)
1 步行轮的设计
研究发现,步行轮的工作性能与轮腿数量密切相关,轮腿数量较少会简化结构、降低制造成本,但也会导致平顺性变差和起步扭矩增大[9]。因此,选择合适的轮腿数量需要考虑多方面因素,包括驱动半径的大小和对车轮平顺性的要求等。根据之前的研究和设计经验,步行轮的轮腿数一般定为6~12之间比较合适[10]。6个轮腿结构因具有较高通过性,符合本课题需求,接下来将对轮足结构进一步研究,改善其运行的平顺性。
步行是人类最基本的行进方式,观察人类行走腿足运动规律,根据足部各部位触地情况可分为初始着地阶段、前掌触地阶段、整足支撑阶段和蹬伸离地四个阶段;结合轮足实际工作需求,将轮足步态划分为四个阶段:站立、行进、前进末期、起步[11]。站立阶段前足脚跟与后足脚掌着地,双足着地增加设备稳定性,可用于静止作业;起步、行进、前进末期这三个阶段均属于单足前行,在此过程中后足蹬伸发力使身体向前方推进,足与小腿以踝关节轴连接,实现触地滚动,随后前掌逐渐着地,足弓下降贴合地面,足底弹性结构被拉长,储存弹性势能,此时足跟离地,足纵弓降低、足横弓抬起,为维持身体的平衡前方足开始触地,完成单足与双足的交替。分析人足的主要结构可知,人足的构成包含由骨、关节组成的刚性结构和由肌肉、韧带和筋膜组成的弹性结构,其弹性结构对轮足设计具有重要参考意义。
1.1 步行轮工作原理
参考上述人类腿足行走规律,将步行轮设计成两个主要部分,一部分是轮腿与轮毂相连接的固定构件,作为实现扭矩输出的主要载体;另一部分则是轮足与轮腿连接的活动部件,根据工作需求简化踝关节结构,保留其在一个平面内的旋转作用,每个轮腿下方前后两个接口通过销轴分别与轮足和弹簧相连接,弧形足为对称结构,其另一接口与减震弹簧的另一端通过销轴连接,由销轴连接的三个部分形成转动副。与普通刚性轮足的主要区别在于结构上增加了减震弹簧结构,轮足采用弧形设计,以足底相对地面滚动的形式实现行进,新型步行轮如图2所示。

图2 新型步行轮1.轮毂;2.轮腿;3.弹簧;4.轮足
以单个轮足运行情况进行分析,在轮足触土初期,轮足的后端接地,轮足受到冲击后弹簧处于拉伸状态,将部分动能转化为势能,缓解冲击力,完成前进末期到站立阶段的转化。在向前滚动过程中,步行轮沿轮足接地面滚动,由于轮足的弧形结构,接地面的圆心与步行轮轮心基本重合,使得轮心上下波动较小,此时弹簧由拉伸状态逐步转变为压缩状态,直到前足触地后,步行轮再次处于站立阶段,等到再次起步时轮足“蹬地”,将弹簧的弹性势能转化为步行轮前进的动能。
1.2 步行轮行走受力分析
对于本文中的轮足结构,其各结构之间受力情况呈现周期性变化。对站立阶段、起步阶段、前行阶段、前进末期阶段四个运行状态进行受力分析,图3为四个阶段下的步行轮受力分析图。O为设备重心也是六个轮足圆心,H为O点到地面的垂直距离,A为前足脚跟触地点,B为后足脚掌触地点,G为轮足受到的下压力及其自身重力,θA、θB分别为前后足触地点到圆心线段lOA、lOB与地面垂向的夹角,T为行进所需驱动力矩,NA和fA为地面对其前足的支撑力和摩擦力,NB和fB为地面对其后足的支撑力和摩擦力。根据力矩平衡方程,可计算出设备正常前进所需的最小力矩,为设备加工提供参考。

图3 轮足前进分析图
由于轮足安装有减震弹簧,其长度会伴随前进状态而变化,通常情况下,由于设备运行在松软地面环境,与地面的碰撞力相对较小,弹簧刚度系数较高,在运行过程中实际变化量较小,在对其进行力矩平衡理论分析时,其微小的变化量可忽略不计,后续进行动力学仿真时需探究弹簧的刚度系数,以保证设备运行过程中的平顺性。
阶段1:如图3a所示。两足同时着地,前足脚跟与后足脚掌位于同一水平面,处于静止站立状态,相对稳定性较好,可适用于设备静止作业,此时力矩平衡公式如下:
T=(fA+fB)·lOA·cosθA+NA·lOA·
sinθA-NB·lOB·sinθB
(1)
阶段2:如图3b所示,设备处于起步阶段,前足脚跟作为转动点,重心上升,此时力矩平衡公式如下:
T=NB·lOB·sinθB+fB·lOB·cosθB
(2)
阶段3:如图3(c)所示,此时为设备前进阶段,单足滚动向前,介于状态2(起步)与状态4(前进末期)之间的一个临界状态,在此状态下所需力矩相对较小,此时力矩平衡公式见式(3)。
T=f·H
(3)
阶段4:如图3(d)所示,此时设备处于前进阶段末期,后足脚掌支撑转动,稳定性较差,重心位于轮足触地点前方,处于下降阶段,此时力矩平衡公式如下:
T=fA·lOA·cosθA-NA·lOA·sinθA
(4)
在设备运行过程中,除主要结构受力情况分析以外,减震弹簧的受力分析也是非常重要的,选择合适的弹簧刚度系数能有效增加设备的稳定性,同时降低能耗,使设备符合严苛条件下应用。在沙地或者松软路面行走时,由于沙粒之间相互挤压流动的局限性,机械设备行走速度缓慢,且如图3(c)所示,转动副P作为足与轮腿的速度瞬心,在对减震弹簧受力计算时,可以P点作为支撑点,N为地面对足的支撑力(取决于设备重力与驱动力垂向分力),L1、L2分别为支撑点到足前后连接点的距离,α为减震弹簧与垂向夹角;当设备处于阶段2时,L2=0;设备行进过程中减震弹簧的受力写为公式(5)。
(5)
1.3 步行轮行进平顺性分析
根据GB/T 7031—2005《机械振动 道路路面谱测量数据报告》将路面划分为A~H共8个等级。沙漠地形的空间频率因具体的沙漠类型而异。沙漠中的沙丘和沙质地表通常具有较高的空间频率,因为它们显示出许多细小的起伏和波纹,可选定为H级。而沙漠中的大型沙漠平原具有较低的空间频率,其变化较为缓慢,可选定为B、C级。

(6)

(7)

2 步行轮的动力学仿真分析
通过多体动力学分析软件ADAMS对各部件进行运动干涉然后进行动态仿真,其ADAMS模型如图4所示。通过添加约束、运动副、弹簧刚度与阻尼系数等,最后设置轮足运行速度及载荷参数,模拟常规工况下步行轮试验[12]并对仿真结果进行分析。

图4 新型步行轮(有足底花纹)ADAMS模型
本文设计的步行轮将主要应用于沙地环境中的工程车辆与移动机器人。沙地中的表层沙具体有固体与流体的二重特性,所以利用多体刚性动力学软件ADAMS模拟分析轮足行进过程,需做一定的合理简化假设[13]。首先,利用ADAMS 建立颗粒模型较复杂,且根据图5新型步行轮(有足底花纹)质心位移图所示,受底部花纹影响,轮足质心波动并不能很好的反应沙地行走情况;为进一步研究轮足行走情况,需简化模拟过程,考虑到松软沙地会产生一定的下限量,因此假设轮足底部花纹全部陷入沙地中,并在行走过程中具有恒定下陷量,去除足底防滑纹路,如图6所示,建立仿真路面为刚性无形变的硬路面,即显示沙地表层沙的固体属性。

图5 新型步行轮(有足底花纹)质心位移图

图6 新型步行轮(无足底花纹)与原步行轮ADAMS模型
步行轮由于其“多边形”效应,在滚动过程中轮心会产生周期性的上下波动,长期使用伴随着巨大的能耗,为清晰直观地反应步行轮的使用性能,检测外力作用下轮足、弹簧的配合,对轮毂施加等效设备重力,在多个驱动速度下进行仿真;之后对步行轮行走过程中的轮心垂向位移波动情况进行分析。以1 m为步距,阻尼系数为0.5 N/m·s-1,分别在弹簧刚度系数为6×105N/m、7×105N/m、8×105N/m、9×105N/m、1×106N/m、1.1×106N/m、1.2×106N/m的情况下以10~150 °/s的速度前进时,记录轮心波动情况,得到不同弹簧刚度系数下轮心垂向位移波动图,如图7所示。从图中可以看出在110°/s时轮足轮心波动最小,此时弹簧刚度系数为1.1×106N/m,轮心波动为0.02 m。

图7 不同弹簧刚度系数下步行轮轮心垂向位移波动图
进一步采用对比分析法对新型步行轮与原步行轮在同一步距、同一速度、同一质量、同一环境下仿真,如图6所示,对轮心垂向位移、轮心垂向速度、轮心垂向加速度等指标进行分析。如图8所示,步行轮的轮心波动范围是0.02 m左右,而原步行轮轮心波动范围达到0.125 m。二者对比可知:原步行轮轮心上下浮动范围为新型步行轮的6.25倍,新型步行轮的多边形效应比原步行轮要小很多。如图9所示的轮心垂向速度曲线图可以看出:在运行平稳之后,原步行轮轮心垂向速度约为2.250 m/s,而新型步行轮轮心垂向速度相对较小,稳定在0.4 m/s以内。由此可见:原步行轮约为新型步行轮轮心垂向速度的5.625倍。如图10所示,轮心垂向加速度体现出与质心波动和垂向速度同样的趋势,当二者皆运行稳定后,原步行轮的垂向加速度在70 m/s2左右,且垂向加速度数据相对紊乱,而步行轮则稳定在15 m/s2。因步行轮起步时加速度为地面垂向方向,其余两个方向并未获得扭矩带来的加速度,在此不做讨论。

图8 质心位移对比图
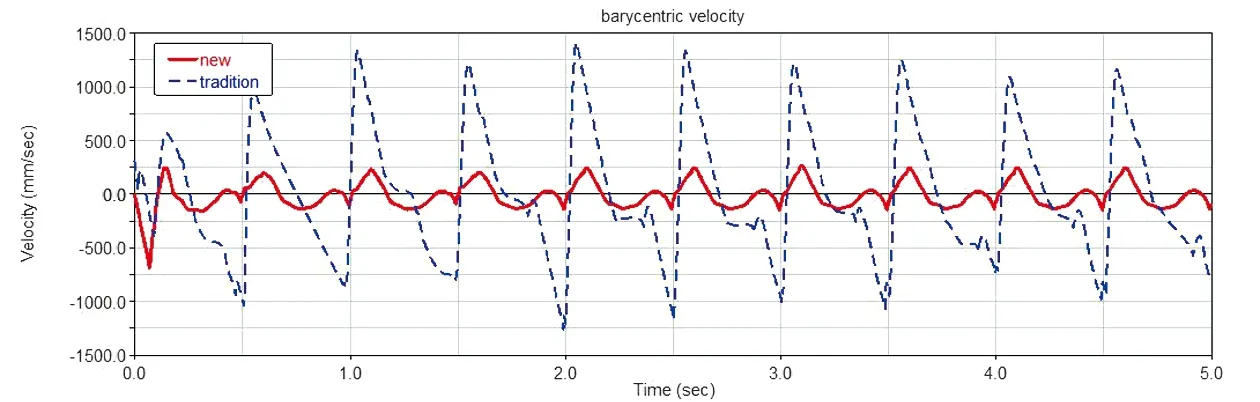
图9 质心垂向速度对比图
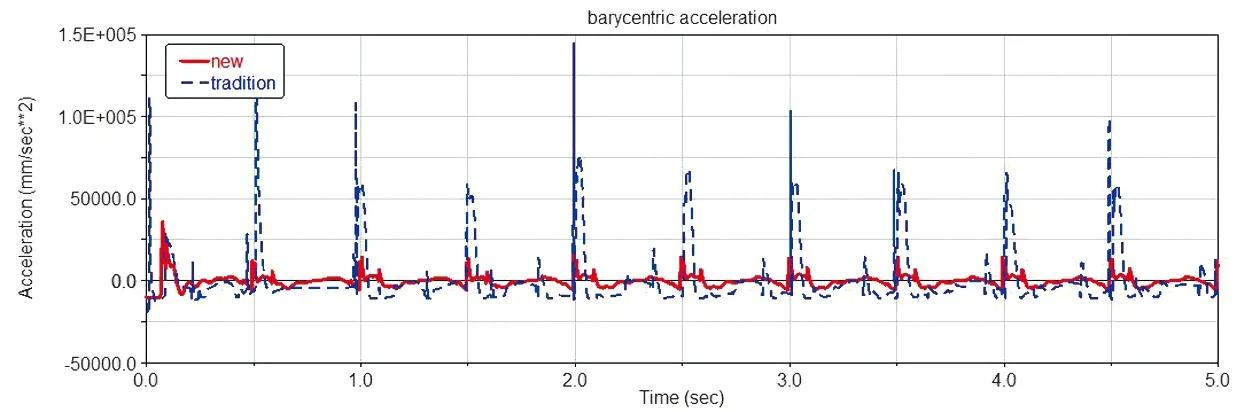
图10 质心垂向加速度对比图
根据汽车行驶平顺性计算公式对两种步行轮的轮心垂向加速度均方根进行计算,得出原步行轮垂向加速度均方根为0.81,而新型步行轮垂向加速度均方根为0.38。可见新型步行轮可以有效地减少轮心上下波动范围和降低轮心垂向加速度,平顺性与原步行轮相比具有较大提升。
3 结论
本文经过分析国内外各式步行轮研发现状,结合固沙草方格铺设装备需求,设计了一种新型步行轮。通过在Solidworks软件中建立步行轮的三维模型,导入多体动力学分析软件ADAMS中,合理假设沙地道路模型,采用对比分析法对步行轮进行研究。结果表明:在轮心角速度为110°/s、弹簧刚度系数为1.1×106N/m时,新型步行轮的轮心垂向位移达到最小值0.02 mm。相较原步行轮获得良好平顺性的同时减小使用能耗。本次对新型步行轮的分析,对后续设备装配与优化具有实际意义。